







1.操作模式种类
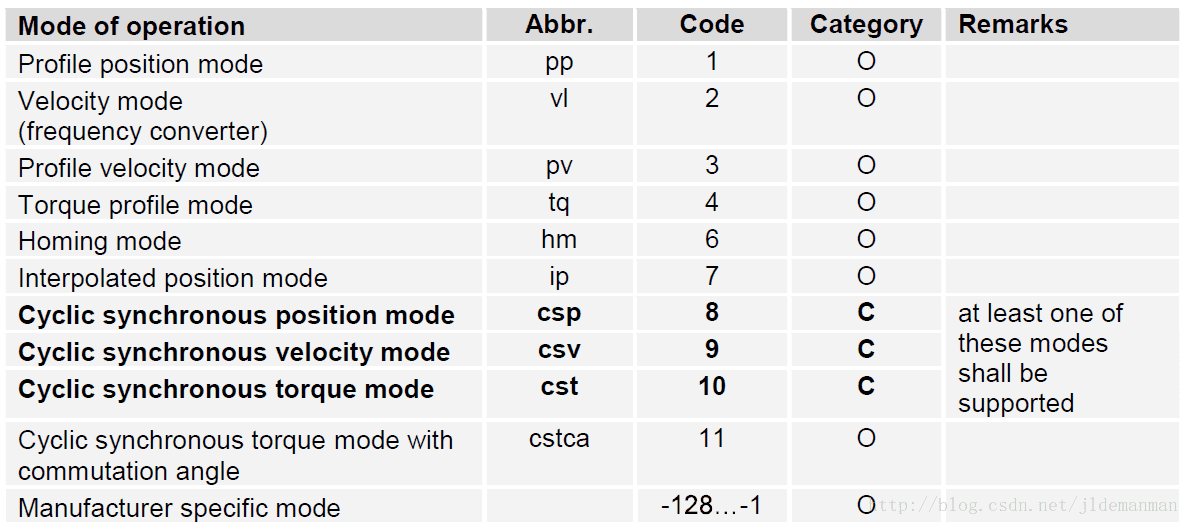
TwinCAT走伺服的操作模式基于CANopen协议,想要深入了解的可以看ETG6010,本文主要写如何走这些模式。
模式种类由下表所示:
2.Profile Position Mode
伺服从上位机接收命令后,控制伺服电机达到目标位置。
操作步骤:
a.6060h mode of operation:设置为0x01。
b.607Ah target position:设定目标位置。
c.6081h profile veocity:设定目标速度。
d.6040h controlword:依次写0x06-0x07-0x0F。
还可以通过6083h规划加速度斜率,6084h规划减速度斜率,6064h可以取得电机反馈位置,6041h可以看到驱动器状态,包括追随误差、收到命令通知和目标到达通知。
3.Profile velocity Mode
只要给速度就能走,可以规划速度加减速。
操作步骤:
a.6060h mode of operation:设置为0x03。
b.6040h controlword:依次写0x06-0x07-0x0F。
c.60FFh profile veocity:设定目标速度。
可通过6083h规划加速度斜率,6084h规划减速度斜率,6041h可以看到驱动器状态。
4.Torque profile mode
只要给转矩就能走,可以规划转矩斜率。
操作步骤:
a.6060h mode of operation:设置为0x04。
b.6040h controlword:依次写0x06-0x07-0x0F。
c.6071h profile veocity:设定目标转矩。
可通过6087h规转扭矩斜率。
5.Homing mode
可以找原点位置,可设定回归速度、加速度和回归方式。
操作步骤:
a.6060h mode of operation:设置为0x06。
b.6098h homing method:1-35(具体方式见ETG6010)
c.6040h controlword:依次写0x06-0x07-0x0F。
可通过6098h设定原点偏移,6099h设定回归速度(两种),609Ah设定回归加速度、6041h可获取驱动器状态。
6.Cyclic synchronous position mode
每一次传送PDO时,上位机都会将目标位置和控制字传送给驱动器。
a.6060h mode of operation:设置为0x08。
b.607Ah target position:设定目标位置。
c.6040h control word:设定控制字。
7.Cyclic synchronous velocity mode
每一次传送PDO时,上位机都会将目标速度和控制字传送给驱动器。
a.6060h mode of operation:设置为0x09。
b.60FFh target veocity:设定目标速度。
c.6040h control word:设定控制字。
8.Cyclic synchronous torque mode
每一次传送PDO时,上位机都会将目标转矩和控制字传送给驱动器。
a.6060h mode of operation:设置为0x10。
b.6071h target torque:设定目标转矩。
c.6040h control word:设定控制字。
9.注意事项
一般不在PDO Assignment中写入6060h,如果写入则须在PDO中赋值,不能在SDO中赋值,否则会出现6060h写不了值的情况。
PDO Assignment 中也不要重复添加Index。














 1414
1414











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









