







 这篇博客介绍了如何求解空间中线段上到已知直线的最近距离问题,提供了相应的数学分析和Ogre::Vector3的C++实现。通过计算参数t来确定最近点在线段上的位置,并处理了平行线段的情况。
这篇博客介绍了如何求解空间中线段上到已知直线的最近距离问题,提供了相应的数学分析和Ogre::Vector3的C++实现。通过计算参数t来确定最近点在线段上的位置,并处理了平行线段的情况。
这个其实是求线段到直线之间的最近距离,求出最近距离位置在线段上的点。
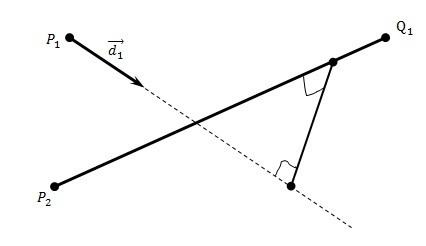
如下图所示,一条线段和一条直线的解的限定区域为[0, 1] ×[-∞, ∞]。假设直线为直线L_1 (s)=P_1+s(d_1 ) ⃗,则线段对应直线方程L_2(s)=P_2+t(d_2 ) ⃗中t的范围为[0, 1]。如果在线段所在的无限直线上的最接近点的参数小于0或者大于1,那么就必须在线段的一端取得最近的点,即为线段一端的端点。
根据上面的分析,线段上到直线距离最近的点为:(源码)
Ogre::Vector3 getClosestPointOnSegment(const Ogre::Vector3& lineBase,const Ogre::Vector3& lineDirection, const Ogre::Vector3& segmentBase,const Ogre::Vector3& segmentEnd)
{
Ogre::Vector3 segmentDirection = segmentEnd - segmentBase;
Ogre::Vector3 u = lineBase - segmentBase
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 305
305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









