








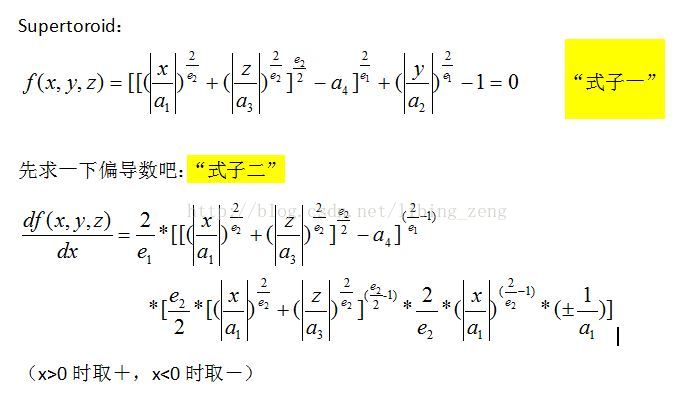
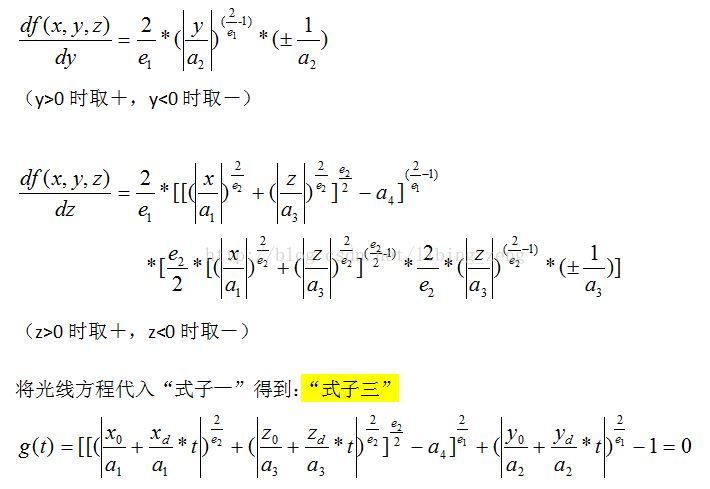
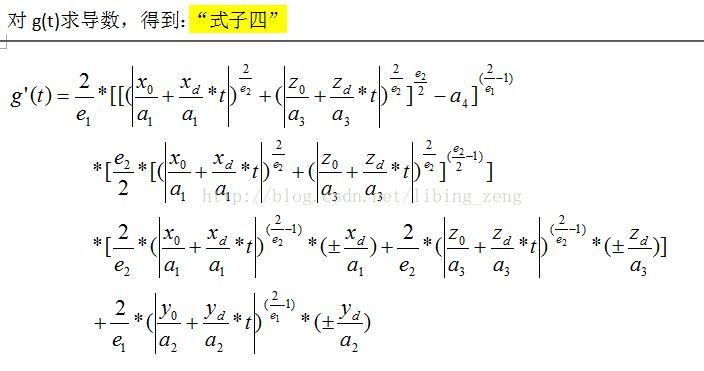
49.1 数学推导
49.2 看C++代码实现
----------------------------------------------supertoroid.h ------------------------------------------
supertoroid.h
#ifndef SUPERTOROID_H
#define SUPERTOROID_H
#include <hitable.h>
#include "material.h"
#include "log.h"
class supertoroid : public hitable
{
public:
supertoroid() {}
supertoroid(vec3 cen, float a1, float a2, float a3, float a4, float e1, float e2, int in, float tol, material *m) :
center(cen), intercept_x(a1), intercept_y(a2), intercept_z(a3), radius(a4), p_e1(e1), p_e2(e2),
initial_number(in), tolerance(tol), ma(m) {}
/*
f(x,y,z)=(( (x/a1)^(2/e2) + (z/a3)^(2/e2) )^(e2/2) - a4)^(2/e1) + (y/a2)^(2/e1) -1 = 0
a4=R/sqrt(a1*a1+a2*a2), R is the torus radius.
in: initial number
tol: tolerance
*/
virtual bool hit(const ray& r, float tmin, float tmax, hit_record& rec) const;
vec3 center;
float intercept_x, intercept_y, intercept_z, radius;
float p_e1, p_e2;
int initial_number;
float tolerance;
material *ma;
};
#endif // SUPERTOROID_H
----------------------------------------------supertoroid.cpp ------------------------------------------
supertoroid.cpp
#include "supertoroid.h"
#include <iostream>
#include <limits>
#include "float.h"
#include "log.h"
using namespace std;
bool ray_hit_box_t(const ray& r, const vec3& vertex_l, const vec3& vertex_h, float& t_near, float& t_far) {
/*光线撞击包围超级圆环的box,得到t_near, t_far*/
t_near = (numeric_limits<float>::min)();
t_far = (numeric_limits<float>::max)();
vec3 direction = r.direction();
vec3 origin = r.origin();
vec3 bl = vertex_l;
vec3 bh = vertex_h;
float array1[6];
if(direction.x() == 0) {
if((origin.x() < bl.x()) || (origin.x() > bh.x())) {
#if SUPERTOROID_LOG == 1
std::cout << "the ray is parallel to the planes and the origin X0 is not between the slabs. return false" <<endl;
#endif // SUPERTOROID_LOG
return false;
}
array1[0] = (numeric_limits<float>::min)();
array1[1] = (numeric_limits<float>::max)();
}
if(direction.y() == 0) {
if((origin.y() < bl.y()) || (origin.y() > bh.y())) {
#if SUPERTOROID_LOG == 1
std::cout << "the ray is parallel to the planes and the origin Y0 is not between the slabs. return false" <<endl;
#endif // SUPERTOROID_LOG
return false;
}
array1[2] = (numeric_limits<float>::min)();
array1[3] = (numeric_limits<float>::max)();
}
if(direction.z() == 0) {
if((origin.z() < bl.z()) || (origin.z() > bh.z())) {
#if SUPERTOROID_LOG == 1
std::cout << "the ray is parallel to the planes and the origin Z0 is not between the slabs. return false" <<endl;
#endif // SUPERTOROID_LOG
return false;
}
array1[4] = (numeric_limits<float>::min)();
array1[5] = (numeric_limits<float>::max)();
}
if((direction.x() != 0) && (direction.y() != 0) && (direction.z() != 0)) {
array1[0] = (bl.x()-origin.x())/direction.x();
array1[1] = (bh.x()-origin.x())/direction.x();
array1[2] = (bl.y()-origin.y())/direction.y();
array1[3] = (bh.y()-origin.y())/direction.y();
array1[4] = (bl.z()-origin.z())/direction.z();
array1[5] = (bh.z()-origin.z())/direction.z();
}
for (int i=0; i<6; i=i+2){
if(array1[i] > array1[i+1]) {
float t = array1[i];
array1[i] = array1[i+1];
array1[i+1] = t;
}
#if SUPERTOROID_LOG == 1
std::cout << "array1[" << i << "]:" << array1[i] <<endl;
std::cout << "array1[" << i+1 << "]:" << array1[i+1] <<endl;
#endif // SUPERTOROID_LOG
if(array1[i] >= t_near) {t_near = array1[i];}
if(array1[i+1] <= t_far) {t_far = array1[i+1];}
if(t_near > t_far) {
#if SUPERTOROID_LOG == 1
std::cout << "No.(0=X;2=Y;4=Z):" << i << " :t_near > t_far. return false" <<endl;
#endif // SUPERTOROID_LOG
return false;
}
if(t_far < 0) {
#if SUPERTOROID_LOG == 1
std::cout << "No.(0=X;2=Y;4=Z):" << i << " :t_far < 0. return false" <<endl;
#endif // SUPERTOROID_LOG
return false;
}
}
if (t_near != t_near) {
t_near = t_near * 1;
}
return true;
}
bool get_superellipsoid_function_and_derivative_t(float a1, float a2, float a3, float a4, float e1, float e2, float xo, float yo, float zo, float xd, float yd, float zd, double t, double& f, double& fd) {
/*求函数值和函数导数值*/
double a1_r = double(a1);
double a2_r = double(a2);
double a3_r = double(a3);
double a4_r = double(a4);
double e1_r = double(e1);
double e2_r = double(e2);
double xo_r = double(xo);
double yo_r = double(yo);
double zo_r = double(zo);
double xd_r = double(xd);
double yd_r = double(yd);
double zd_r = double(zd);
double pow_x, pow_y, pow_z, pow_x_d, pow_y_d, pow_z_d, pow_x_z, pow_x_z_d, pow_x_z_a4, pow_x_z_a4_d;
double xd_a1, yd_a2, zd_a3;
if ((xo_r+xd_r*t) < 0) {
xd_a1 = -xd_r/a1_r;
}
else {
xd_a1 = xd_r/a1_r;
}
if ((yo_r+yd_r*t) < 0) {
yd_a2 = -yd_r/a2_r;
}
else {
yd_a2 = yd_r/a2_r;
}
if ((zo_r+zd_r*t) < 0) {
zd_a3 = -zd_r/a3_r;
}
else {
zd_a3 = zd_r/a3_r;
}
if ((xo_r+xd_r*t) == 0) {
pow_x = 0;
pow_x_d = 0;
}
else {
pow_x = pow(fabs(xo_r/a1_r + xd_r*t/a1_r), (2/e2_r));
pow_x_d = pow(fabs(xo_r/a1_r + xd_r*t/a1_r), ((2/e2_r)-1));
}
if ((yo_r+yd_r*t) == 0) {
pow_y = 0;
pow_y_d = 0;
}
else {
pow_y = pow(fabs(yo_r/a2_r + yd_r*t/a2_r), (2/e1_r));
pow_y_d = pow(fabs(yo_r/a2_r + yd_r*t/a2_r), ((2/e1_r)-1));
}
if ((zo_r+zd_r*t) == 0) {
pow_z = 0;
pow_z_d = 0;
}
else {
pow_z = pow(fabs(zo_r/a3_r + zd_r*t/a3_r), (2/e2_r));
pow_z_d = pow(fabs(zo_r/a3_r + zd_r*t/a3_r), ((2/e2_r)-1));
}
if ((pow_x+pow_z) == 0) {
pow_x_z = 0;
pow_x_z_d = 0;
}
else {
pow_x_z = pow(pow_x+pow_z, (e2_r/2));
pow_x_z_d = pow(pow_x+pow_z, (e2_r/2)-1);
}
if ((pow_x_z-a4_r) == 0) {
pow_x_z_a4 = 0;
pow_x_z_a4_d = 0;
}
else {
pow_x_z_a4 = pow(fabs(pow_x_z-a4_r), (2/e1_r));
pow_x_z_a4_d = pow(fabs(pow_x_z-a4_r), (2/e1_r)-1);
}
/*如上对幂函数的基数取了绝对值。实际情况,基数可正可负,对于不同的指数,幂函数的奇偶性不同,所以,为了计算方便,在此取其绝对值。这种做法的结果和真实情况是有出入的。*/
f = pow_x_z_a4+pow_y - 1;
fd = (2/e1_r)*(pow_x_z_a4_d*pow_x_z_d
*(pow_x_d*xd_a1+pow_z_d*zd_a3)+pow_y_d*yd_a2);
return true;
}
bool get_roots_by_newton_iteration_t(const ray& r, vec3 c, float a1, float a2, float a3, float a4, float e1, float e2, int in, float tol, float *x0, float (&roots)[2]) {
/*牛顿迭代*/
float xo = r.origin().x() - c.x();
float yo = r.origin().y() - c.y();
float zo = r.origin().z() - c.z();
float xd = r.direction().x();
float yd = r.direction().y();
float zd = r.direction().z();
double t_k, t_k1, ft_k, ft_d_k;
int j=0, in_r;
if (in > int(x0[0])) {
in_r = int(x0[0]);
}
else {
in_r = in;
}
for (int i=1; i<in_r; i++) {
t_k = double(x0[i]);
for (int k=0; k<50; k++) {
if (!(isnan(t_k))) {
get_superellipsoid_function_and_derivative_t(a1, a2, a3, a4, e1, e2, xo, yo, zo, xd, yd, zd, t_k, ft_k, ft_d_k);
if ((ft_d_k != 0) && !(isnan(ft_k)) && !(isnan(ft_d_k))) {
t_k1 = t_k - ft_k/ft_d_k;
// if (fabs(t_k1) >= 1) {
if (fabs((t_k1 - t_k)/t_k1) < tol) {
if ((t_k1 >= x0[1]) && (t_k1 <= x0[in_r])) {
roots[j+1] = float(t_k1);
j++;
break;
}
else {
break;
}
}
else {
t_k = t_k1;
}
/*
}
else {
if (fabs(t_k1 - t_k) < tol) {
roots[j+1] = float(t_k1);
j++;
break;
}
else {
t_k = t_k1;
}
}
*/
}
else {
break;
}
}
else {
break;
}
}
if (j == 1) {
break;
}
}
roots[0] = float(j);
if (j == 0) {
}
return true;
}
bool supertoroid::hit(const ray& r, float t_min, float t_max, hit_record& rec) const {
#if SUPERELLIPSOID_LOG == 1
std::cout << "-------------supertoroid::hit----------------" << endl;
#endif // SUPERELLIPSOID_LOG
float intercept_tori_x, intercept_tori_y, intercept_tori_z;
float pow_y = pow(1+pow(radius, (2/p_e1)), (p_e1/2));
intercept_tori_x = (radius+1)*intercept_x;
intercept_tori_y = pow_y*intercept_y;
intercept_tori_z = (radius+1)*intercept_z;
/*这三个值,是分别令y, z为0,求得intercept_tori_x;令x, z为0,求得intercept_tori_y;令x, y为0,求得intercept_tori_z*/
vec3 vertex_l[4], vertex_h[4];
vertex_l[0] = vec3(center.x()-intercept_tori_x, center.y()-intercept_tori_y, center.z()-intercept_tori_z);
vertex_h[0] = vec3(center.x()+intercept_tori_x, center.y()+intercept_tori_y, center.z()+intercept_tori_z);
vertex_l[1] = vec3(center.x()-intercept_tori_x/2, center.y()-intercept_tori_y, center.z()-intercept_tori_z);
vertex_h[1] = vec3(center.x()+intercept_tori_x/2, center.y()+intercept_tori_y, center.z()+intercept_tori_z);
vertex_l[2] = vec3(center.x()-intercept_tori_x, center.y()-intercept_tori_y/2, center.z()-intercept_tori_z);
vertex_h[2] = vec3(center.x()+intercept_tori_x, center.y()+intercept_tori_y/2, center.z()+intercept_tori_z);
vertex_l[3] = vec3(center.x()-intercept_tori_x, center.y()-intercept_tori_y, center.z()-intercept_tori_z/2);
vertex_h[3] = vec3(center.x()+intercept_tori_x, center.y()+intercept_tori_y, center.z()+intercept_tori_z/2);
float roots[2] = {0.0, -1.0};
float x0[initial_number+1];
float t_near = 0;
float t_far = 0;
if (ray_hit_box_t(r, vertex_l[0], vertex_h[0], t_near, t_far)) {
for (int i=0; i<initial_number; i++) {
x0[i+1] = t_near + i*(t_far - t_near)/(initial_number-1);
}
/*将t_near, t_far等分若干份,得到若干个迭代初值*/
x0[0] = float(initial_number);
get_roots_by_newton_iteration_t(r, center, intercept_x, intercept_y, intercept_z, radius, p_e1, p_e2, initial_number, tolerance, x0, roots);
}
else {
return false;
}
float temp;
if (roots[0] > 0.0001) {
for (int i=1; i<int(roots[0]); i++) {
for (int j=i+1; j<int(roots[0])+1; j++) {
if (roots[i] > roots[j]) {
temp = roots[i];
roots[i] = roots[j];
roots[j] = temp;
}
}
}
double nx, ny, nz, pow_x, pow_z, pow_x_d, pow_z_d, pow_y_d, pow_x_z, pow_x_z_d, pow_x_z_a4_d;
float d_a1 = intercept_x;
float d_a2 = intercept_y;
float d_a3 = intercept_z;
float d_a4 = radius;
vec3 pc;
for (int k=1; k<int(roots[0])+1; k++) {
if (roots[k] < t_max && roots[k] > t_min) {
rec.t = roots[k];
rec.p = r.point_at_parameter(rec.t);
pc = rec.p - center;
if (pc.x() < 0) {d_a1 = -intercept_x;}
if (pc.y() < 0) {d_a2 = -intercept_y;}
if (pc.z() < 0) {d_a3 = -intercept_z;}
if (pc.x() == 0) {
pow_x = 0;
pow_x_d = 0;
}
else {
pow_x = pow(double(fabs(pc.x()/d_a1)), double(2/p_e2));
pow_x_d = pow(double(fabs(pc.x()/d_a1)), double(2/p_e2-1));
}
if (pc.y() == 0) {
pow_y_d = 0;
}
else {
pow_y_d = pow(double(fabs(pc.y()/d_a2)), double(2/p_e1-1));
}
if (pc.z() == 0) {
pow_z = 0;
pow_z_d = 0;
}
else {
pow_z = pow(double(fabs(pc.z()/d_a3)), double(2/p_e2));
pow_z_d = pow(double(fabs(pc.z()/d_a3)), double(2/p_e2-1));
}
if ((pow_x+pow_z) == 0) {
pow_x_z = 0;
pow_x_z_d = 0;
}
else {
pow_x_z = pow(pow_x+pow_z, (p_e2/2));
pow_x_z_d = pow(pow_x+pow_z, (p_e2/2)-1);
}
if ((pow_x_z-d_a4) == 0) {
pow_x_z_a4_d = 0;
}
else {
pow_x_z_a4_d = pow(fabs(pow_x_z-d_a4), (2/p_e1)-1);
}
nx = double(2/p_e1) * pow_x_z_a4_d * pow_x_z_d * pow_x_d / d_a1;
ny = double(2/p_e1) * pow_y_d / d_a2;
nz = double(2/p_e1) * pow_x_z_a4_d * pow_x_z_d * pow_z_d / d_a3;
if (isnan(nx)) {
nx = nx * 1;
}
nx = nx/sqrt(nx*nx+ny*ny+nz*nz);
ny = ny/sqrt(nx*nx+ny*ny+nz*nz);
nz = nz/sqrt(nx*nx+ny*ny+nz*nz);
rec.normal = unit_vector(vec3(float(nx), float(ny), float(nz)));
if(dot(r.direction(), rec.normal) > 0) {
rec.normal = - rec.normal;
}
rec.mat_ptr = ma;
rec.u = -1.0;
rec.v = -1.0;
return true;
}
}
return false;
}
else {
return false;
}
return false;
}
----------------------------------------------main.cpp ------------------------------------------
main.cpp
hitable *list[1];
list[0] = new supertoroid(vec3(0, 3, 0), 1, 1, 1, 6, 2, 0.1, 16, 0.0001, new lambertian(vec3(0.0, 1.0, 0.0)));
hitable *world = new hitable_list(list,1);
vec3 lookfrom(10, 20, 20);
vec3 lookat(0, 3, 0);
float dist_to_focus = (lookfrom - lookat).length();
float aperture = 0.0;
camera cam(lookfrom, lookat, vec3(0,1,0), 30, float(nx)/float(ny), aperture, 0.7*dist_to_focus);
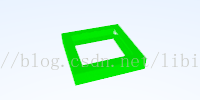
输出结果如下:
e1=0.1, e2=1, initial_number=10, tol=0.0001

e1=0.1, e2=1, initial_number=16, tol=0.0001

将迭代初值个数调到16,还是有未能迭代到的实根,只有再增加迭代初值的个数。此处不再调试,太费时间了(调一张图要花差不多半个小时,太慢了)。
e1=1, e2=1, initial_number=10, tol=0.0001

e1=2, e2=1, initial_number=16, tol=0.0001

e1=4, e2=1, initial_number=16, tol=0.0001

e1=0.1, e2=0.1, initial_number=16, tol=0.0001

将采样次数设为1,调了比较接近的图:
e1=0.1, e2=1, initial_number=56, tol=0.002

e1=0.1, e2=1, initial_number=56, tol=0.004

e1=1, e2=0.1, initial_number=16, tol=0.0001

e1=2, e2=0.1, initial_number=16, tol=0.0001

e1=0.1, e2=2, initial_number=16, tol=0.0001
e1=1, e2=2, initial_number=16, tol=0.0001

e1=0.1, e2=3, initial_number=16, tol=0.0001

e1=1, e2=3, initial_number=16, tol=0.0001

最后贴一张截图,主要是看看生成图片是多花时间。














 579
579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









