







ref: https://blog.csdn.net/k346k346/article/details/52244123
一、问题描述
1.Voronoi图的定义
又叫泰森多边形或Dirichlet图,它是由一组由连接两邻点直线的垂直平分线组成的连续多边形组成。
2.Voronoi图的特点
(1)每个V多边形内有一个生成元;
(2)每个V多边形内点到该生成元距离短于到其它生成元距离;
(3)多边形边界上的点到生成此边界的生成元距离相等;
(4)邻接图形的Voronoi多边形界线以原邻接界线作为子集。
3.Voronoi的应用
在计算几何学科中的重要地位,由于其根据点集划分的区域到点的距离最近的特点,其在地理学、气象学、结晶学、航天、核物理学、机器人等领域具有广泛的应用。如在障碍物点集中,规避障碍寻找最佳路径。
二、算法分析与设计
Voronoi图有着按距离划分邻近区域的普遍特性,应用范围广。生成V图的方法很多,常见的有分治法、扫描线算法和Delaunay三角剖分算法。
1.建立Voronoi图方法和步骤
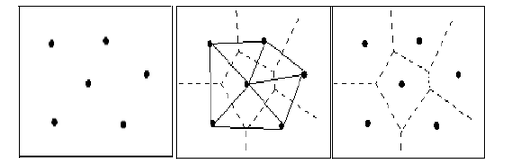
本次实验采用的是Delaunay三角剖分算法。主要是指生成Voronoi图时先生成其对偶元Delaunay三角网,再找出三角网每一三角形的外接圆圆心,最后连接相邻三角形的外接圆圆心,形成以每一三角形顶点为生成元的多边形网。如下图所示。
建立Voronoi图算法的关键是对离散数据点合理地连成三角网,即构建Delaunay三角网。
建立Voronoi图的步骤为:
(1)离散点自动构建三角网,即构建Delaunay三角网。对离散点和形成的三角形编号,记录每个三角形是由哪三个离散点构成的。
(2)计算每个三角形的外接圆圆心,并记录之。
(3)遍历三角形链表,寻找与当前三角形pTri三边共边的相邻三角形TriA,TriB和TriC。
(4)如果找到,则把寻找到的三角形的外心与pTri的外心连接,存入维诺边链表中。如果找不到,则求出最外边的中垂线射线存入维诺边链表中。
(5)遍历结束,所有维诺边被找到,根据边画出维诺图。
2. Delaunay三角网的生成
建立Voronoi图的关键是Delaunay三角网的生成。Delaunay三角网的特性:
(1)空圆性,任一三角形外接圆内部不包含其他点。
(2)最接近:以最近临的三点形成三角形,且各线段(三角形的边)皆不相交。
(3)唯一性:不论从区域何处开始构建,最终都将得到一致的结果。
(4)最优性:任意两个相邻三角形形成的凸四边形的对角线如果可以互换的话,那么两个三角形六个内角中最小的角度不会变大。
(5)最规则:如果将三角网中的每个三角形的最小角进行升序排列,则Delaunay三角网的排列得到的数值最大。
(6)区域性:新增、删除、移动某一个顶点时只会影响临近的三角形。
(7)具有凸多边形的外壳:三角网最外层的边界形成一个凸多边形的外壳。
Delaunay剖分是一种三角剖分的标准,实现它有多种算法。本次采用Bowyer-Watson算法,算法的基本步骤是:
(1)构造一个超级三角形,包含所有散点,放入三角形链表。
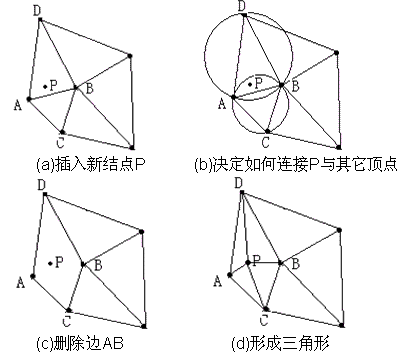
(2)将点集中的散点依次插入,在三角形链表中找出其外接圆包含
插入点的三角形(称为该点的影响三角形),删除影响三角形的公共边,将插入点同影响三角形的全部顶点连接起来,从而完成一个点在Delaunay三角形链表中的插入。
(3)根据优化准则对局部新形成的三角形进行优化。将形成的三角形放入Delaunay三角形链表。
(4)循环执行上述第2步,直到所有散点插入完毕。
关键步骤2如下图所示:
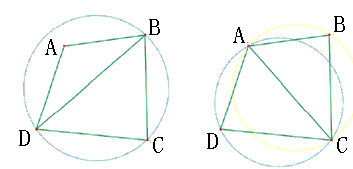
步骤3的局部优化的准则指的是:
1.对新形成的三角形进行优化,将两个具有共同边的三角形合成一个多边形。
2.以最大空圆准则作检查,看其第四个顶点是否在三角形的外接圆之内。
3.如果在,修正对角线即将对角线对调,即完成局部优化过程的处理。
LOP (Local Optimization Procedure)处理过程如下图所示:
3.数据结构的设计
本程序的实现采用C#面向对象语言实现,故数据结构的设计采用类的形式,具体有:
// 点:
public class Site
{
public double x, y;
public Site()
{ }
public Site(double x, double y)
{
this.x = x;
this.y = y;
}
}
// 边:
public class Edge
{
public Site a, b;
public Edge(Site a, Site b)
{
this.a = a;
this.b = b;
}
}
// 三角形:
public class DelaunayTriangle
{
Voronoi voronoi = new Voronoi();
public Site site1, site2, site3;//三角形三点
public Site centerPoint;//外界圆圆心
public double radius;//外接圆半径
public List<DelaunayTriangle> adjoinTriangle;//邻接三角形
public DelaunayTriangle(Site site1,Site site2,Site site3)
{
centerPoint = new Site();
this.site1 = site1;
this.site2 = site2;
this.site3 = site3;
//构造外接圆圆心以及半径
voronoi.circle_center(centerPoint, site1, site2,site3,ref radius);
}
}4. 算法复杂度分析
时间复杂度:
Delaunay三角网的生成的时间复杂度:
步骤一:构造一个超级三角形,O(1);
步骤二:产找影响的三角形,构造新的三角形,O(1+2+…+n)=O(n2)O(1+2+…+n)=O(n2)
步骤三:对新形成的三角形进行优化局部优化:O(n)。
因此,整体时间复杂度是:O(1)+O(n2)+O(n)=O(n2)O(1)+O(n2)+O(n)=O(n2)。
从Delaunay三角网生成Voronoi图的时间复杂度:
步骤一:构造构建Delaunay三角网,O(n2)O(n2);
步骤二:计算三角形外接圆圆心,O(n);
步骤三:寻找三角形三边相邻三角形:3O(n);
步骤四:找到的维诺边存入链表中,画出维诺图:O(n)。
因此,整体时间复杂度是O(n2)+O(n)+3O(n)+O(n)=O(n2)O(n2)+O(n)+3O(n)+O(n)=O(n2)。
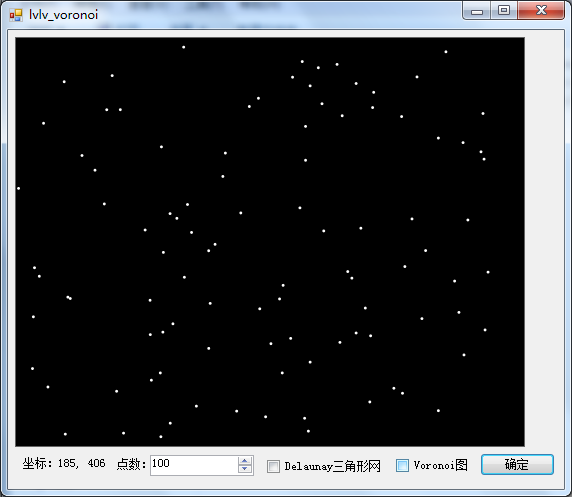
三、实验结果
随机生成点:
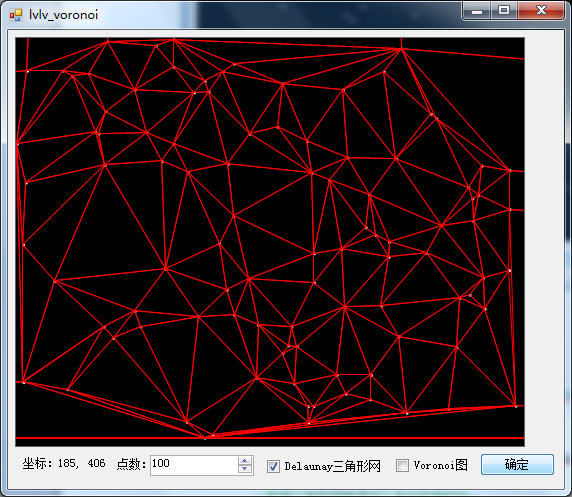
生成Delaunay三角形网:
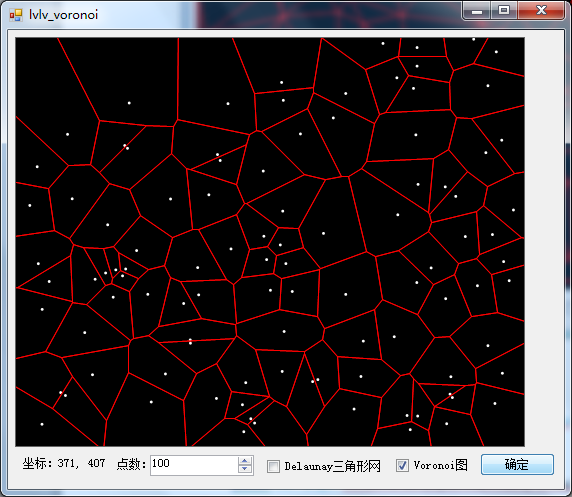
生成Voronoi图:
生成Voronoi图的可执行程序和源码工程文件见here。
下面附上相关函数申明(详细代码见源码工程文件)。
//根据点集构造Delaunay三角形网
public void setDelaunayTriangle(List<DelaunayTriangle> allTriangle, List<Site> sites);
//根据Delaunay三角形网构造Voronoi图的边
public List<Edge> returnVoronoiEdgesFromDelaunayTriangles(List<DelaunayTriangle> allTriangle, List<Edge> voronoiRayEdgeList);
//根据三角形链表返回三角形所有的边
public List<Edge> returnEdgesofTriangleList(List<DelaunayTriangle> allTriangle);
//对新形成的三角形进行局部优化
public List<DelaunayTriangle> LOP(List<DelaunayTriangle> newTriList);
//判断边是否属于三角形
public bool isEdgeOnTriangle(DelaunayTriangle triangel,Edge edge);
//判断点是否属于三角形
public bool isPointOnTriangle(DelaunayTriangle triangle, Site site);
//将点与受影响的三角形三点连接,形成新的三个三角形添加到三角形链中
public void addNewDelaunayTriangle(List<DelaunayTriangle> allTriangles,DelaunayTriangle influenedTri,Site point);
//找出受影响的三角形的公共边
public List<Edge> findCommonEdges(List<DelaunayTriangle> influenedTriangles);
//找出两个三角形的公共边
public Edge findCommonEdge(DelaunayTriangle chgTri1, DelaunayTriangle chgTri2);
//判断插入点是否在三角形边上
public Site[] isOnEdges(DelaunayTriangle triangle,Site site);
//判断点是否在三角形外接圆的内部
public bool isInCircle(DelaunayTriangle triangle, Site site) ;
//求三角形的外接圆心
public void circle_center(Site center, Site sites0, Site sites1, Site sites2, ref double radius) ;
//求两点之间距离
public double distance2Point(Site p,Site p2);













 4780
4780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









