







转载自:http://blog.csdn.net/shenxiaolu1984/article/details/50372909
Mnih, Andriy, and Ruslan Salakhutdinov. “Probabilistic matrix factorization.” Advances in neural information processing systems. 2007.
本篇论文发表于2007年NIPS。Ruslan Salakhutdinov来自多伦多大学,16年转入CMU。Andriy Mnih同样来自多伦多大学,师从Hinton。PMF算法(Probabilistic Matrix Factorization)是现代推荐系统的基础算法之一。
问题描述
设有
N
个用户,
M
部电影。一个评分系统可以用
N×M
矩阵
R
来表示。
推荐系统问题如下:
R
矩阵中只有部分元素是已知的(用户只给一部分电影打过分),且
R
往往非常稀疏,需要求出
R
缺失的部分。
除了推荐系统,这个模型也可以用来描述任意“成对”作用的系统。例如:由若干球队组成的联赛,两支球队间的历史比分即为
R
的已知元素,需要预测尚未进行的比赛结果。这里
R
是一个方阵。
基本思路
本文采取low-dimensional factor模型,也称为low rank模型来处理这个问题。其核心思想是:用户和电影之间的关系(即用户对电影的偏好)可以由较少的几个因素的线性组合决定。
例子
用户是否喜欢一部电影取决于三个因素:是娱乐片还是文艺片,是外文片还是华语片,演员是否出名。
用三维向量 x=[0.6,1.0,−0.2]T 来描述一个用户(假设取值在[-1,1]之间):他比较喜欢娱乐片,只看外文片,对演员要求一般,小众一点更好。
对于一部电影,用另一个三维向量来描述 y=[0.9,−1.0,0.8]T :这是一部众星云集的-国产-娱乐大作。
可以算出这个用户对于这部电影的喜好程度 r=xTy=−2.06 :相当不喜欢。
用矩阵语言来描述,就是评分矩阵可以分解为两个低维矩阵的乘积
R=UTV
,其中
D×N
矩阵
U
描述
N
个用户的属性,
D×M
矩阵
V
描述
M
部电影的属性。
根据矩阵秩的性质,
R
的秩不超过
U,V
的最小尺寸
D
。
实际上,由于系统噪音存在,不可能做出这样的完美分解,另外
R
包含很多未知元素。所以问题转化为:
- 对一个近似矩阵进行分解
R^=UTV
- 要求近似矩阵
R^
在观测到的评分部分和观测矩阵
R
尽量相似
- 为了防止过拟合,需要对
U,V
做某种形式的约束
用贝叶斯观点来说, R 是观测到的值, U,V 描述了系统的内部特征,是需要估计的。
基础PMF模型
使用如下两个假设
- 观测噪声(观测评分矩阵
R
和近似评分矩阵
R^
之差)为高斯分布
- 用户属性
U
和电影属性
V
均为高斯分布
利用第一个假设,可以写出完整观测矩阵的概率密度函数。其中
σ
是观测噪声的方差,人工设定。
利用第二个假设,可以写出用户、电影属性的概率密度函数。其中
σU,σV
是先验噪声的方差,人工设定。
综合以上两个概率密度函数,利用经典的后验概率推导,可以得到
基础PMF求解
最大化上述概率,则可以通过已有的观测矩阵 R 估计出系统参数 U,V 。
为了计算方便,对后验概率取对数
高斯分布公式及其对数形式:
p(x)=12π−−√σexp(−(x−μ)22σ2)
lnp(x)=−ln(2π−−√σ)−(x−μ)22σ2
由于后验概率中的方差都是预设常数,故只有第二项和待优化的
U,V
有关。
最大化上述对数后验概率,等价于最小化如下能量函数:
做参数替换约掉一个变量:
如果系统先验方差 σU,σV 无穷大(即无法对系统参数做约束),则上式只剩第一项,退化为一个SVD分解问题。
刚才的几步推导中,为了书写简便实际上做了一些省略:矩阵的概率密度应该等于其元素概率密度的乘积。取对数之后,即等于其元素概率密度的和。
最后,为了限制评分的范围,对高斯函数的均值施加logistic函数
g(x)=1/(1+exp(−x))
,其取值在(-1,1)之间。最终的能量函数是:
至此,可以使用梯度下降方法,通过 ∂E/∂Uik,∂E/∂Vjk 求解 Ui,Vj 中的每一个元素。
需要估计的参数数量为 M×D+N×D 。对于每一个参数,由于能量函数第一项只在有观测时需要计算,所以所需时间相对于观测数量为线性(?)。
性能
1998年至2005年Netflix数据,设定D=30,使用Matlab,在30分钟内完成训练。
控制模型复杂度
最简单的控制复杂度的方法是调整特征维度:
D
约大,模型越精确,但也越容易过拟合。
D
应该和用户的打分数量相关:如果用户看过的电影多,则可以用较多特征来描述,可以使用较大的D。
但实际数据往往是不均衡的:电影爱好者给出的打分很多,而很多用户只会给一两部电影打分。
较好的方法是选择一个中等尺度的
D
,之后调整
λU=σ/σU,λV=σ/σV
。
σ
大说明观测噪声大,则第一个误差项不靠谱,
λU
较大,应较多依赖后两个正则项:要求系统参数
U,V
的绝对值较小;反之,
σU
大,说明系统参数本身方差大,
λU
较小,允许
U,V
的绝对值较大
带有自适应先验的PMF
先验的超参数(hyperparameter):
ΘU,ΘV
可以从训练样本中估计。这两个
Θ
和前述
λ
类似。
类似地,可以给 ΘU,ΘV 设定先验,轮流对参数和超参数使用梯度下降或者EM算法更新。
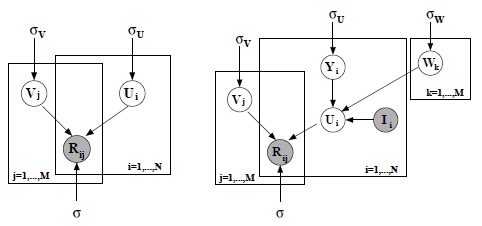
限制性PMF
“用户是否给某部电影打过分”这个信息本身就能一定程度上说明用户的属性。Constrained PMF尝试把 Iij 引入到模型中去。这也是本文的创新之处。
用 M×D 矩阵 W 表述电影对用户的影响。其中第k行 Wk 表示,如果用户看过第k部电影,则用户应该具有属性 Wk 。
用户属性U由两部分组成:和之前相同的高斯部分
Y
,以及
W
用“看过”矩阵
I
加权的结果。
其中
W
服从方差为
σW
的0均值高斯分布。
在已知
R
的情况下,同样用梯度下降方法可以求解
U,V,W
。
下图用概率图模型表示基础PMF(左)和限定性PMF(右):
实验
涉及的数据集如下
| 数据集 | 打分 | 用户 | 电影 |
|---|---|---|---|
| Netflix Train | 100,480K | 480K | 17K |
| Netflix Valid | 1,408K | - | - |
| Netflix Test | 2,817K | - | - |
为了提高训练速度,采用了mini-batche方法:每100K个观测(用户给某部电影打分),更新一次待求参数。learning rate = 0.005, momentum = 0.9。
梯度下降的learning rate和momentum参见这个链接
简而言之,学习率决定每一步大小,动量避免曲折过于严重。
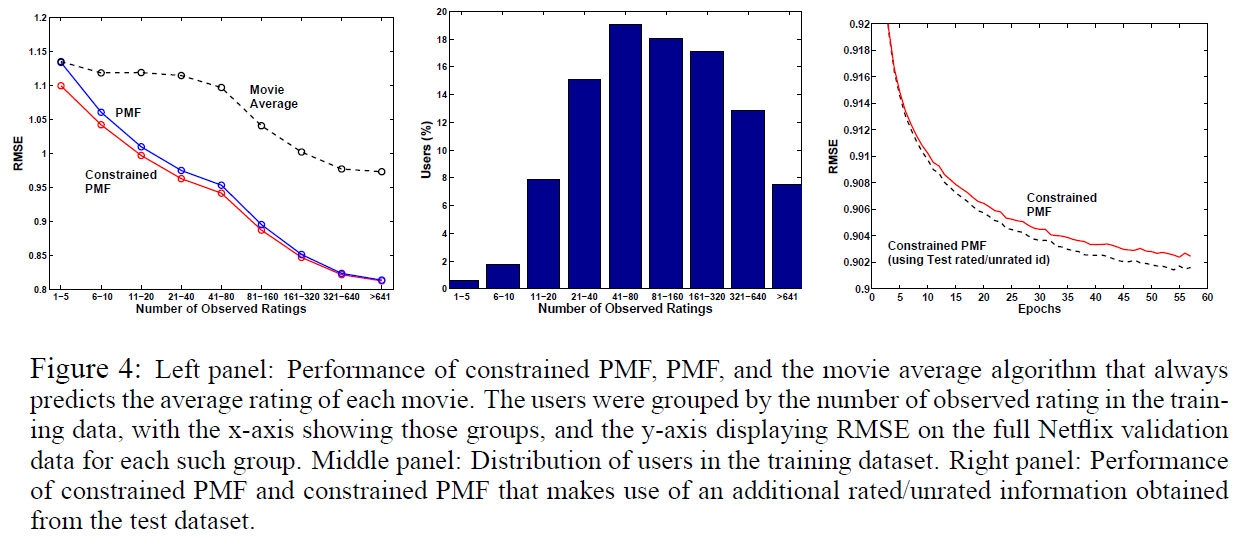
可以看出限定性PMF比基础PMF的优越性
扩展
第6章总结中提到: Efficiency in training PMF models comes from finding only point estimates of model parameters and hyperparameters, instead of inferring the full posterior distribution over them.
这里的point estimation指的是只估计了
U,V,λU,λV
的一个值,而没有估计它们的概率分布,所以大大提高了速度。但是其缺点是容易过拟合。
与之相对的,还可以使用贝叶斯估计,把系统参数当成一个随机变量。具体可以参看这篇博客:贝叶斯PMF,介绍同作者的这篇论文:
Salakhutdinov, Ruslan, and A. Mnih. “Bayesian probabilistic matrix factorization using markov chain monte carlo.” International Conference on Machine Learning 2008:880-887.
另外,如果需要考虑一些明确的从属信息,例如评分的用户身份、评分发生的时间等,可以参看这篇博客:DPMF,介绍这篇论文:
Adams, Ryan Prescott, George E. Dahl, and Iain Murray. “Incorporating side information in probabilistic matrix factorization with gaussian processes.” arXiv preprint arXiv:1003.4944 (2010).














 390
390











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









