







该论文的目的是增强RGBD中的深度信息。利用的是shading-based方法,大体过程是通过光照模型渲染出深度图的亮度图,然后与真实RGB图片的亮度进行各种比较(梯度啊,亮度差啊之类的)。因为光照渲染是与3d点的法向量有关,而法向量又与RGBD图片中的深度信息有关,上面说的各种比较就能够将误差传播到3D点的法向量,最后传播到深度信息。这样就完成了深度信息的增强。
论文的效果很吊,可惜没有开源。这里只能记录一下理论相关的东西。
那么,既然是shading-based我们就需要先进行光照估计。
光照估计
论文使用的是2阶球面谐波光照模型:

其中,i、j是像素坐标, k(i,j) k ( i , j ) 是反射率。 lk l k 是2阶球面谐波的第k个系数(总共9个), Hk(n),n=(nx,ny,nz) H k ( n ) , n = ( n x , n y , n z ) 是2阶球面谐波方程,n是3D点的法向量。
2阶球面谐波的9个方程计算公式如下:
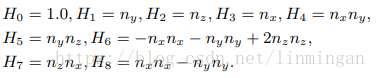
由于是对RGBD图片进行增强,因此我们已经预先知道了每个3D点的xyz坐标,也就知道了其对应的法向量。同时,先忽略反射率系数,那么现在需要求的就只有光照系数 lk<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









