








安装参考
Windows下安装Ubuntu虚拟机及ROS
https://www.jianshu.com/p/5b4596d40897#2-%E5%AE%89%E8%A3%85ros
官网或网盘下载镜像,本例PC端安装ubuntu-gnome-16.04.3-desktop-amd64.iso;
https://www.ubuntu.com/download/alternative-downloads
链接:https://pan.baidu.com/s/1kENjOvblWX6ie29CgUPzUQ 密码:mltf
树莓派端;注意ubuntu mate暂时不兼容树莓派3B+;
https://ubuntu-pi-flavour-maker.org/download/
适用于3B+的ubuntu mate 16.04镜像 Ubuntu Mate SD.zip,百度云链接:
https://pan.baidu.com/s/1EX_nuQReV9IJuQfvkA9XWA
密码:osek
下载完成后,打开虚拟机,选择创建新的虚拟机;

选择下载好的ubuntu镜像
填入信息继续(全名、用户名、密码)
选择文件存放位置,继续选择最大磁盘大小,建议(30G),本例空间有限,只选默认值20G;
点击下一步,最后点击完成继续,虚拟机会重启开始安装(我安装的是gnome桌面的ubuntu)

安装完成后,输入密码进入
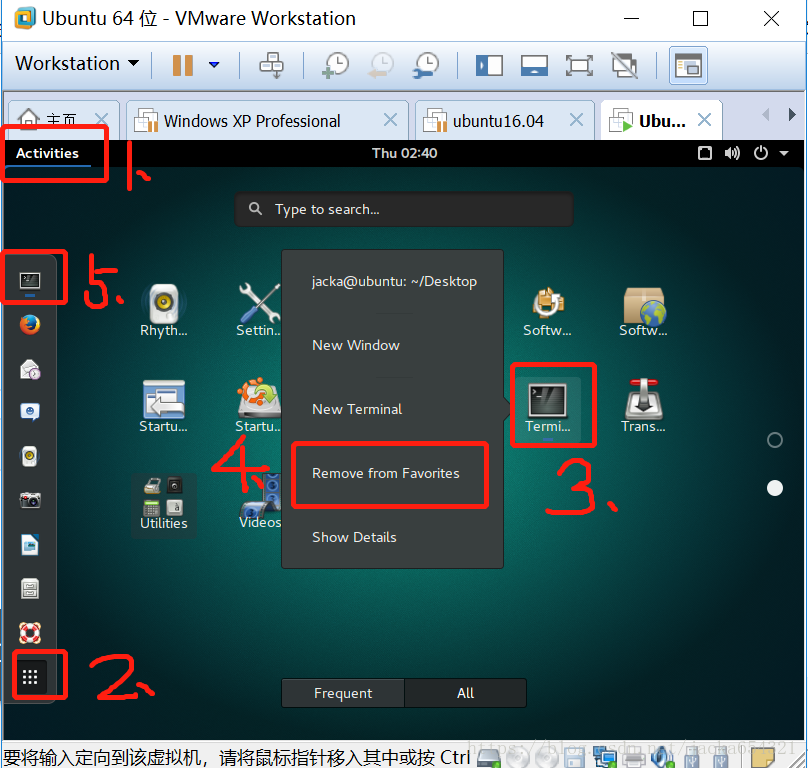
第一次接触这个版本,有点陌生,先把终端调出来;
找到Terminal图片,右击 添加 到常用快捷框;
可以 点击 Software & Updates这个图标,选择更新源

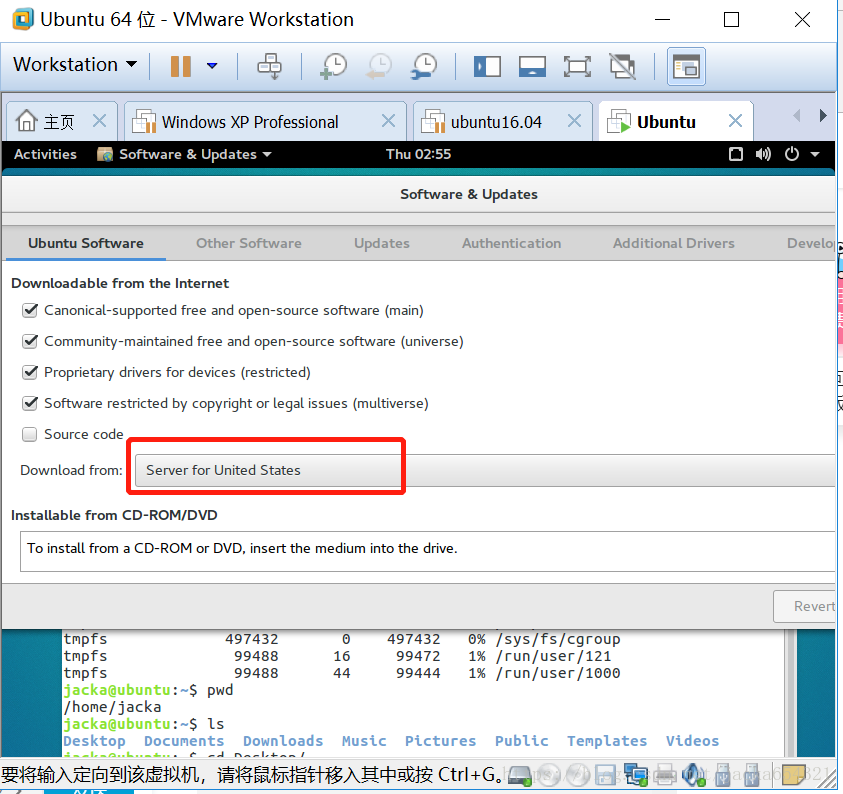
本例选 中国(China) 阿里云;
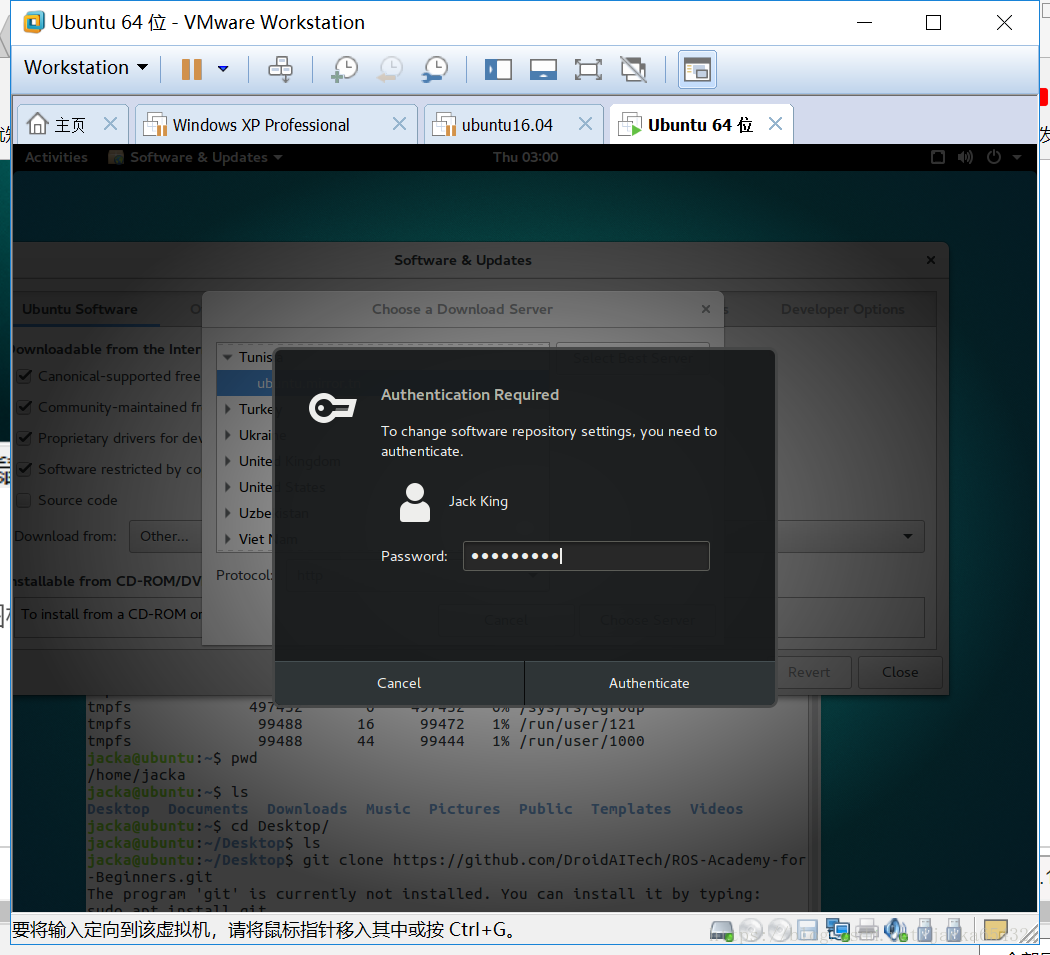
有权限认证,需要输入自己安装时设定的密码;
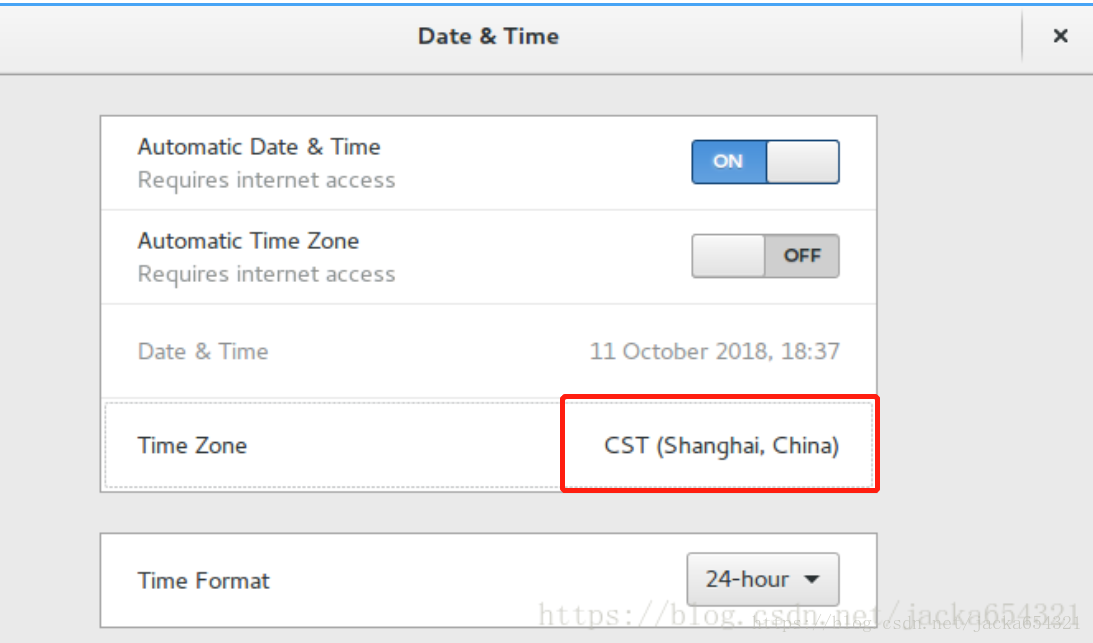
点击 右上角区域 修改时区:
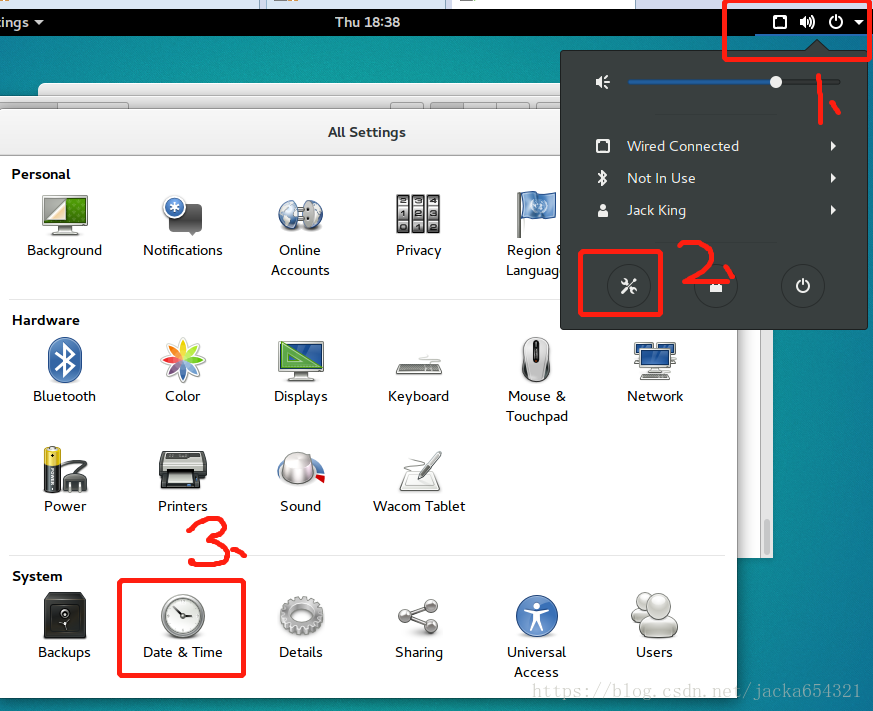
搜 sh 或点击中国地图,显示 上海,确认 时间与中国当前时间一致即可关闭;
安装ROS
脚本安装ROS-kinetic:
wget https://raw.githubusercontent.com/oroca/oroca-ros-pkg/kinetic/ros_install.sh && chmod 755 ./ros_install.sh && bash ./ros_install.sh catkin_ws kinetic用阿里云的源速度超快

有需要确认的,一路按 y,Enter确认即可;
catkin_ws/devel/setup.bash: No such file or directory 报错处理;
删除重复的配置行

https://blog.csdn.net/qq_35379989/article/details/78940961
如果还不成功,查看catkin_ws目录;如果只有src目录,需要执行catkin_make,生成相关文件及文件夹;
cd ~/catkin_ws/ 进入工作空间的目录。
再执行:
catkin_make 构建(build)这个工作空间。这时就会发现,在catkin_ws这个工作空间下,多出了两个文件夹“build”和“devel”。在devel文件夹下,还可以看到很多setup.*sh文件。输入如下命令就可以配置工作空间:
source devel/setup.bash 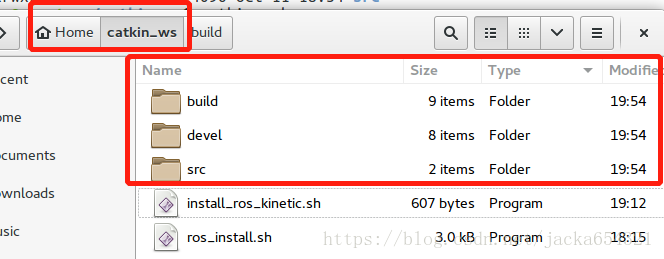
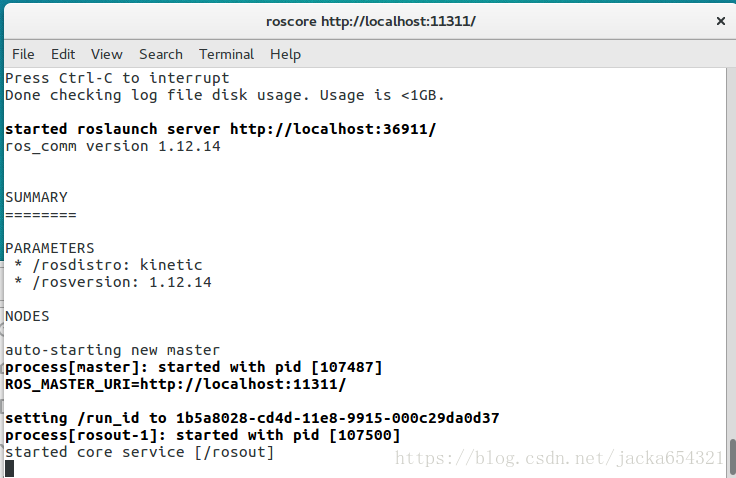
安装完测试:
roscore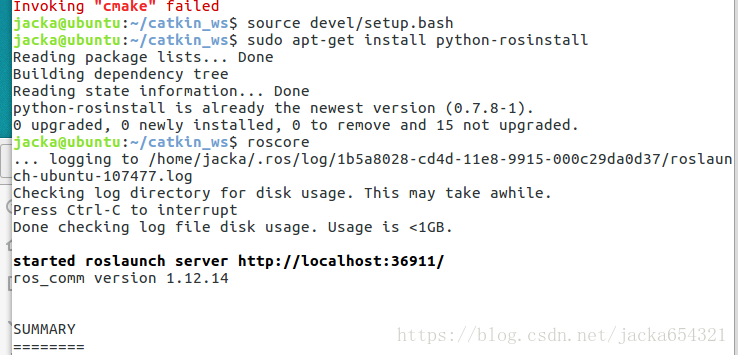
启动 turtlesim
启动一个turtlesim节点并通过键盘控制其运动,新开启一个终端,执行以下命令:
rosrun turtlesim turtlesim_node
然后,再开启一个终端:
rosrun turtlesim turtle_teleop_key
安装TurtleBot3及依赖包:
安装turtlebot3依赖包:
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers安装turtlebot3源码cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
- 环境设置
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
如果catkin_make完成没有任何错误,使用TurtleBot3的准备将完成。
安装ROS-Academy-for-Beginners教学包
下载源码包
在Ubuntu系统上,确保git已经安装
sudo apt-get install git
然后在创建一个名为tutorial_ws的工作空间,在它的的src路径下克隆ROS-Academy-for-Beginners软件包
mkdir -p tutorial_ws/src
cd tutorial_ws/src
git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git
安装依赖
并且安装ROS-Academy-for-Beginners所需要的依赖
cd ~/tutorial_ws
rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
注意:以上命令非常重要,缺少依赖将导致软件包无法正常编译和运行。
编译
接着回到catkin_ws下编译
cd ~/tutorial_ws
catkin_make
source ~/tutorial_ws/devel/setup.bash #刷新环境 方法一
# rospack profile #刷新环境 方法二
注意:source命令,编译完成后必须刷新一下工作空间的环境,否则可能找不到工作空间。许多时候我们为了打开终端就能够运行工作空间中编译好的ROS程序,我们习惯把source ~/tutorial_ws/devel/setup.bash命令追加到~/.bashrc文件中(rosacademy_ws替换为你的工作空间名称),这样每次打开终端,系统就会刷新工作空间环境。你可以通过echo "source ~/tutorial_ws/devel/setup.bash" >> ~/.bashrc命令来追加。
运行仿真程序
编译完成后就可以运行本教学配套的仿真了,输入
rospack profile
roslaunch robot_sim_demo robot_spawn.launch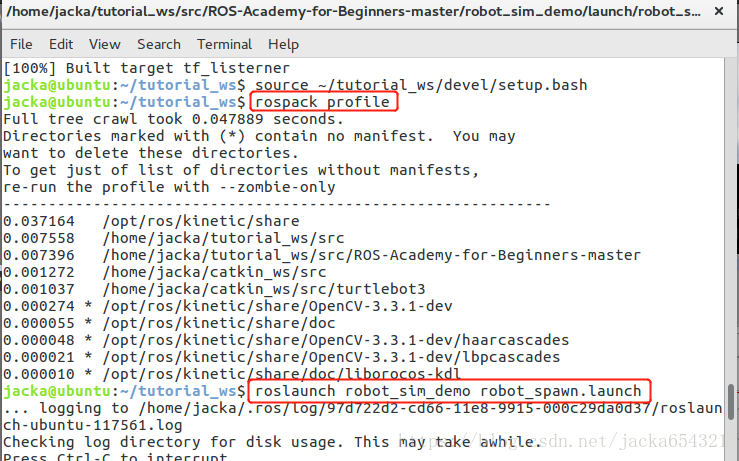
使用ROS安装脚本即可完成ROS的一键安装
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get -y install ros-kinetic-ros-base ros-kinetic-slam-gmapping ros-kinetic-navigation ros-kinetic-xacro ros-kinetic-yocs-velocity-smoother ros-kinetic-robot-state-publisher ros-kinetic-joint-state-publisher ros-kinetic-teleop-twist-*
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc复制上面脚本保存至文件install_ros_kinetic.sh,执行sh install_ros_kinetic.sh
源码安装ROS-kinetic:
安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或来自中国的源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
增加key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
更新
sudo apt-get update安装,这里介绍Desktop-Full安装: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
sudo apt-get install ros-kinetic-desktop-full
解决依赖
sudo rosdep init
rosdep update
环境设置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装rosinstall,便利的工具
sudo apt-get install python-rosinstall
参考链接:
ubuntu16.04下ROS Kinetic详细安装过程
https://blog.csdn.net/Guangli_R/article/details/80864440
安装ROS的步骤
https://sychaichangkun.gitbooks.io/ros-tutorial-icourse163/content/chapter1/1.4.html
树莓派3B plus 适用的ubuntu mate镜像
https://zhuanlan.zhihu.com/p/40665942
ROS的安装、测试及环境配置介绍














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









