






作为老司机,大家有没有想过为什么高德导航到红绿灯路口时能显示红绿灯的读秒计时?是什么原理实现的?有什么黑科技?

今天针对针对这个问题,带大家一起探讨一下

内部消息
据内部员工透露的消息,他们每天工作其实就是负责自己片区的红绿灯,一大早就去各个路口校对时间,然后发布到系统后台。是的,统计出来的,而且还是人工统计,所以难免会有误差,遇到误差的时候还请大家多多包含

他们真的是太辛苦了!但还是希望他们在记录的时候一定要好好记,别弄错了,因为在有的路口真的不准!



真正的内幕
99% 算法 + 1%交管数据合作接入
这也能算出来?是的,不要怀疑算法的边界,而且不仅红绿灯倒计时推测上了,现在还支持了建议时速的绿波带通过功能。
这就是大数据的魅力!大数据让出行更美好,接下来也会让出行更安全!
不仅红绿灯倒计时,连等待轮数都是计算得到的
有用户惊叹:
“这是什么黑科技?高德是怎么知道前面路口红灯还有多少时长的?”
也有观点认为,高德地图是跟交管部门合作,接入了所在城市红绿灯的数据,因此才实现了红灯计时读秒的功能。
但事实上,红绿灯倒计时功能的落地,并非接入现实中的红绿灯数据那般直接简单,而是高德地图多年来在交通领域深耕创新,算力进化的成果——用户在高德地图中看到的红灯倒计时,以及红灯等待轮数,都是“算”出来的结果。
人家甚至还有对应的专利:
CN114463969A
发明名称:红绿灯周期时长的挖掘方法、电子设备及计算机程序产品
申请人:高德软件公司
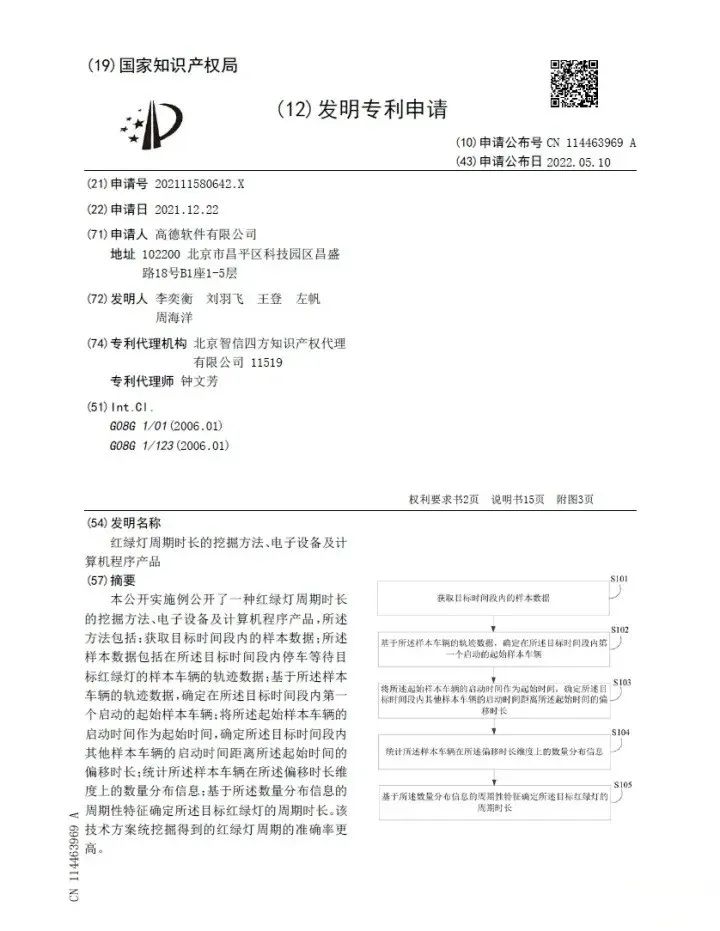
发明专利
粗略阅读后,感觉确实可以通过此算法确定红绿灯的周期 ,那么实现红绿灯倒计时还需要确定当前时刻距一个红绿灯周期开始的时间,这个问题或许可以利用开启导航车辆的实时启停信息实现?
推荐阅读:如何加入北京外地车主群

















 4486
4486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









