一、Vold工作机制
Vold是Volume Daemon的缩写,它是Android平台中外部存储系统的管控中心,是管理和控制Android平台外部存储设备的后台进程。其功能主要包括:SD卡的插拔事件检测、SD卡挂载、卸载、格式化等。
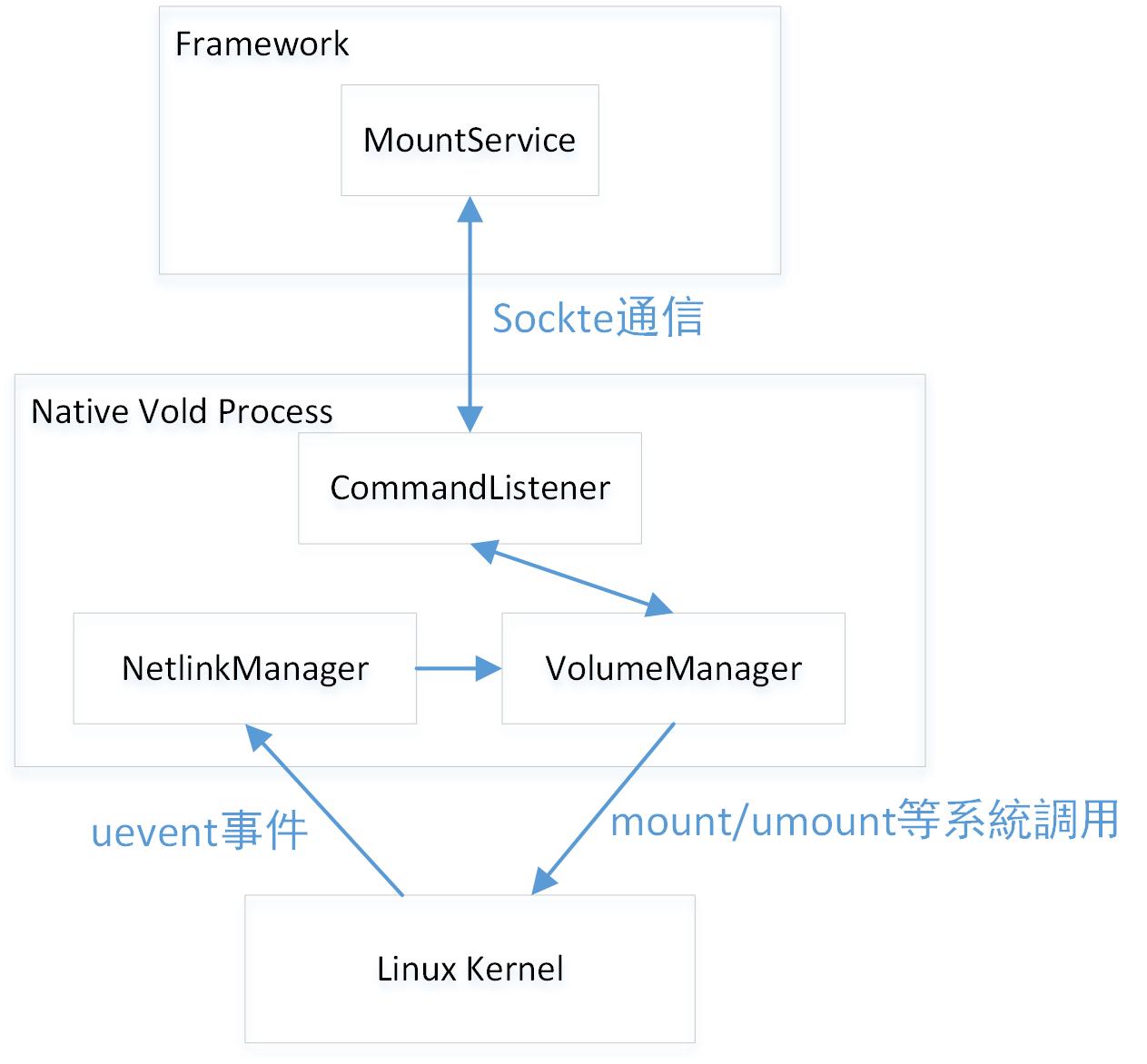
如上图所示,Vold中的NetlinkManager模块接收来自Linux Kernel的uevent消息。
NetlinkManager将这些消息转发给VolumeManager模块。VolumeManager会对应做一些操作,然后把相关信息通过CommandListener发送给MountService。
MountService根据收到的消息后,根据情况会利用CommandListener发送相关的处理命令给VolumeManager做进一步处理。
CommandListener模块内部封装了一个Socket用于跨进程通信。它一方面接收来自MountService的控制命令,另一方面VolumeManager通过它将消息发送给MountService。
Tips:
Netlink是Linux系统中用户空间进程和Kernel进行通信的一种机制,是基于Socket的异步通信机制。
通过这种机制,位于用户空间的进程可以接收来自Kernel的一些信息,同时用户空间进程也可以利用Netlink向Kernel发送一些控制命令。
二、Vold进程启动过程
Vold进程启动文件定义于system/vold/vold.rc文件中:
service vold /system/bin/vold \
class core
socket vold stream 0660 root mount
socket cryptd stream 0660 root mount
ioprio be 2
writepid /dev/cpuset/foreground/tasks
被init进程启动后,将调用system/vold/main.cpp中的main函数:
int main(int argc, char** argv) {
.............
VolumeManager *vm;
CommandListener *cl;
.............
NetlinkManager *nm;
parse_args(argc, argv);
..............
fcntl(android_get_control_socket("vold"), F_SETFD, FD_CLOEXEC);
fcntl(android_get_control_socket("cryptd"), F_SETFD, FD_CLOEXEC);
mkdir("/dev/block/vold", 0755);
.........
if (!(vm = VolumeManager::Instance())) {
LOG(ERROR) << "Unable to create VolumeManager";
exit(1);
}
if (!(nm = NetlinkManager::Instance())) {
LOG(ERROR) << "Unable to create NetlinkManager";
exit(1);
}
...................
cl = new CommandListener();
............
vm->setBroadcaster((SocketListener *) cl);
nm->setBroadcaster((SocketListener *) cl);
if (vm->start()) {
PLOG(ERROR) << "Unable to start VolumeManager";
exit(1);
}
if (process_config(vm)) {
PLOG(ERROR) << "Error reading configuration... continuing anyways";
}
if (nm->start()) {
PLOG(ERROR) << "Unable to start NetlinkManager";
exit(1);
}
coldboot("/sys/block");
if (cl->startListener()) {
PLOG(ERROR) << "Unable to start CommandListener";
exit(1);
}
.......
while(1) {
sleep(1000);
}
LOG(ERROR) << "Vold exiting";
exit(0);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
从上面的代码不难看出,Vold进程的main函数中,创建并启动其子模块VolumeManager、NetlinkManager和CommandListener后,就不再执行实际的工作了。
以后Vold进程具体的工作就会交付给子模块进行处理。
三、Vold进程中各模块分析
为了进一步了解整个Vold进程的主要工作流程,接下来我们分析一下其主要模块的工作流程。
1、NetlinkManager模块
1.1 NetlinkManager的创建和启动
在Vold的main函数中,调用NetlinkManager::Instance创建出NetlinkManager:
NetlinkManager *NetlinkManager::Instance() {
if (!sInstance)
sInstance = new NetlinkManager();
return sInstance;
}
NetlinkManager::NetlinkManager() {
mBroadcaster = NULL;
}
从上面的代码可以看到,NetlinkManager的创建比较简单。
在创建出NetlinkManager后,Vold调用了NetlinkManager的setBroadcaster函数:
void setBroadcaster(SocketListener *sl) { mBroadcaster = sl; }
依然言简意赅。
这里唯一需要说明的是,Android这里的设计看起来比较很奇怪,虽然NetlinkManager设置了CommandListener对象,但它并没有通过CommandListener发送消息和接收命令。
配置好NetlinkManager后,Vold就调用了NetlinkManger的start函数:
int NetlinkManager::start() {
struct sockaddr_nl nladdr;
int sz = 64 * 1024;
int on = 1;
memset(&nladdr, 0, sizeof(nladdr));
nladdr.nl_family = AF_NETLINK;
nladdr.nl_pid = getpid();
nladdr.nl_groups = 0xffffffff;
if ((mSock = socket(PF_NETLINK, SOCK_DGRAM | SOCK_CLOEXEC,
NETLINK_KOBJECT_UEVENT)) < 0) {
SLOGE("Unable to create uevent socket: %s", strerror(errno));
return -1;
}
if (setsockopt(mSock, SOL_SOCKET, SO_RCVBUFFORCE, &sz, sizeof(sz)) < 0) {
SLOGE("Unable to set uevent socket SO_RCVBUFFORCE option: %s", strerror(errno));
goto out;
}
if (setsockopt(mSock, SOL_SOCKET, SO_PASSCRED, &on, sizeof(on)) < 0) {
SLOGE("Unable to set uevent socket SO_PASSCRED option: %s", strerror(errno));
goto out;
}
if (bind(mSock, (struct sockaddr *) &nladdr, sizeof(nladdr)) < 0) {
SLOGE("Unable to bind uevent socket: %s", strerror(errno));
goto out;
}
mHandler = new NetlinkHandler(mSock);
if (mHandler->start()) {
SLOGE("Unable to start NetlinkHandler: %s", strerror(errno));
goto out;
}
return 0;
out:
close(mSock);
return -1;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
通过上面的代码不难看出,其实NetlinkManager启动后就是创建一个可以接收Kernel消息的socket,并以此socket构建并启动NetlinkHandler。
可以预见NetlinkHandler将用来处理socket收到的信息。
1.2 NetlinkHandler
NetlinkHandler::NetlinkHandler(int listenerSocket) :
NetlinkListener(listenerSocket) {
}
NetlinkHandler初始化时,将与Kernel通信的socket描述符传入到父类NetlinkListener中。
NetlinkListener::NetlinkListener(int socket) :
SocketListener(socket, false) {
mFormat = NETLINK_FORMAT_ASCII;
}
NetlinkListener又进一步调用其父类SocketListener:
SocketListener::SocketListener(int socketFd, bool listen) {
init(NULL, socketFd, listen, false);
}
void SocketListener::init(const char *socketName, int socketFd, bool listen, bool useCmdNum) {
mListen = listen;
mSocketName = socketName;
mSock = socketFd;
mUseCmdNum = useCmdNum;
pthread_mutex_init(&mClientsLock, NULL);
mClients = new SocketClientCollection();
}
从上面的代码可以看出,NetlinkHandler对应的继承体系如下图所示:
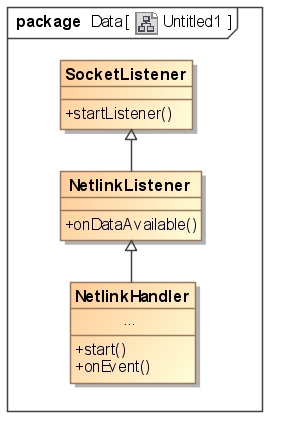
创建完NetlinkHandler后,NetlinkManager调用了NetlinkHandler的start方法:
int NetlinkHandler::start() {
return this->startListener();
}
int SocketListener::startListener() {
return startListener(4);
}
int SocketListener::startListener(int backlog) {
................
if (mListen && listen(mSock, backlog) < 0) {
..............
} else if (!mListen)
mClients->push_back(new SocketClient(mSock, false, mUseCmdNum));
if (pipe(mCtrlPipe)) {
SLOGE("pipe failed (%s)", strerror(errno));
return -1;
}
if (pthread_create(&mThread, NULL, SocketListener::threadStart, this)) {
SLOGE("pthread_create (%s)", strerror(errno));
return -1;
}
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
至此,我们知道了NetlinkHandler启动后,创建了一个工作线程,用于接收和处理数据。现在进一步看看threadStart函数:
void *SocketListener::threadStart(void *obj) {
SocketListener *me = reinterpret_cast<SocketListener *>(obj);
me->runListener();
pthread_exit(NULL);
return NULL;
}
void SocketListener::runListener() {
SocketClientCollection pendingList;
while(1) {
SocketClientCollection::iterator it;
fd_set read_fds;
int rc = 0;
int max = -1;
FD_ZERO(&read_fds);
..........
FD_SET(mCtrlPipe[0], &read_fds);
if (mCtrlPipe[0] > max)
max = mCtrlPipe[0];
pthread_mutex_lock(&mClientsLock);
for (it = mClients->begin(); it != mClients->end(); ++it) {
int fd = (*it)->getSocket();
FD_SET(fd, &read_fds);
if (fd > max) {
max = fd;
}
}
pthread_mutex_unlock(&mClientsLock);
...............
if ((rc = select(max + 1, &read_fds, NULL, NULL, NULL)) < 0) {
............
} else if (!rc)
continue;
if (FD_ISSET(mCtrlPipe[0], &read_fds)) {
char c = CtrlPipe_Shutdown;
TEMP_FAILURE_RETRY(read(mCtrlPipe[0], &c, 1));
if (c == CtrlPipe_Shutdown) {
break;
}
continue;
}
if (mListen && FD_ISSET(mSock, &read_fds)) {
sockaddr_storage ss;
sockaddr* addrp = reinterpret_cast<sockaddr*>(&ss);
socklen_t alen;
int c;
do {
alen = sizeof(ss);
c = accept(mSock, addrp, &alen);
SLOGV("%s got %d from accept", mSocketName, c);
} while (c < 0 && errno == EINTR);
if (c < 0) {
SLOGE("accept failed (%s)", strerror(errno));
sleep(1);
continue;
}
fcntl(c, F_SETFD, FD_CLOEXEC);
pthread_mutex_lock(&mClientsLock);
mClients->push_back(new SocketClient(c, true, mUseCmdNum));
pthread_mutex_unlock(&mClientsLock);
}
pendingList.clear();
pthread_mutex_lock(&mClientsLock);
for (it = mClients->begin(); it != mClients->end(); ++it) {
SocketClient* c = *it;
int fd = c->getSocket();
if (FD_ISSET(fd, &read_fds)) {
pendingList.push_back(c);
c->incRef();
}
}
pthread_mutex_unlock(&mClientsLock);
while (!pendingList.empty()) {
it = pendingList.begin();
SocketClient* c = *it;
pendingList.erase(it);
if (!onDataAvailable(c)) {
release(c, false);
}
c->decRef();
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
上面的代码看起来比较复杂,主要是因为考虑到了Socket作为服务端的情况。
在NetlinkHandler中Socket仅作为客户端接收数据,因此在上面的代码中,其实就是利用子类的onDataAvailable函数处理收到的数据而已。
bool NetlinkListener::onDataAvailable(SocketClient *cli)
{
int socket = cli->getSocket();
ssize_t count;
uid_t uid = -1;
.................
count = TEMP_FAILURE_RETRY(uevent_kernel_recv(socket,
mBuffer, sizeof(mBuffer), require_group, &uid));
if (count < 0) {
........
return false;
}
NetlinkEvent *evt = new NetlinkEvent();
if (evt->decode(mBuffer, count, mFormat)) {
onEvent(evt);
} else if (mFormat != NETLINK_FORMAT_BINARY) {
..........
}
delete evt;
return true;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
上面的代码比较简单,其实就是从socket中的字节流中取出Uevent事件,然后将这些事件解码成NetlinkEvent,然后利用子类的onEvent做进一步处理。
void NetlinkHandler::onEvent(NetlinkEvent *evt) {
VolumeManager *vm = VolumeManager::Instance();
const char *subsys = evt->getSubsystem();
if (!subsys) {
SLOGW("No subsystem found in netlink event");
return;
}
if (!strcmp(subsys, "block")) {
vm->handleBlockEvent(evt);
}
}
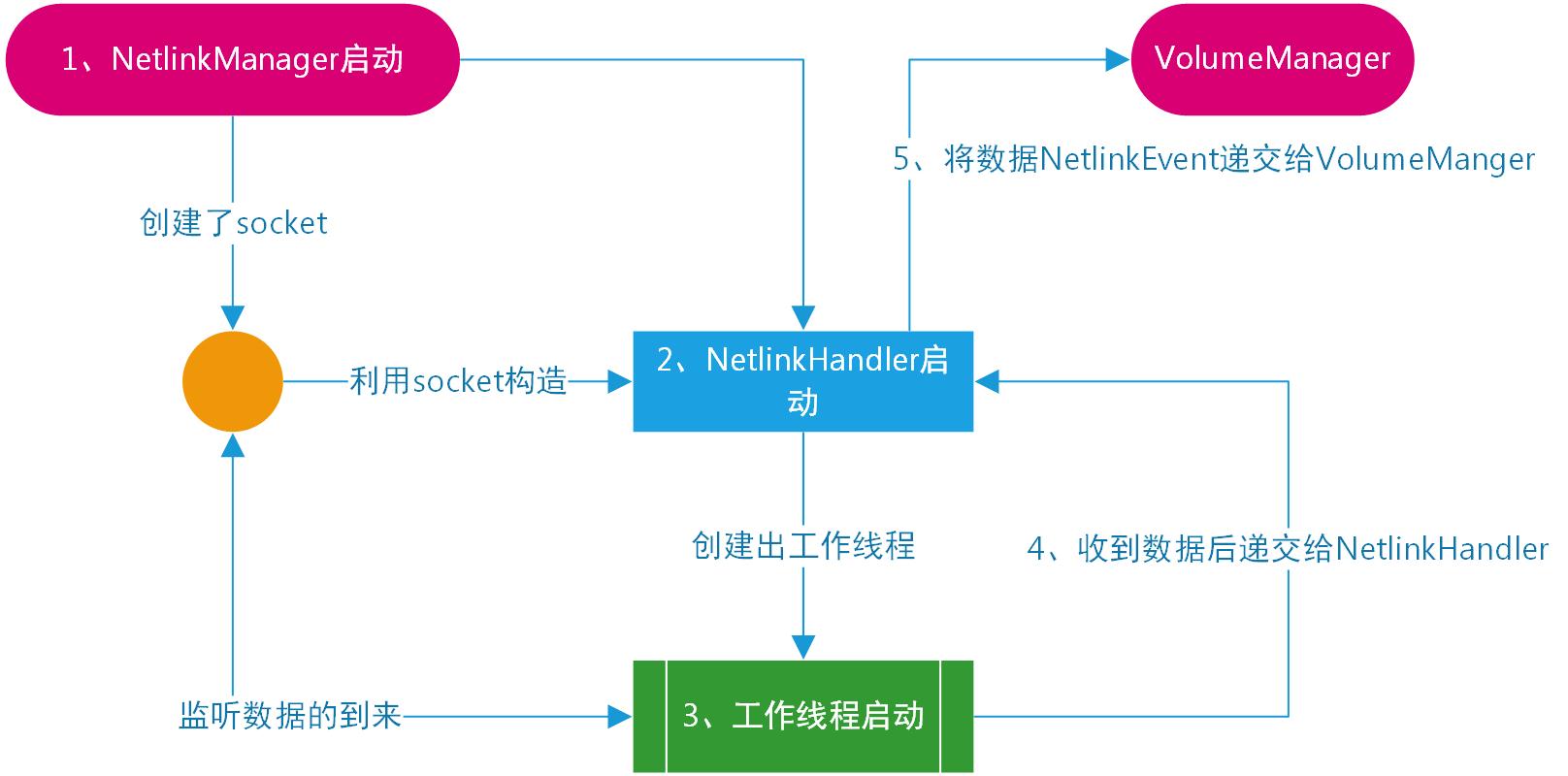
最后总结一下NetlinkManager模块的工作,如上图所示:
1、NetlinkManager启动后,将创建出与Kernel通信的socket,并用此socket创建出NetlinkHandler。
2、NetlinkHandler启动后,将创建出工作线程(其父类函数完成)。
3、工作线程启动后,将负责监听socket是否有数据到来。
4、当工作线程监听到数据到来后,负责将数据递交给NetlinkHandler。
5、NetlinkHandler负责从socket中的数据中解析出Uevent,并进一步解码成NetlinkEvent,以递交给VolumeManager。
2、VolumeManager模块
2.1 VolumeManager的创建和启动
在Vold的main函数中,调用VolumeManager的instance函数创建VolumeManager:
VolumeManager *VolumeManager::Instance() {
if (!sInstance)
sInstance = new VolumeManager();
return sInstance;
}
VolumeManager::VolumeManager() {
mDebug = false;
mActiveContainers = new AsecIdCollection();
mBroadcaster = NULL;
mUmsSharingCount = 0;
mSavedDirtyRatio = -1;
mUmsDirtyRatio = 0;
}
容易看出VolumeManager也是单例模式创建的。
接着,Vold进程利用VolumeManager的setBroadcaster函数,将Commandlistener对象赋予VolumeManager。
void setBroadcaster(SocketListener *sl) { mBroadcaster = sl; }
完成VolumeManager的创建后,Vold进程调用start函数,启动VolumeManager:
int VolumeManager::start() {
unmountAll();
CHECK(mInternalEmulated == nullptr);
mInternalEmulated = std::shared_ptr<android::vold::VolumeBase>(
new android::vold::EmulatedVolume("/data/media"));
mInternalEmulated->create();
return 0;
}
从上面的代码可以看出,VolumeManager启动后就干了两件事:
1、清楚所有已挂载的设备。正如注释所说的,通过这种方式可以让VolumeManager每次都从一个确定的“干净”的状态启动,避免之前出现Vold进程出现过crash。
看看unmountAll函数:
int VolumeManager::unmountAll() {
std::lock_guard<std::mutex> lock(mLock);
if (mInternalEmulated != nullptr) {
mInternalEmulated->unmount();
}
for (auto disk : mDisks) {
disk->unmountAll();
}
FILE* fp = setmntent("/proc/mounts", "r");
if (fp == NULL) {
SLOGE("Error opening /proc/mounts: %s", strerror(errno));
return -errno;
}
std::list<std::string> toUnmount;
mntent* mentry;
while ((mentry = getmntent(fp)) != NULL) {
if (strncmp(mentry->mnt_dir, "/mnt/", 5) == 0
|| strncmp(mentry->mnt_dir, "/storage/", 9) == 0) {
toUnmount.push_front(std::string(mentry->mnt_dir));
}
}
endmntent(fp);
for (auto path : toUnmount) {
SLOGW("Tearing down stale mount %s", path.c_str());
android::vold::ForceUnmount(path);
}
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
unmountAll的内容比较简单,同时注释清晰,此处不再赘述。
2、创建一个内部的挂载设备。
mInternalEmulated是一个VolumeBase类型的对象,我们看看其create函数:
status_t VolumeBase::create() {
CHECK(!mCreated)
mCreated = true
//doCreate进行实际的创建
status_t res = doCreate()
//通过CommandListener通知框架中的MountService
notifyEvent(ResponseCode::VolumeCreated,
StringPrintf("%d \"%s\" \"%s\"", mType, mDiskId.c_str(), mPartGuid.c_str()))
setState(State::kUnmounted)
return res
}
2.2 配置VolumeManager
当Vold创建并启动完VolumeManager后,就调用process_config函数对VolumeManager进行配置:
static int process_config(VolumeManager *vm) {
std::string path(android::vold::DefaultFstabPath());
fstab = fs_mgr_read_fstab(path.c_str());
...........
........
for (int i = 0; i < fstab->num_entries; i++) {
if (fs_mgr_is_voldmanaged(&fstab->recs[i])) {
...........
vm->addDiskSource(std::shared_ptr<VolumeManager::DiskSource>(
new VolumeManager::DiskSource(sysPattern, nickname, flags)));
}
}
................
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
结合代码,我们知道process_config其实就是解析fstab文件,然后设置一些存储设备的挂载点。
2.3 NetlinkManager与VolumeManager之间的交互
在前面介绍NetlinkManager时,我们知道当NetlinkManager收到Kernel的事件后,将利用NetlinkHandler通知VolumeManager:
void NetlinkHandler::onEvent(NetlinkEvent *evt) {
VolumeManager *vm = VolumeManager::Instance();
const char *subsys = evt->getSubsystem();
if (!subsys) {
SLOGW("No subsystem found in netlink event");
return;
}
if (!strcmp(subsys, "block")) {
vm->handleBlockEvent(evt);
}
}
我们看看VolumeManager的handleBlockeEvent:
void VolumeManager::handleBlockEvent(NetlinkEvent *evt) {
..............
int major = atoi(evt->findParam("MAJOR"));
int minor = atoi(evt->findParam("MINOR"));
dev_t device = makedev(major, minor);
switch (evt->getAction()) {
case NetlinkEvent::Action::kAdd: {
.........
auto disk = new android::vold::Disk(eventPath, device,
source->getNickname(), flags);
disk->create();
mDisks.push_back(std::shared_ptr<android::vold::Disk>(disk));
break;
}
case NetlinkEvent::Action::kChange: {
..........
for (auto disk : mDisks) {
if (disk->getDevice() == device) {
disk->readMetadata();
disk->readPartitions();
}
}
break;
}
case NetlinkEvent::Action::kRemove: {
auto i = mDisks.begin();
while (i != mDisks.end()) {
if ((*i)->getDevice() == device) {
(*i)->destroy();
i = mDisks.erase(i);
} else {
++i;
}
}
break;
}
default: {
LOG(WARNING) << "Unexpected block event action " << (int) evt->getAction();
break;
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
至此VolumeManager的主要工作介绍完毕,从上面的代码可以看出VolumeManager使用Disk对象来抽象实际的存储设备。
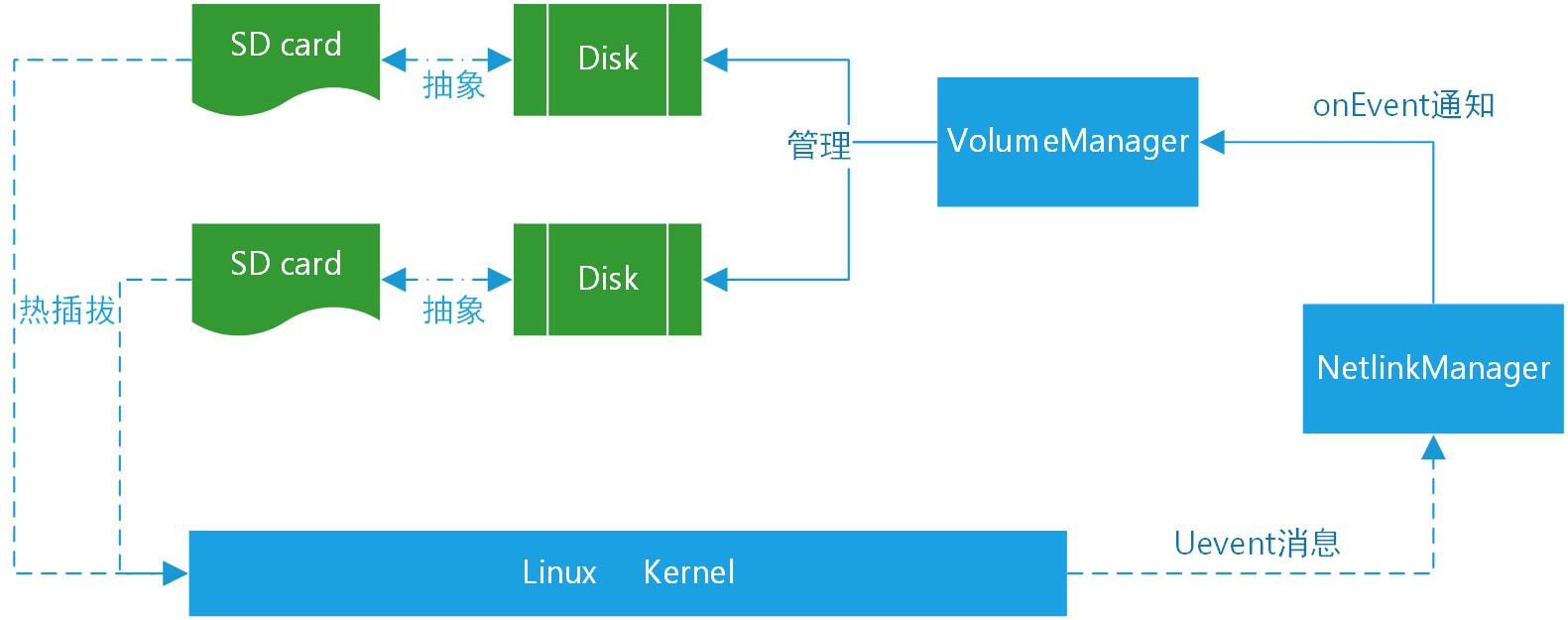
我们现在可以结合上图总结一下VolumeManager的工作流程:
1、存储设备发生变化(如热插拔等),将导致Linux Kernel发出Uevent消息给NetlinkManager。
2、NetlinkManager将事件通知给VolumeManager。
3、VolumeManager根据事件的内容,判断是设备的变化情况,然后操作对应的Disk对象。例如新增存储设备,就利用事件中的内容创建出新的Disk(创建Disk时,就会进一步读取分区信息,创建出Volume对象,此处不再细分);设备被移除了,VolumeManager就负责移除对应的Disk。
到目前为止,我们分析的流程都停留在Vold进程中,并没有与Android框架发生实际的交互。为了引出交互的实际流程,我们需要先分析一下Vold进程与框架交互的桥梁,即CommandListener。
3、CommandListener
3.1 CommandListener的创建
Vold进程在main函数中创建出了CommandListener,然后调用了CommandListener的startListener函数。
我们先看看CommandListener的构造函数:
class CommandListener : public FrameworkListener {
........
}
从定义来看CommandListener继承于FrameworkListener。
CommandListener::CommandListener() :
FrameworkListener("vold", true) {
//注册CommandListener支持的命令
registerCmd(new DumpCmd());
registerCmd(new VolumeCmd());
registerCmd(new AsecCmd());
registerCmd(new ObbCmd());
registerCmd(new StorageCmd());
registerCmd(new FstrimCmd());
registerCmd(new AppFuseCmd());
}
在CommandListener的构造函数中,调用了父类的构造函数,同时利用其父类的registerCmd函数创建并注册了一些Cmd对象。
我们看看FrameworkListener:
FrameworkListener::FrameworkListener(const char *socketName, bool withSeq) :
SocketListener(socketName, true, withSeq) {
init(socketName, withSeq);
}
void FrameworkListener::init(const char *socketName UNUSED, bool withSeq) {
mCommands = new FrameworkCommandCollection();
errorRate = 0;
mCommandCount = 0;
mWithSeq = withSeq;
}
void FrameworkListener::registerCmd(FrameworkCommand *cmd) {
mCommands->push_back(cmd);
}
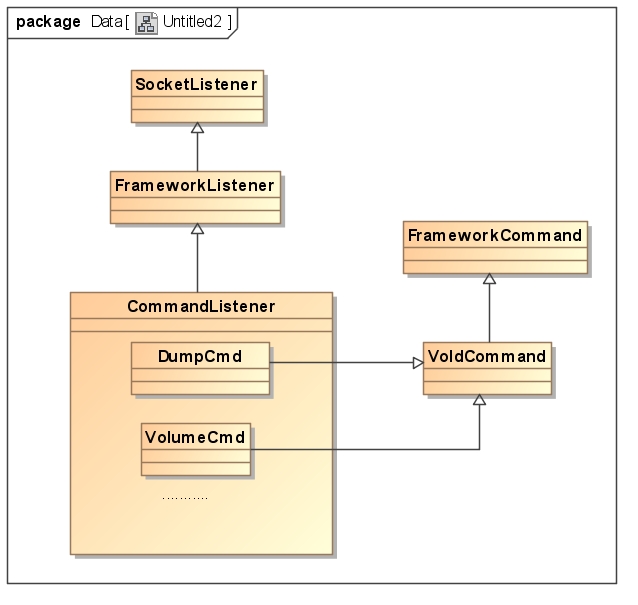
根据前面的代码,我们可以得到上图的继承关系。
可以看到与之前分析NetlinkManager一样,CommandListener最终继承自SocketListener。不过与NetlinkManager不同的是,CommandListener传入到SocketListener的mListen参数为true,这意味着CommandListener中的socket将作为服务端存在。
从FrameworkListener的registerCmd函数来看,FrameworkListener仅仅是保存了新创建的Cmd对象。这里采用了设计模式中的Command模式,每个命令的处理函数都是runCommand。
3.2 CommandListener启动
当Vold进程创建出CommandListener后,同样调用了CommandListener的startListener函数。
根据继承关系,我们知道最终将会调用到SocketListener的startListener函数。
在分析NetlinkManager时,我们已经分析过SocketListener的startListener函数。在startListener函数中将启动一个工作线程,以监听对应socket的数据。
此处CommandListener监听的是init进程创建出Vold进程后,Vold进程创建的名为”vold”的socket,并且该socket是作为服务端存在的。当服务端收到注册请求后,将生成对应的SocketClient对象。然后,工作线程就可以监听SocketClient是否有数据到来。
“vold”的客户端是MountService。与之前分析的一样,当工作线程收到客户端数据时,将调用子类的onDataAvailable函数进行处理。
此时SocketListener的子类是FrameworkListener:
bool FrameworkListener::onDataAvailable(SocketClient *c) {
char buffer[CMD_BUF_SIZE];
int len;
len = TEMP_FAILURE_RETRY(read(c->getSocket(), buffer, sizeof(buffer)));
............
for (i = 0; i < len; i++) {
if (buffer[i] == '\0') {
dispatchCommand(c, buffer + offset);
offset = i + 1;
}
}
return true;
}
void FrameworkListener::dispatchCommand(SocketClient *cli, char *data) {
............
for (i = mCommands->begin(); i != mCommands->end(); ++i) {
FrameworkCommand *c = *i;
if (!strcmp(argv[0], c->getCommand())) {
if (c->runCommand(cli, argc, argv)) {
SLOGW("Handler '%s' error (%s)", c->getCommand(), strerror(errno));
}
goto out;
}
}
............
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
以DumpCommand举例,看看runCommand函数:
int CommandListener::DumpCmd::runCommand(SocketClient *cli,
int , char ** ) {
cli->sendMsg(0, "Dumping loop status", false);
if (Loop::dumpState(cli)) {
cli->sendMsg(ResponseCode::CommandOkay, "Loop dump failed", true);
}
cli->sendMsg(0, "Dumping DM status", false);
if (Devmapper::dumpState(cli)) {
cli->sendMsg(ResponseCode::CommandOkay, "Devmapper dump failed", true);
}
cli->sendMsg(0, "Dumping mounted filesystems", false);
FILE *fp = fopen("/proc/mounts", "r");
if (fp) {
char line[1024];
while (fgets(line, sizeof(line), fp)) {
line[strlen(line)-1] = '\0';
cli->sendMsg(0, line, false);;
}
fclose(fp);
}
cli->sendMsg(ResponseCode::CommandOkay, "dump complete", false);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
从上面的代码容易看出,DumpCmd执行相应的操作后,都是通过SocketClient的sendMsg发送结果。在SocketClient的底层,就是靠”vold” socket将数据返回给MountService。
现在我们总结一下CommandListener涉及的工作流程:
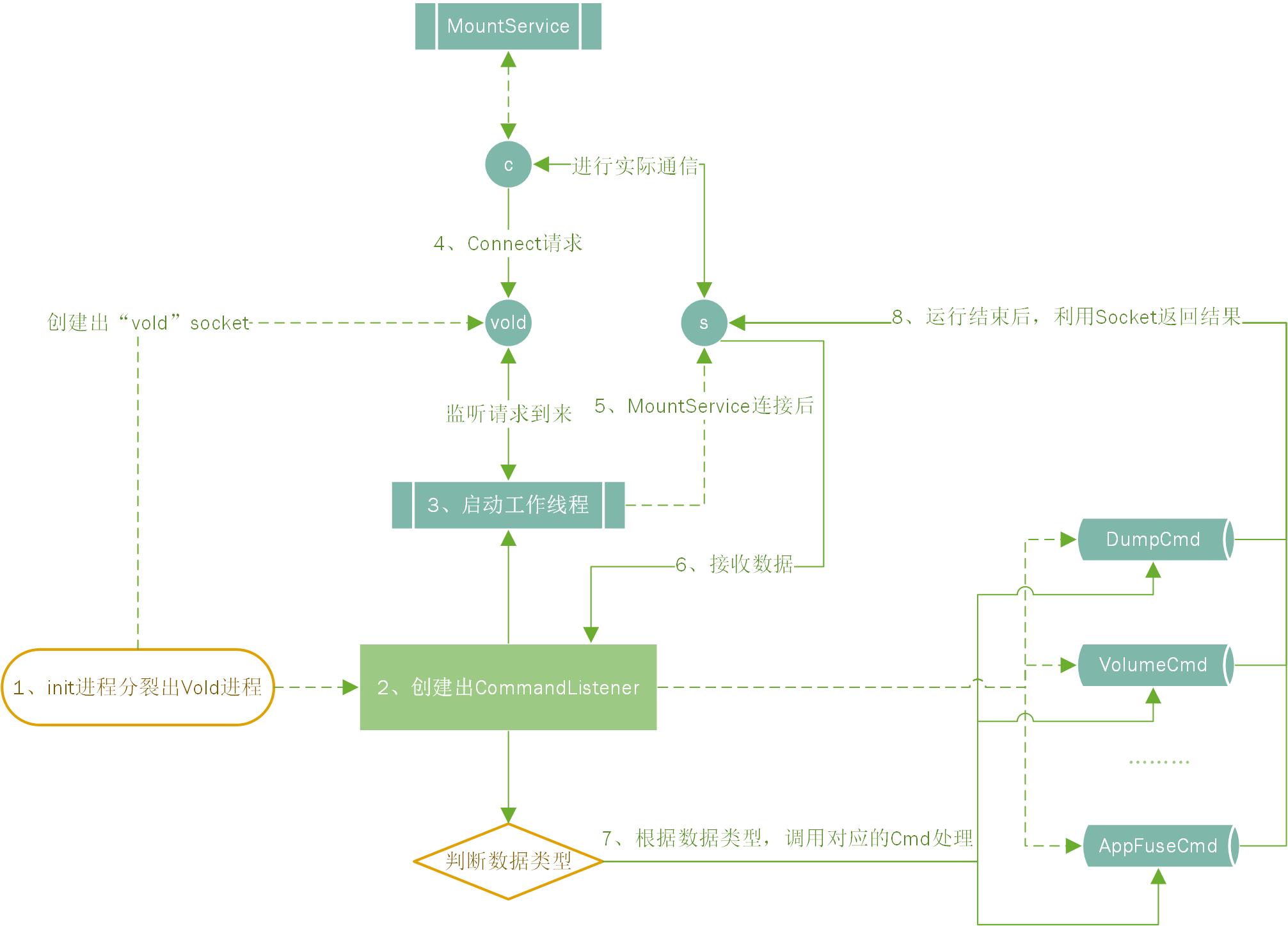
如上图所示:
1、init进程启动Vold进程时,根据vold.rc创建了”vold” socket,”vold” socket作为server端存在于Vold进程中。
2、在Vold进程的main函数中,创建出了CommandListener(部分工作尤其父类完成);CommandListener创建一些Cmd。
3、调用CommandListener的startListener函数,尤其父类SocketListener中创建出实际的工作线程,监听”vold” socket是否有请求到来。
4、框架中的MountService启动后,间接利用socket与”vold”通信(通过NativeDaemonConnector封装)。初始时,将向”vold”发送connect请求。
5、当工作线程监听到”vold”有请求到来后,利用accept函数创建出与MountService端通信的server端,即上图的s。接下来,工作线程开始监听s上是否有数据到来。
6、当工作线程监听到s有数据到来后,将数据递交给CommandListener(实际是FrameworkListener处理)。
7、CommandListener根据数据的类型,调用对应的Command进行处理。
8、实际的Cmd根据参数进行实际的操作,然后将运行结果递交给s,s再将数据通过c递交给MountService。
接下来,我们看看运行在框架层中的MountService。
4 MountService
有些应用程序需要检测外部存储卡的插入/拔出事件,这些事件由MountService通过Intent广播发送。例如外部存储卡插入后,MountService就会发送Intent.ACTION_MEDIA_MOUNTED消息。
MountService由SystemServer启动,我们简单看看它的构造函数:
class MountService extends IMountService.Stub
implements INativeDaemonConnectorCallbacks, Watchdog.Monitor {
public MountService(Context context) {
.........
mConnector = new NativeDaemonConnector(this, "vold", MAX_CONTAINERS * 2, VOLD_TAG, 25, null);
.........
mConnectorThread = new Thread(mConnector, VOLD_TAG);
..........
}
private void start() {
mConnectorThread.start();
.........
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
从MountService的启动情况来看,对于Vold进程而言,我们需要关注的就是MountService利用NativeDaemonConnector建立与”vold”的连接,使得Vold进程能够与Android框架进行沟通了。
Android中的Service启动后,基本上都是靠事件驱动的,因此无法按一个有序的流程进行全面的介绍,比较好的方式还是了解整体架构后,分析一个具体的示例。
因此接下来我们以设备插入为例,分析一下MountService的主要工作。
根据上文的分析,我们知道当设备插入后,Kernel发送消息是的NetlinkManager能够收到Uevent。然后,NetlinkManager将会构造出NetlinkEvent,并通知VolumeManager进行处理。
在VolumeManager中,利用handleBlockEvent根据事件的类型进行相应的处理,我们截取设备添加时的处理代码:
void VolumeManager::handleBlockEvent(NetlinkEvent *evt) {
........
switch (evt->getAction()) {
case NetlinkEvent::Action::kAdd: {
for (auto source : mDiskSources) {
if (source->matches(eventPath)) {
.......
auto disk = new android::vold::Disk(eventPath, device,
source->getNickname(), flags);
disk->create();
mDisks.push_back(std::shared_ptr<android::vold::Disk>(disk));
break;
}
}
break;
}
........
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
我们看看Disk的代码:
Disk::Disk(const std::string& eventPath, dev_t device,
const std::string& nickname, int flags) :
mDevice(device), mSize(-1), mNickname(nickname), mFlags(flags), mCreated(
false), mJustPartitioned(false) {
mId = StringPrintf("disk:%u,%u", major(device), minor(device));
mEventPath = eventPath;
mSysPath = StringPrintf("/sys/%s", eventPath.c_str());
mDevPath = StringPrintf("/dev/block/vold/%s", mId.c_str());
CreateDeviceNode(mDevPath, mDevice);
}
status_t Disk::create() {
CHECK(!mCreated);
mCreated = true;
notifyEvent(ResponseCode::DiskCreated, StringPrintf("%d", mFlags));
readMetadata();
readPartitions();
return OK;
}
status_t Disk::readMetadata() {
...........
notifyEvent(ResponseCode::DiskSizeChanged, StringPrintf("%" PRIu64, mSize));
notifyEvent(ResponseCode::DiskLabelChanged, mLabel);
notifyEvent(ResponseCode::DiskSysPathChanged, mSysPath);
return OK;
}
status_t Disk::readPartitions() {
.............
Table table = Table::kUnknown;
bool foundParts = false;
for (auto line : output) {
..........
if (!strcmp(token, "DISK")) {
const char* type = strtok(nullptr, kSgdiskToken);
if (!strcmp(type, "mbr")) {
table = Table::kMbr;
} else if (!strcmp(type, "gpt")) {
table = Table::kGpt;
}
} else if (!strcmp(token, "PART")) {
.........
dev_t partDevice = makedev(major(mDevice), minor(mDevice) + i);
if (table == Table::kMbr) {
........
createPublicVolume(partDevice);
........
} else if (table == Table::kGpt) {
const char* typeGuid = strtok(nullptr, kSgdiskToken);
const char* partGuid = strtok(nullptr, kSgdiskToken);
if (!strcasecmp(typeGuid, kGptBasicData)) {
createPublicVolume(partDevice);
} else if (!strcasecmp(typeGuid, kGptAndroidExpand)) {
createPrivateVolume(partDevice, partGuid);
}
}
}
}
...............
}
void Disk::createPublicVolume(dev_t device) {
auto vol = std::shared_ptr<VolumeBase>(new PublicVolume(device));
if (mJustPartitioned) {
LOG(DEBUG) << "Device just partitioned; silently formatting";
vol->setSilent(true);
vol->create();
vol->format("auto");
vol->destroy();
vol->setSilent(false);
}
mVolumes.push_back(vol);
vol->setDiskId(getId());
vol->create();
}
status_t VolumeBase::create() {
CHECK(!mCreated);
mCreated = true;
status_t res = doCreate();
notifyEvent(ResponseCode::VolumeCreated,
StringPrintf("%d \"%s\" \"%s\"", mType, mDiskId.c_str(), mPartGuid.c_str()));
setState(State::kUnmounted);
return res;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
上面列举了创建Disk和Volume的代码,注意到进行实际工作后,均会调用notifyEvent函数。
我们接下来就看看notifyEvent函数的用途:
void Disk::notifyEvent(int event, const std::string& value) {
VolumeManager::Instance()->getBroadcaster()->sendBroadcast(event,
StringPrintf("%s %s", getId().c_str(), value.c_str()).c_str(), false);
}
现在我们看看CommandListener的sendBroadcast函数(实际定义于父类的父类SocketListener中):
void SocketListener::sendBroadcast(int code, const char *msg, bool addErrno) {
SocketClientCollection safeList;
safeList.clear();
pthread_mutex_lock(&mClientsLock);
SocketClientCollection::iterator i;
for (i = mClients->begin(); i != mClients->end(); ++i) {
SocketClient* c = *i;
c->incRef();
safeList.push_back(c);
}
pthread_mutex_unlock(&mClientsLock);
while (!safeList.empty()) {
i = safeList.begin();
SocketClient* c = *i;
safeList.erase(i);
if (c->sendMsg(code, msg, addErrno, false)) {
SLOGW("Error sending broadcast (%s)", strerror(errno));
}
c->decRef();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
从上面的代码,我们知道将由MountService来处理socket中的数据。
前面我们已经知道,MountService创建NativeDaemonConnector来封装socket相关的操作,在创建NativeDaemonConnector时需要传入回调接口。当NativeDaemonConnector收到数据后,通过回调接口进行通知。
MountService继承了INativeDaemonConnectorCallbacks,我们看看它的onEvent函数:
@Override
public boolean onEvent(int code, String raw, String[] cooked) {
synchronized (mLock) {
return onEventLocked(code, raw, cooked);
}
}
private boolean onEventLocked(int code, String raw, String[] cooked) {
switch (code) {
case VoldResponseCode.DISK_CREATED: {
if (cooked.length != 3) break;
final String id = cooked[1];
int flags = Integer.parseInt(cooked[2]);
if (SystemProperties.getBoolean(StorageManager.PROP_FORCE_ADOPTABLE, false)
|| mForceAdoptable) {
flags |= DiskInfo.FLAG_ADOPTABLE;
}
mDisks.put(id, new DiskInfo(id, flags));
break;
}
...........
case VoldResponseCode.VOLUME_CREATED: {
final String id = cooked[1];
final int type = Integer.parseInt(cooked[2]);
final String diskId = TextUtils.nullIfEmpty(cooked[3]);
final String partGuid = TextUtils.nullIfEmpty(cooked[4]);
final DiskInfo disk = mDisks.get(diskId);
final VolumeInfo vol = new VolumeInfo(id, type, disk, partGuid);
mVolumes.put(id, vol);
onVolumeCreatedLocked(vol);
break;
}
...........
}
return true;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
从上面的代码可以看出,MountService收到DISK_CREATED消息后,仅会记录DiskInfo;收到VOLUME_CREATED消息后,还需要调用onVolumeCreatedLocked函数作进一步地处理。
private void onVolumeCreatedLocked(VolumeInfo vol) {
.........
if (vol.type == VolumeInfo.TYPE_EMULATED) {
.......
} else if (vol.type == VolumeInfo.TYPE_PUBLIC) {
mHandler.obtainMessage(H_VOLUME_MOUNT, vol).sendToTarget();
} else if (vol.type == VolumeInfo.TYPE_PRIVATE) {
........
} else {
.......
}
}
class MountServiceHandler extends Handler {
public MountServiceHandler(Looper looper) {
super(looper);
}
@Override
public void handleMessage(Message msg) {
switch (msg.what) {
........
final VolumeInfo vol = (VolumeInfo) msg.obj;
if (isMountDisallowed(vol)) {
Slog.i(TAG, "Ignoring mount " + vol.getId() + " due to policy");
break;
}
try {
mConnector.execute("volume", "mount", vol.id, vol.mountFlags,
vol.mountUserId);
} catch (NativeDaemonConnectorException ignored) {
}
break;
........
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
注意消息重新发回到了CommandListener,根据前面的代码的分析我们知道,在FrameworkListener中将利用dispatchCommand根据类型,调用不同Command的runCommand方法,此处将调用volumeCommand的运行方法:
int CommandListener::VolumeCmd::runCommand(SocketClient *cli,
int argc, char **argv) {
.........
else if (cmd == "mount" && argc > 2) {
std::string id(argv[2]);
auto vol = vm->findVolume(id);
if (vol == nullptr) {
return cli->sendMsg(ResponseCode::CommandSyntaxError, "Unknown volume", false);
}
int mountFlags = (argc > 3) ? atoi(argv[3]) : 0;
userid_t mountUserId = (argc > 4) ? atoi(argv[4]) : -1;
vol->setMountFlags(mountFlags);
vol->setMountUserId(mountUserId);
int res = vol->mount();
if (mountFlags & android::vold::VolumeBase::MountFlags::kPrimary) {
vm->setPrimary(vol);
}
return sendGenericOkFail(cli, res);
}
.........
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
我们跟进一下VolumeBase的mount函数:
void VolumeBase::setState(State state) {
mState = state;
notifyEvent(ResponseCode::VolumeStateChanged, StringPrintf("%d", mState));
}
在MountService的onEvent函数中,将再次处理VolumeStateChanged事件,实际上就是发送ACTION_MEDIA_MOUNTED广播。
上述的整个过程略去了大量的细节,但看起来仍很琐碎。不过,若是理解了前面介绍CommandListener时,分析的整个通信架构,那么这些流程的大致方向是比较好理解的。
结束语
Vold进程的主要内容基本上就是这些,在实际的工作中大多数人应该不会接触到这个进程。但是它整个架构是非常具有参考意义的,很清晰地阐释了Android中的框架层、Native层以及Kernel是如何交互的。Android中还有许多重要部分也采用了类似的架构,比较明显的就是netd。因此,以Vold入手进行分析,重在理解这种通信架构。























 9956
9956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









