







特征值和特征向量的实际意义
从定义出发,Ax=cx:A为矩阵,c为特征值,x为特征向量。
矩阵A乘以x表示,对向量x进行一次转换(旋转或拉伸)(是一种线性转换),而该转换的效果为常数c乘以向量x(即只进行拉伸)。
我们通常求特征值和特征向量即为求出该矩阵能使哪些向量(当然是特征向量)只发生拉伸,使其发生拉伸的程度如何(特征值大小)。这样做的意义在于,看清一个矩阵在那些方面能产生最大的效果(power),并根据所产生的每个特征向量(一般研究特征值最大的那几个)进行分类讨论与研究。
更新与2015.12.02 今天无意中看到了这篇介绍,感觉讲的很清晰,特与大家分享!
连接:http://jingyan.baidu.com/article/3065b3b68c6bb6becff8a488.html
大学中都学过矩阵,是不是矩阵感觉很抽象,晦涩难懂,和生活实际挂不上边,其中矩阵有一个叫特征向量的东西,只要学过矩阵的,都会求它,但是他是做什么的,书本上却没说,只是说相当有用,但是在何处用,大家只能说 I do not know ,这里给大家说明下,特征向量的几何意义,让大家一目了然
工具/原料
纸
笔
记得带着脑子哦
方法/步骤
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:
这时候λ就被称为特征向量v对应的特征值,一个矩阵的一组特征向量是一组正交向量。特征值分解是将一个矩阵分解成下面的形式:
其中Q是这个矩阵A的特征向量组成的矩阵,Σ是一个对角阵,每一个对角线上的元素就是一个特征值。首先,要明确的是,一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的一个矩阵:
它其实对应的线性变换是下面的形式:
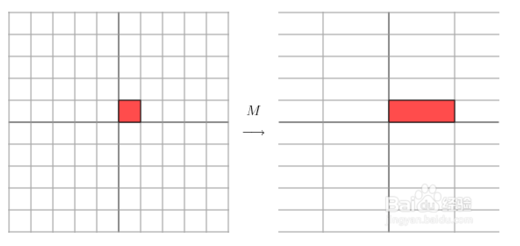
因为这个矩阵M乘以一个向量(x,y)的结果是:
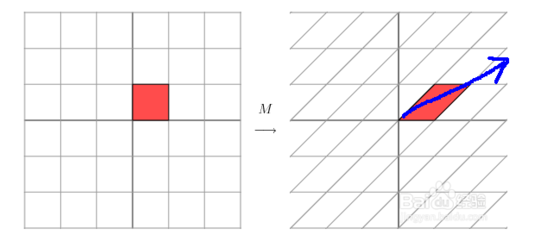
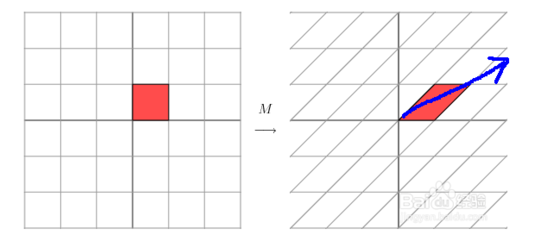
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
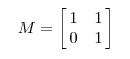
它所描述的变换是下面的样子:
这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示),在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
注意事项
最后一个条是关键,一定要仔细看
链接:https://www.zhihu.com/question/20507061/answer/120540926
来源:知乎
著作权归作者所有,转载请联系作者获得授权。
参考:https://www.zhihu.com/question/20507061
一、先从旋转和缩放角度,理解一下特征向量和特征值的几何意义
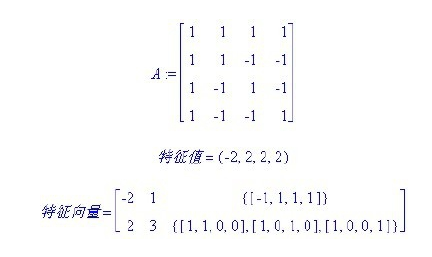
从定义来理解特征向量的话,就是经过一个矩阵变换后,空间沿着特征向量的方向上相当于只发生了缩放,比如我们考虑下面的矩阵:
求这个变换的特征向量和特征值,分别是:
和
1.81,0.69
用一个形象的例子来说明一下几何意义,我们考虑下面笑脸图案:
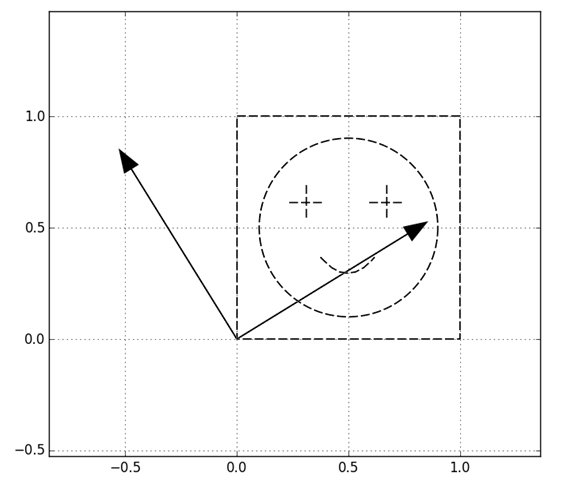
为方便演示笑脸图案在0,0和1,1围起来的单位正方形里,同时也用两个箭头标出来了特征向量的方向。经过
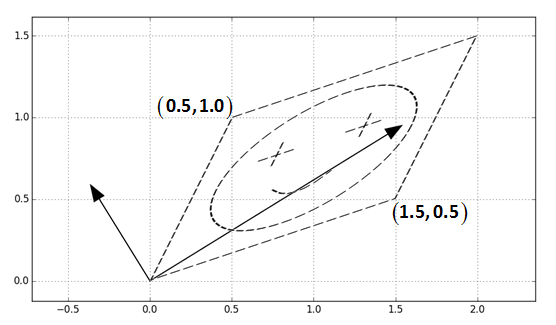 可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
可以看到就是沿着两个正交的,特征向量的方向进行了缩放。这就是特征向量的一般的几何理解,这个理解我们也可以分解一下,从旋转和沿轴缩放的角度理解,分成三步:
第一步,把特征向量所指的方向分别转到横轴和纵轴
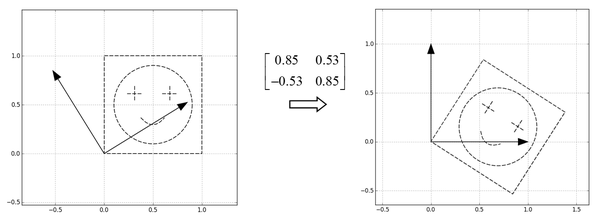
这一步相当于用U的转置,也就是
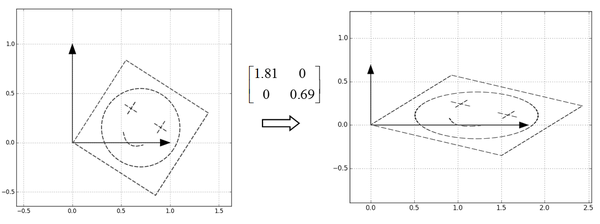
第二步,然后把特征值作为缩放倍数,构造一个缩放矩阵
第三步,很自然地,接下来只要把这个图案转回去,也就是直接乘U就可以了
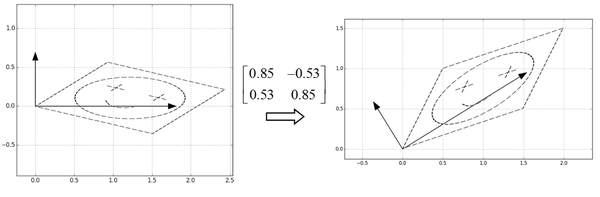 所以,从旋转和缩放的角度,一个矩阵变换就是,旋转-->沿坐标轴缩放-->转回来,的三步操作,表达如下:
所以,从旋转和缩放的角度,一个矩阵变换就是,旋转-->沿坐标轴缩放-->转回来,的三步操作,表达如下:
所以,从旋转和缩放的角度,一个矩阵变换就是,旋转-->沿坐标轴缩放-->转回来,的三步操作,表达如下:
所以,从旋转和缩放的角度,一个矩阵变换就是,旋转-->沿坐标轴缩放-->转回来,的三步操作,表达如下:
多提一句,这里给的是个(半)正定矩阵的例子,对于不镇定的矩阵,也是能分解为,旋转-->沿坐标轴缩放-->旋转,的三步的,只不过最后一步和第一步的两个旋转不是转回去的关系了,表达如下:
这个就是SVD分解,就不详细说了。
另外,这个例子是二维的,高维类似,但是形象理解需要脑补。
==================================================
如果对协方差矩阵和特征值特征向量的关系有兴趣,原答案地址:
主成分分析PCA算法:为什么去均值以后的高维矩阵乘以其协方差矩阵的特征向量矩阵就是“投影”? - 達聞西的回答














 7227
7227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









