






1、首先是把我电脑的E430装成双系统。
请教了好几位大神加上查看网上的教程。
http://jingyan.baidu.com/article/60ccbceb18624464cab197ea.html
关键点在于:
(1)首先在官网上找到Ubuntu的下载链接。我下载的是Ubuntu14.04.
(2)再下载软碟通UltraISO,用UltraISO刻录一个你准备好的U盘。
我的电脑是E430。按F1或者ESC进入BIOS的设置界面。设置U盘作为启动盘的具体方法如下:(http://www.laomaotao.org/softhelp/bios/865.html)
然后就进入了Ubuntu的安装了。
(3)注意点:设置的时候最好先设置成英文的环境,因为我不太习惯终端编译的时候出现中文的字体。如果要先设置成中文字体也行,后来需要用vi编译器改一下东西,(http://blog.chinaunix.net/uid-26495963-id-3064653.html)
也就是sudo vi /etc/default/locale
中文设置为:
LANG=”zh_CN.UTF-8”
LANGUAGE=”zh_CN:zh”
LANG=”zh_CN.UTF-8”
LANGUAGE=”zh_CN:zh”
修改为:
LANG=”en_US.UTF-8”
LANGUAGE=”en_US:en”
LANG=”en_US.UTF-8”
LANGUAGE=”en_US:en”
将相应的zh改成en,将CN改成US即可,然后需要重启生效。
这里强调的一点是你得学会用vi编译器,这个也是高博在他的新书的第一章就强调的。
这里用到的(http://wiki.dzsc.com/info/7313.html)(http://c.biancheng.net/cpp/html/2735.html)
插入文本i 删除文本x 退出编辑ESC 保存退出:wq
2、Kinect on Ubuntu上所需的essential、openni、Kinect sensor(http://www.20papercups.net/programming/kinect-on-ubuntu-with-openni/)
3、opencv2.4.13和opencv3.0.0
(1)安装一些依赖项sudo apt-get install build-essential cmake libgtk2.0-dev pkg-config python-dev python-numpy libavcodec-dev libavformat-dev libswscale-dev
(2)下载opencv的安装包
mkdir build
cd build
cmake ..
make
sudo make install
4、安装pcl
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl-all
5、安装g20
(1)安装依赖项 sudo apt-get install libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake
(2)进高博的GitHub下载依赖项libqglviewer_for_ubuntu1404.tar.gz(https://github.com/gaoxiang12/rgbd-slam-tutorial-gx)
第一个安装:libqglviewer-qt4-2_2.3.4-4ubuntu2_amd64.deb
第二个安装:libqglviewer-dev-common_2.3.4-4ubuntu2_all.deb
第三个安装:libqglviewer-qt4-dev_2.3.4-4ubuntu2_amd64.deb
一定要注意这三项的安装顺序,安装最后一个的时候
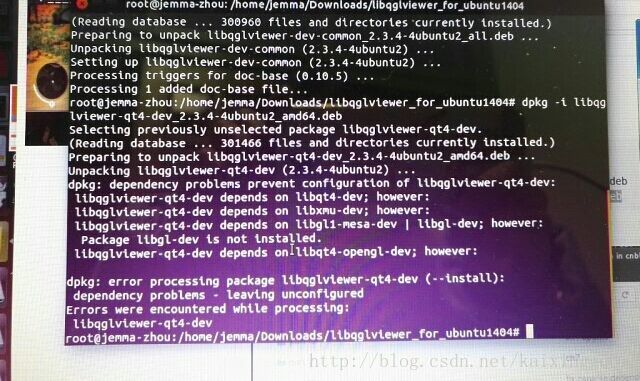
解决方法:sudo apt-get install -f 修复依赖项的问题。
(3)进高博的GitHub上下载g20 https://github.com/gaoxiang12/rgbd-slam-tutorial-gx
一样的步骤:
cd g20
mkdir build
cd build
cmake ..
make
装g20的时候一定要细心。哈哈装完了总算是开心了。
6、安装pangolin
http://www.cnblogs.com/liufuqiang/p/5618335.html
7.装完双系统之后第一次做rgbdslam_v2
参考链接https://github.com/felixendres/rgbdslam_v2/blob/indigo/README.md
因为看rgbdslam_v2的文档,他的Prerequisites是需要Ubuntu和ROS indigo的
(1)第一件事就是安装ros indigo,参考链接(http://wiki.ros.org/indigo/Installation/Ubuntu)
1.1Setup your sources.list
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
1.2Set up your keys
sudo apt-key adv –keyserver hkp://ha.pool.sks-keyservers.net –recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
1.3 安装文件之前最好先更新一下,减少后续的问题
sudo apt-get update
1.4安装ros-indigo的桌面版
sudo apt-get install ros-indigo-desktop-full
1.5初始化rosdep
sudo rosdep init
rosdep update
1.6设置环境
echo “source /opt/ros/indigo/setup.bash” >> ~/.bashrc
source ~/.bashrc
(2)新建工作空间(参考链接:http://wiki.ros.org/catkin/Tutorials/create_a_workspace)
source /opt/ros/indigo/setup.bash
mkdir -p ~/rgbdslam_catkin_ws/src
cd ~/rgbdslam_catkin_ws/src
catkin_init_workspace
cd ~/rgbdslam_catkin_ws/
catkin_make
source devel/setup.bash
(3)获得rgbdslam
cd ~/rgbdslam_catkin_ws/src
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
unzip -q indigo.zip
cd ~/rgbdslam_catkin_ws/
(4)安装
rosdep update
rosdep install rgbdslam
catkin_make
NITE的安装
http://openni.ru/openni-sdk/index.html
shadowsocks
http://blog.csdn.net/scythe666/article/details/52015213
http://gopan.xyz/136/
搜狗输入法的安装
http://pinyin.sogou.com/linux/
http://www.linuxdiyf.com/linux/20048.html
http://jingyan.baidu.com/article/9c69d48fbecf6613c8024e59.html(最后一定要看一下这个。弄了好久)
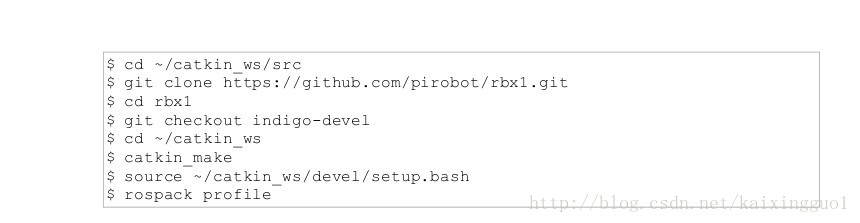
rbx
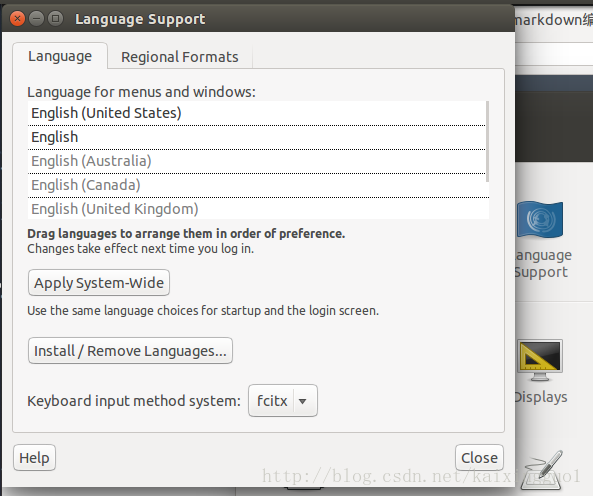
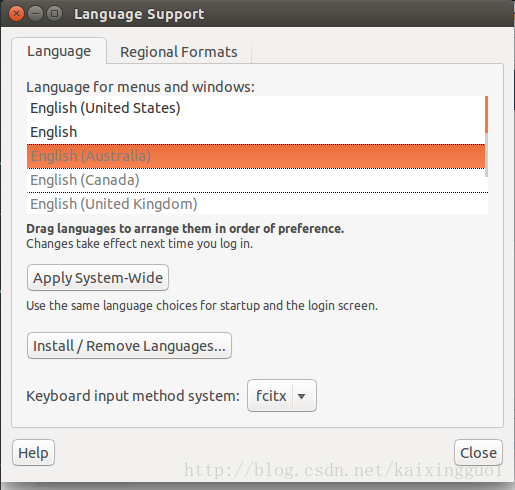
安装搜狗拼音,安装完成之后把(汉语)的这个移到上面来。重启电脑,

点击这个换成搜狗输入法之后,terminal里面也会是中文,再打开language support之后,重启。就可以设置好了。
sudo apt-get install git build-essential python libusb-1.0-0-dev freeglut3-dev openjdk-7-jdk
sudo apt-get install doxygen graphviz mono-complete
1、opennni
git clone https://github.com/OpenNI/OpenNI.git
cd OpenNI
git checkout Unstable-1.5.4.0
cd Platform/Linux/CreateRedist
chmod +x RedistMaker
./RedistMaker
cd ../Redist/OpenNI-Bin-Dev-Linux-[xxx] (where [xxx] is your architecture and this particular OpenNI release)
sudo ./install.sh
2、sensorkinect
git clone https://github.com/avin2/SensorKinect
cd SensorKinect
cd Platform/Linux/CreateRedist
chmod +x RedistMaker
./RedistMaker
cd ../Redist/Sensor-Bin-Linux-[xxx] (where [xxx] is your architecture and this particular OpenNI release)
chmod +x install.sh
sudo ./install.sh
3、test openni examples
cd OpenNI/Platform/Linux-x86/Bin/Release
./Sample-NiSimpleViewer
roslaunch is neither a launch file nor














 355
355











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









