






一、线程同步
同步就是协同步调,按预定的先后次序进行运行。如:你说完,我再说。“同”字从字面上容易理解为一起动作,其实不是,“同”字应是指协同、协助、互相配合。
如进程、线程同步,可理解为进程或线程A和B一块配合,A执行到一定程度时要依靠B的某个结果,于是停下来,示意B运行;B依言执行,再将结果给A,A再继续操作。
在多线程编程里面,一些敏感数据不允许被多个线程同时访问,此时就使用同步访问技术,保证数据在任何时刻,最多有一个线程访问,以保证数据的完整性。
注意:同一个进程内存的多个线程之间,除了栈内存是独立的,其他资源全部共享。
#include <stdio.h>
#include <pthread.h>
int num = 0;
void* run(void* arg)
{
for(int i=0; i<1000000; i++)
{
// 加锁
num++;
// 解锁
}
}
int main(int argc,const char* argv[])
{
pthread_t tid1,tid2;
pthread_create(&tid1,NULL,run,NULL);
pthread_create(&tid2,NULL,run,NULL);
pthread_join(tid1,NULL);
pthread_join(tid2,NULL);
printf("%d\n",num);
}线程A 线程B
读取
运算 读取
回写 运算
回写
二、互斥锁
注意:如果man手册中查不到这系列函数,可以安装以下内容:
sudo apt-get install glibc-doc
sudo apt-get install manpages-posix-dev
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
功能:定义并初始化互斥锁
int pthread_mutex_init (pthread_mutex_t* mutex,const pthread_mutexattr_t* mutexattr);
功能:初始化一互斥锁,会被初始化为非锁定状态
int pthread_mutex_lock (pthread_mutex_t* mutex);
功能:加锁,当互斥锁已经是锁定状态时,调用者会阻塞,直到互斥被解开,当前线程才会加锁成功并返回。
int pthread_mutex_unlock (pthread_mutex_t* mutex);
功能:解锁,解锁后等待加锁的线程才能加锁成功。
int pthread_mutex_destroy (pthread_mutex_t* mutex);
功能:销毁锁
int pthread_mutex_trylock (pthread_mutex_t *__mutex)
功能:加测试锁,如果不加锁刚立即返回
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex,
const struct timespec *restrict abs_timeout);
功能:倒计时加锁,如果超时还不加上则立即返回。
struct timespec{
time_t tv_sec; /* Seconds. */
long int tv_nsec; /* Nanoseconds.*/ 1秒= 1000000000 纳秒
};#include <stdio.h>
#include <pthread.h>
/*
执行流程:
1、互斥锁被初始化为非锁定状态
2、线程1调用pthread_mutex_lock函数,立即返回,互斥量呈锁定状态;
3、线程2调用pthread_mutex_lock函数,阻塞等待;
4、线程1调用pthread_mutex_unlock函数,互斥量呈非锁定状态;
5、线程2被唤醒,从pthread_mutex_lock函数中返回,互斥量呈锁定状态
*/
pthread_mutex_t mutex;
//pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int num = 0;
void* run(void* arg)
{
for(int i=0; i<1000000; i++)
{
pthread_mutex_lock(&mutex);
num++;
pthread_mutex_unlock(&mutex);
}
}
int main(int argc,const char* argv[])
{
pthread_mutex_init(&mutex,NULL);
pthread_t pid1,pid2;
pthread_create(&pid1,NULL,run,NULL);
pthread_create(&pid2,NULL,run,NULL);
pthread_join(pid1,NULL);
pthread_join(pid2,NULL);
pthread_mutex_destroy(&mutex);
printf("%d\n",num);
}三、读写锁
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
功能:定义并初始化读写锁
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
功能:初始化读写锁
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
功能:加读锁,如果不能加则阻塞等待
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
功能:加写锁,如果不能加则阻塞等待
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
功能:解读写锁。
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
功能:尝试加读锁,如果不能加则立即返回
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
功能:尝试加写锁,如果不能加则立即返回
int pthread_rwlock_timedrdlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict abstime);
功能:带倒计时加读锁,超时则立即返回
int pthread_rwlock_timedwrlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict abstime);
功能:带倒计时加写锁,超时则立即返回
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
功能:销毁读写锁
使用读写锁的线程应根据后续的操作进行加锁,如果只对数据进行读取则只加读锁即可,只有对数据进行修改时才应该加写锁,与互斥锁的区别是,它能让只读的线程加上锁,使用原理与文件锁一样。线程A 线程B 读锁 读锁 OK 读锁 写锁 NO 写锁 读锁 NO 写锁 写锁 NO
练习:使用读写锁来解决同步问题。
#include <stdio.h>
#include <pthread.h>
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
int num = 0;
void* run(void* arg)
{
for(int i=0; i<1000000; i++)
{
pthread_rwlock_wrlock(&rwlock);
num++;
pthread_rwlock_unlock(&rwlock);
}
}
int main(int argc,const char* argv[])
{
pthread_t tid1,tid2;
pthread_create(&tid1,NULL,run,NULL);
pthread_create(&tid2,NULL,run,NULL);
pthread_join(tid1,NULL);
pthread_join(tid2,NULL);
pthread_rwlock_destroy(&rwlock);
printf("%d\n",num);
}四、死锁问题
什么是死锁:
多个线程互相等待对方资源,在得到所需要的资源之前都不会释放自己的资源,然后造成循环等待的现象,称为死锁。
死锁产生四大必要条件:
1、资源互斥
2、占有且等待
3、资源不可剥夺
4、环路等待
以上四个条件缺一不可,只要有一个不满足就不能构成死锁。
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
// 创建三个互斥锁并初始化
pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t mutex2 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t mutex3 = PTHREAD_MUTEX_INITIALIZER;
void* run1(void* arg)
{
pthread_mutex_lock(&mutex1);
usleep(100);
pthread_mutex_lock(&mutex2);
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
}
void* run2(void* arg)
{
pthread_mutex_lock(&mutex2);
usleep(100);
pthread_mutex_lock(&mutex3);
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex3);
pthread_mutex_unlock(&mutex2);
}
void* run3(void* arg)
{
pthread_mutex_lock(&mutex3);
usleep(100);
pthread_mutex_lock(&mutex1);
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex3);
}
int main(int argc,const char* argv[])
{
// 创建三个线程
pthread_t tid1,tid2,tid3;
pthread_create(&tid1,NULL,run1,NULL);
pthread_create(&tid2,NULL,run2,NULL);
pthread_create(&tid3,NULL,run3,NULL);
// 主线程等待三个子线程结束
pthread_join(tid1,NULL);
pthread_join(tid2,NULL);
pthread_join(tid3,NULL);
return 0;
}如休防止出现死锁:
构成死锁的四个条件只有一个不成立,就不会产生死锁了。
1、破坏互斥条件,让资源能够共享使用(准备多份)。
2、破坏占有且等待的条件,一次申请完成它所有需要的资源(把所有资源进行打包,用一把锁来代表,拿到这反锁就相当于拿到的所有资源),资源没有满足前不让它运行,一旦开始运行就一直归它所有, 缺点是系统资源会被浪费。
3、破坏不可剥夺的条件,当已经占有了一些资源,请求新的资源而获取不到,然后就释放已经获取到的资源,缺点是实现起来比较复杂,释放已经获取到的资源可能会造成前一阶段的工作浪费。
4、破坏循环等待的条件,采用顺序分配资源的方法,在系统中为资源进行编号,规定线程必须按照编号递增的顺序获取资源,缺点是资源必须相对稳定,这样就限制了资源的增加和减少。
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
// 创建三个互斥锁并初始化
pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t mutex2 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t mutex3 = PTHREAD_MUTEX_INITIALIZER;
void* run1(void* arg)
{
while(1)
{
pthread_mutex_lock(&mutex1);
usleep(100);
if(0 == pthread_mutex_trylock(&mutex2))
break;
pthread_mutex_unlock(&mutex1);
}
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
}
void* run2(void* arg)
{
while(1)
{
pthread_mutex_lock(&mutex2);
usleep(100);
if(0 == pthread_mutex_trylock(&mutex3))
break;
pthread_mutex_unlock(&mutex2);
}
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex3);
pthread_mutex_unlock(&mutex2);
}
void* run3(void* arg)
{
while(1)
{
pthread_mutex_lock(&mutex3);
usleep(100);
if(0 == pthread_mutex_trylock(&mutex1))
break;
pthread_mutex_unlock(&mutex3);
}
printf("没有构成死锁!!!\n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex3);
}
int main(int argc,const char* argv[])
{
// 创建三个线程
pthread_t tid1,tid2,tid3;
pthread_create(&tid1,NULL,run1,NULL);
pthread_create(&tid2,NULL,run2,NULL);
pthread_create(&tid3,NULL,run3,NULL);
// 主线程等待三个子线程结束
pthread_join(tid1,NULL);
pthread_join(tid2,NULL);
pthread_join(tid3,NULL);
return 0;
}检测死锁的方法:
总体思路:观察+分析
方法1:阅读代码,分析各线程的加锁步骤。
方法2:使用strace追踪程序的执行流程。
方法3:查看日志观察程序的业务执行过程。
方法4:使用gdb调试,查看各线程的执行情况。
1、把断点打在线程创建完毕后
2、run
3、info threads 查看所有线程
4、thread n 进程指定的线程
5、bt 查看线程堆栈信息
6、配合s/n单步调试什么是死锁?
构成死锁的4个必要条件?
如何避免死锁?
如何判断程序是否陷入死锁?
五、原子操作
所谓的原子操作就是不可被拆分的操作,对于多线程对全局变量进行操作时,就再也不用再线程锁了,和pthread_mutex_t保护作用是一样的,也是线程安全的,有些编译器在使用时需要加-march=i686编译参数。
type __sync_fetch_and_add (type *ptr, type value); // +
type __sync_fetch_and_sub (type *ptr, type value); // -
type __sync_fetch_and_and (type *ptr, type value); // &
type __sync_fetch_and_or (type *ptr, type value); // |
type __sync_fetch_and_nand (type *ptr, type value); // ~
type __sync_fetch_and_xor (type *ptr, type value); // ^
功能:以上操作返回的是*ptr的旧值
type __sync_add_and_fetch (type *ptr, type value); // +
type __sync_sub_and_fetch (type *ptr, type value); // -
type __sync_and_and_fetch (type *ptr, type value); // &
type __sync_or_and_fetch (type *ptr, type value); // |
type __sync_nand_and_fetch (type *ptr, type value); // ~
type __sync_xor_and_fetch (type *ptr, type value); // ^
功能:以上操作返回的是*ptr与value计算后的值
type __sync_lock_test_and_set (type *ptr, type value);
功能:把value赋值给*ptr,并返回*ptr的旧值
__sync_lock_release(type *ptr);
功能:将*ptr赋值为0#include <stdio.h>
#include <pthread.h>
int num = 0;
void* run(void* arg)
{
for(int i=0; i<100000000; i++)
{
__sync_fetch_and_add(&num,1);
}
}
int main(int argc,const char* argv[])
{
pthread_t pid1,pid2;
pthread_create(&pid1,NULL,run,NULL);
pthread_create(&pid2,NULL,run,NULL);
pthread_join(pid1,NULL);
pthread_join(pid2,NULL);
printf("%d\n",num);
}原子操作的优点:
1、速度贼快
2、不会产生死锁
原子操作的缺点:
1、该功能并不通用,有些编译器不支持。
2、type只能是整数相关的类型,浮点型和自定义类型无法使用。
练习1:
使用读写锁或互斥锁实现一个线程安全队列。
#include "queue.h"
#include <stdlib.h>
Node* create_node(TYPE data)
{
Node* node = malloc(sizeof(Node));
node->data = data;
node->next = NULL;
return node;
}
Queue* create_queue(void)
{
Queue* queue = malloc(sizeof(Queue));
pthread_rwlock_init(&queue->lock,NULL);
queue->front = NULL;
queue->rear = NULL;
return queue;
}
bool empty_queue(Queue* queue)
{
pthread_rwlock_rdlock(&queue->lock);
bool flag = NULL == queue->front;
pthread_rwlock_unlock(&queue->lock);
return flag;
}
void push_queue(Queue* queue,TYPE data)
{
Node* node = create_node(data);
if(empty_queue(queue))
{
pthread_rwlock_wrlock(&queue->lock);
queue->front = node;
queue->rear = node;
}
else
{
pthread_rwlock_wrlock(&queue->lock);
queue->rear->next = node;
queue->rear = node;
}
pthread_rwlock_unlock(&queue->lock);
}
bool pop_queue(Queue* queue)
{
if(empty_queue(queue))
return false;
pthread_rwlock_wrlock(&queue->lock);
Node* tmp = queue->front;
queue->front = tmp->next;
pthread_rwlock_unlock(&queue->lock);
free(tmp);
return true;
}
TYPE top_queue(Queue* queue)
{
pthread_rwlock_rdlock(&queue->lock);
TYPE data = queue->front->data;
pthread_rwlock_unlock(&queue->lock);
return data;
}
void destroy_queue(Queue* queue)
{
while(!empty_queue(queue))
pop_queue(queue);
pthread_rwlock_destroy(&queue->lock);
free(queue);
}
int main(void)
{
Queue* queue = create_queue();
for(int i=0; i<10; i++)
{
push_queue(queue,i);
printf("push %d\n",i);
}
while(!empty_queue(queue))
{
printf("top %d\n",top_queue(queue));
pop_queue(queue);
}
}练习2:
使用原子操作实现一个线程安全的无锁队列。
//queue->rear = (queue->rear+1)%queue->cap;
if(queue->rear == queue->cap)
{
queue->rear = 0;
}
else
{
__sync_fetch_and_add(&queue->rear,1);
}
queue->front = (queue->front+1)%queue->cap;
if(queue->front == queue->cap)
{
queue->front = 0;
}
else
{
__sync_fetch_and_add(&queue->front,1);
}六、生产者与消费者模型
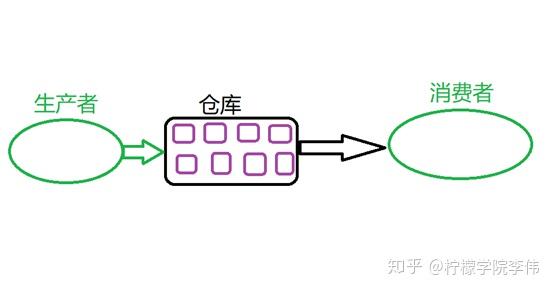
生产者:生产数据的线程,这类的线程负责从用户端、客户端接收数据,然后把数据Push到存储中介。
消费者:负责消耗数据的线程,对生产者线程生产的数据进行(判断、筛选、使用、响应、存储)处理。
存储中介:也叫数据仓库,是生产者线程与消费者线程之间的数据缓冲区,用于平衡二者之间的生产速度与消耗速度不均衡的问题,通过缓冲区隔离生产者和消费者,与二者直连相比,避免相互等待,提高运行效率。
问题1:生产快于消费,缓冲区满,撑死。
解决方法:负责生产的线程通知负责消费的线程全速消费,然后进入休眠。
问题2:消费快于生产,缓冲区空,饿死。
解决方法:负责消费的线程通知负责生产的线程全速生产,然后进入休眠。
七、条件变量
条件变量是利用线程间共享的"全局变量"进行同步的一种机制,主要包括两个动作:
1、线程等待"条件变量的条件成立"而休眠;
2、等"条件成立"叫醒休眠的线程。
为了防止竞争,条件变量的使用总是和一个互斥锁结合在一起,一般线程睡入条件变量,伴随着解锁动作,而线程从条件变量醒来时,伴随着加锁动作,如果加锁失败线程进入阻塞状态,而不是睡眠。
// 定义或创建条件变量
pthread_cond_t cond;
// 初始化条件变量
int pthread_cond_init (pthread_cond_t* cond,const pthread_condattr_t* attr);
//亦可pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
// 使调用线程睡入条件变量cond,同时释放互斥锁mutex
int pthread_cond_wait (pthread_cond_t* cond,pthread_mutex_t* mutex);
// 带倒计时的睡眠,时间到了会自动醒来
int pthread_cond_timedwait (pthread_cond_t* cond,
pthread_mutex_t* mutex,
const struct timespec* abstime);
struct timespec {
time_t tv_sec; // Seconds
long tv_nsec; // Nanoseconds [0 - 999999999]
};
// 从条件变量cond中叫醒一个线程,令其重新获得原先的互斥锁
int pthread_cond_signal (pthread_cond_t* cond);
注意:被唤出的线程此刻将从pthread_cond_wait函数中返回,
但如果该线程无法获得原先的锁,则会继续阻塞在加锁上。
// 从条件变量cond中唤醒所有线程
int pthread_cond_broadcast (pthread_cond_t* cond);
// 销毁条件变量
int pthread_cond_destroy (pthread_cond_t* cond);注意:使用互斥锁配合条件变量实现的生产者与消费者模型,能够平衡生产与消费的时间不协调,并且可以最大限度的节约运行资源。
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
void* run(void* arg)
{
int index = 1;
for(;;)
{
pthread_mutex_lock(&mutex);
if(0 == index % 10)
{
printf("任务已完成,即将睡眠!\n");
pthread_cond_wait(&cond,&mutex);
}
printf("index = %d\n",index++);
sleep(1);
pthread_mutex_unlock(&mutex);
}
}
int main(int argc,const char* argv[])
{
pthread_t tid;
pthread_create(&tid,NULL,run,NULL);
printf("是否叫醒睡眠的线程?");
for(;;)
{
char cmd = getchar();
if('y' == cmd)
{
pthread_cond_signal(&cond);
}
}
pthread_join(tid,NULL);
return 0;
}八、信号量
多线程使用的信号量:
#include <semaphore.h>
sem_t sem;
int sem_init(sem_t *sem, int pshared, unsigned int value);
功能:给信号量设置初始值
pshared:信号量的使用范围
0 线程间使用
nonzero 进程之间使用
int sem_wait(sem_t *sem);
功能:信号量减1操作,如果信号量已经等于0,则阻塞
int sem_trywait(sem_t *sem);
功能:尝试对信号量减1操作,能减返回0成功,不能减返回-1失败,不会阻塞
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
功能:带倒计时的对信号减1操作,能减返回0成功,不能减超时返回-1失败,阻塞abs_timeout一段时间
int sem_post(sem_t *sem);
功能:对信号量执行加1操作
int sem_getvalue(sem_t *sem, int *sval);
功能:获取信号量的值
int sem_destroy(sem_t *sem);
功能:销毁信号量多进程使用的信号量:
sem_t *sem_open(const char *name, int oflag,mode_t mode, unsigned int value);
功能:在内核创建一个信号量对象
name:信号量的名字
oflag:
O_CREAT 不存在则创建信号量,存在则获取
O_EXCL 如果信号量已经存在,返回失败
mode:信号量的权限
value:信号量的初始值
sem_t *sem_open(const char *name, int oflag);
功能:获取信号,或相关属性
int sem_unlink(const char *name);
功能:删除信号量














 964
964

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









