






| 静态后处理解决方案 |
| 动态后处理解决方案 |
| 动态后处理是指将一台GPS接收机精确安装在已知点上(基准站),其它接收机安装在需要运动载体上(流动站),所有接收机同步观测4颗以上卫星,并实时记录原始观测数据。采集完成后,用专业的动态后处理软件对观测数据进行处理,从而得到运动载体在每个时刻对应的高精度位置。根据具体配置和使用方式的不同,这种模式一般可以达到厘米或分米级的定位精度。 方案配置
方案说明 |
| GPS实时差分定位解决方案 |
| 实时差分定位是指在测量点上实时得到高精度的定位结果。这种模式的具体方法是:在一个已知测站上架设GPS基准站接收机和数据电台,连续跟踪所有可见卫星,并通过数据电台向移动站发送差分改正数据。移动站接收机通过移动站数据电台接收基准站发射来的差分改正数据,并在移动站接收机内部进行处理,从而实时得到移动站的高精度位置。 配 置
方案说明 |
| GPS目标指示系统 |
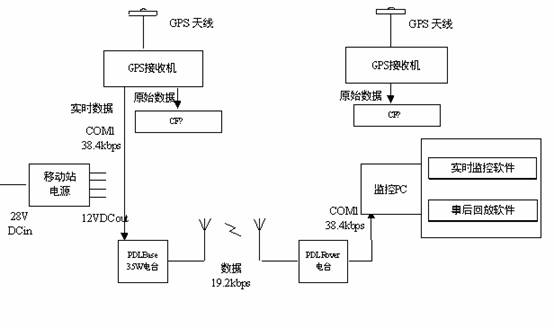
| GPS目标指示系统是为了对雷达测距、测向的准确性进行考核。系统利用NovAtel GPS接收机测量飞行目标位置、速度和时间等信息;并通过电台回传到地面的监控计算机,地面监控计算机运行实时监控软件和事后回放软件,解算出飞行目标的经度、纬度、相对高度、速度、航路捷径、高低角、方位角、斜距、时间等参数;软件运行于Windows2000/XP环境;实时监控软件用于对飞行目标参数数据实时显示和存贮,事后回放软件用于对实时监控软件记录的数据进行数据回放分析。 系统总体结构 1、系统组成及工作原理 该系统由基准站分系统、移动站分系统组成,由GPS接收机、数传电台、计算机、电源模块等硬件和相关软件组成(参见图1)。
图1 GPS目标指示系统原理框图
1.2工作原理 实验过程中,基准GPS接收机和移动GPS接收机原始数据以20Hz存入两个接收机自带的256MCF卡内,飞行实验结束后,可读出CF卡中的数据,用Grafnav/net软件进行高精度的事后处理。 1.3软件功能介绍 * 基准站实时监控软件 |














 2338
2338











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









