







为什么图像是波以及滤波
0 前言
在图像处理中滤波是一种很常用的操作,无论是去噪、模糊,还是锐化和提取边缘都是在进行滤波,只不过是使用的滤波器不同。为什么图像可以进行滤波呢,通常我们都是针对波来进行滤波的?其实图像也是一种波,只不过是二维的(灰度图像,彩色图像可以看成是三维的),所以我们使用的滤波器也是二维的。我们常见的波,如声波是一维的,所使用的的滤波器一般也是一维的。
1 图像为什么是波呢
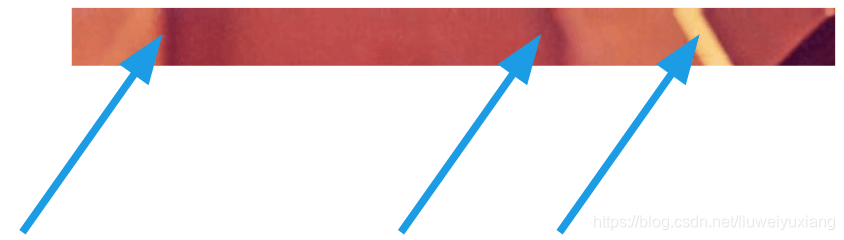
我们知道,图像由像素组成。下图是一张 400 x 400 的图片,一共包含了 16 万个像素点。

每个像素的颜色,可以用红、绿、蓝、透明度四个值描述,大小范围都是0 ~ 255,比如黑色是[0, 0, 0, 255],白色是[255, 255, 255, 255]。通过 Canvas API 就可以拿到这些值。
如果把每一行所有像素(上例是400个)的红、绿、蓝的值,依次画成三条曲线,就得到了下面的图形。
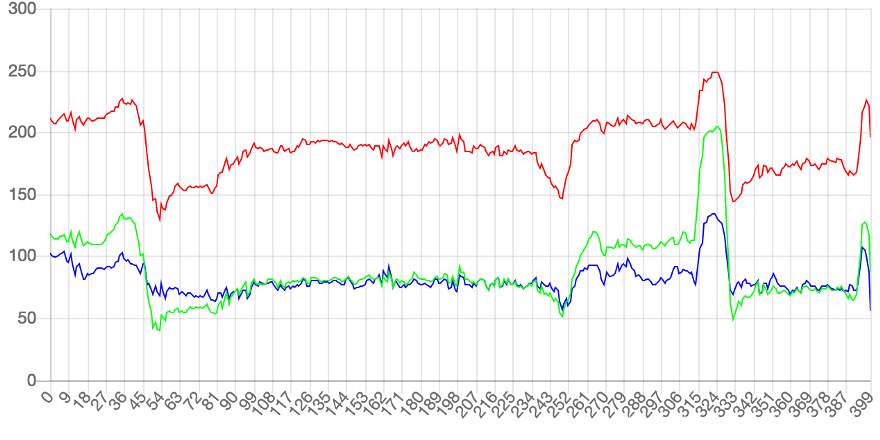
可以看到,每条曲线都在不停的上下波动。有些区域的波动比较小,有些区域突然出现了大幅波动(比如 54 和 324 这两点)。
对比一下图像就能发现,曲线波动较大的地方,也是图像出现突变的地方。
这只是一维的情况,其实我们可以想象一下,如果根据像素的值画出二维的波形图,应该是三个三个曲面,RGB三个通道分别是一个曲面。
2 频率
我们知道波是有频率、波长、周期等物理量的,一般的图像不是有规律的特定波形,所以波长和周期暂时不进行研究。我们来看图像的频率。
图像就是色彩的波动:波动大,就是色彩急剧变化;波动小,就是色彩平滑过渡。因此,波的各种指标可以用来描述图像。
频率(frequency)是波动快慢的指标,单位时间内波动次数越多,频率越高,反之越低。
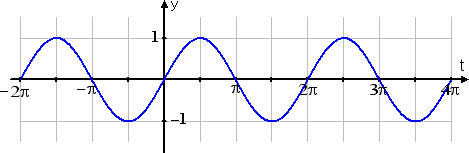
上图是函数sin(Θ)的图形,在2π的周期内完成了一次波动,频率就是1。
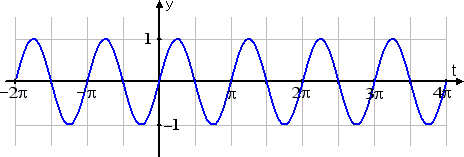
上图是函数sin(2Θ)的图形,在2π的周期内完成了两次波动,频率就是2。
所以,色彩剧烈变化的地方,就是图像的高频区域;色彩稳定平滑的地方,就是低频区域。
3 滤波
物理学对波的研究已经非常深入,提出了很多处理波的方法,其中就有滤波器(filter):过滤掉某些波,保留另一些波。
下面是两种常见的滤波器 。
- 低通滤波器(lowpass):减弱或阻隔高频信号,保留低频信号
- 高通滤波器(highpass):减弱或阻隔低频信号,保留高频信号
下面是低通滤波的例子。

上图中,蓝线是原始的波形,绿线是低通滤波lowpass后的波形。可以看到,绿线的波动比蓝线小很多,非常平滑。
下面是高通滤波的例子。
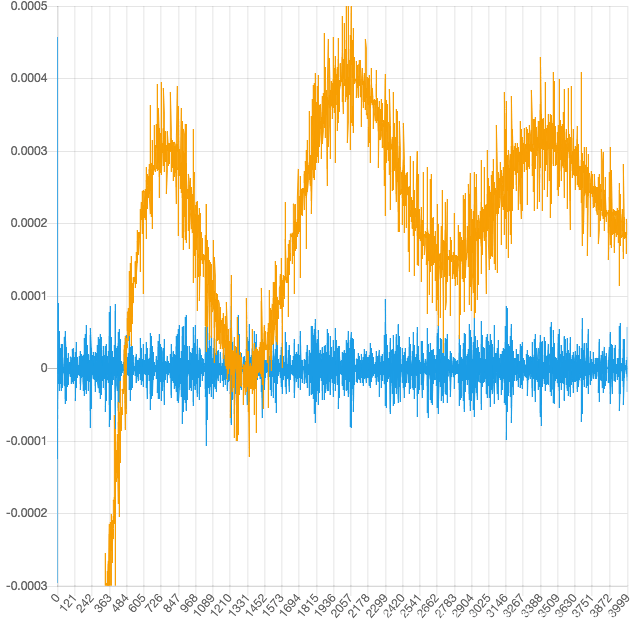
上图中,黄线是原始的波形,蓝线是高通滤波highpass后的波形。可以看到,黄线的三个波峰和两个波谷(低频波动),在蓝线上都消失了,而黄线上那些密集的小幅波动(高频波动),则是全部被蓝线保留。
再看一个例子。
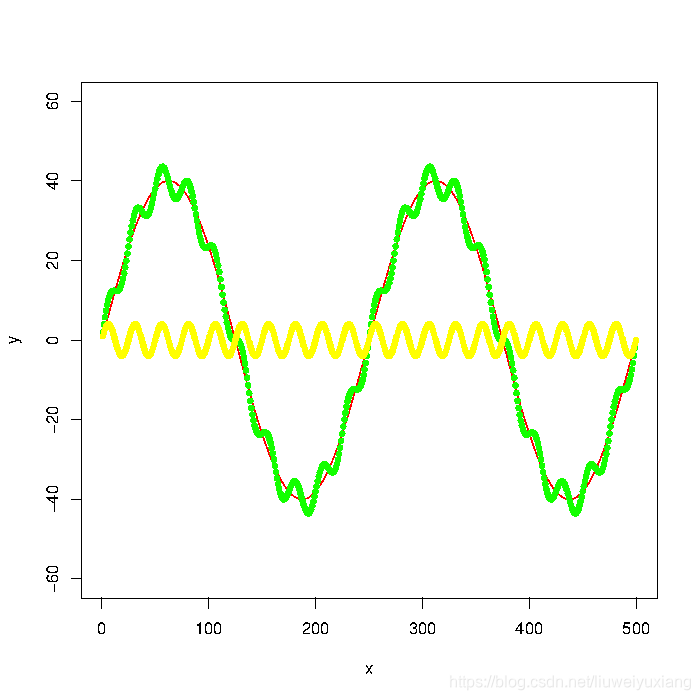
上图有三根曲线,黄线是高频波动,红线是低频波动。它们可以合成为一根曲线,就是绿线。
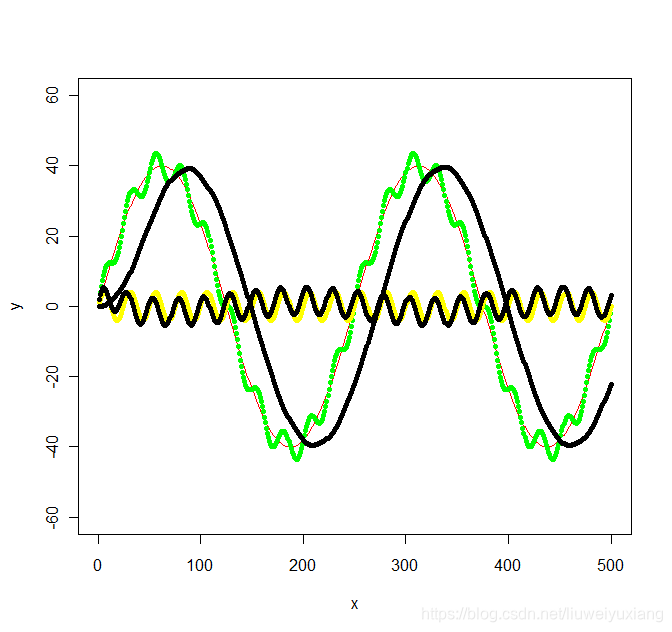
上图中,绿线进行低通滤波和高通滤波后,得到两根黑色的曲线,它们的波形跟原始的黄线和红线是完全一致的。
4 图像的滤波
图像的滤波与物理波的滤波是类似的,只不过是在二维(彩色图像也可以认为是三维)空间中进行的,要用的滤波器模板也是二维的。图像滤波是很多图像处理算法的预处理过程。
4.1 滤波的作用
消除图像中的噪声: 一般是使用低通滤波,噪声在图像中一般是高频信号。
为图像识别抽取出图像特征:这里的特征一般为边缘纹理的特征,一般是使用高通滤波,图像中边缘和纹理细节是高频信号。
4.2 滤波的分类
图像中滤波算法的分类有很多,除了上面介绍的低通和高通滤波器,还可以分为线性滤波和非线性滤波,可以分为相关滤波和卷积滤波,空间滤波和频域滤波。只不过是从不同的角度来进行解释,但是我个人认为,低通和高通滤波器这样的分类最能反映滤波器的本质。
4.2.1 线性滤波和非线性滤波
4.2.1.1 线性滤波
线性滤波: 维基百科解释为:用于时变输入信号的线性运算,在图像处理中可以这么理解,对于输入的信号(即要处理的图像),进行的是线性的运算,得出的结果作为输出图像。可以参考下图
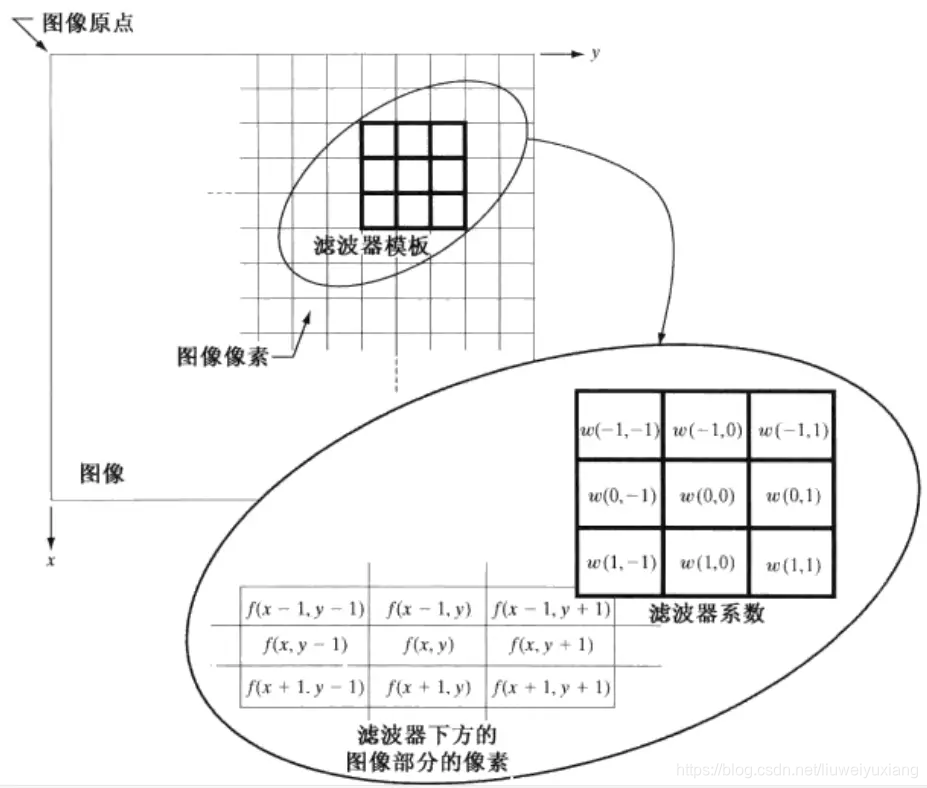
首先有一个滤波器的模板(这里是3x3大小),模板里有系数,输出图像上f(x,y)的值等于模板系数与输入图像f(x,y)周围的像素点相乘求和,这个运算是线性的。在线性的滤波器中,运算的不同即为滤波器的系数模板不同。
线性滤波的包含: 方框滤波、均值滤波、高斯滤波、拉普拉斯滤波、sobel算子等。
方框滤波:
方框滤波,线性滤波里面最简单的一个。即用一个已确定的模板系数去与像素点邻域相乘,所得结果累加即为像素点的响应。
均值滤波:
均值滤波则是方框滤波的特例,将方框滤波的系数模板归一化之后便是均值滤波
可以看到,均值滤波的结果是取像素点周围领域的平均值作为响应输出。
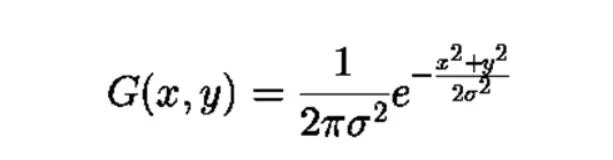
高斯滤波:
高斯滤波的模板系数就稍显复杂,其模板系数是服从高斯分布的。
先看看一维的高斯分布和二维的高斯分布:
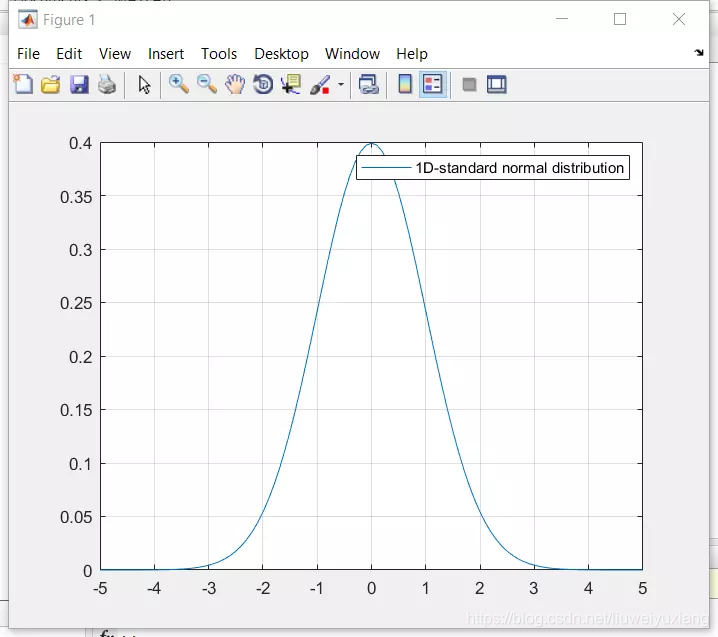
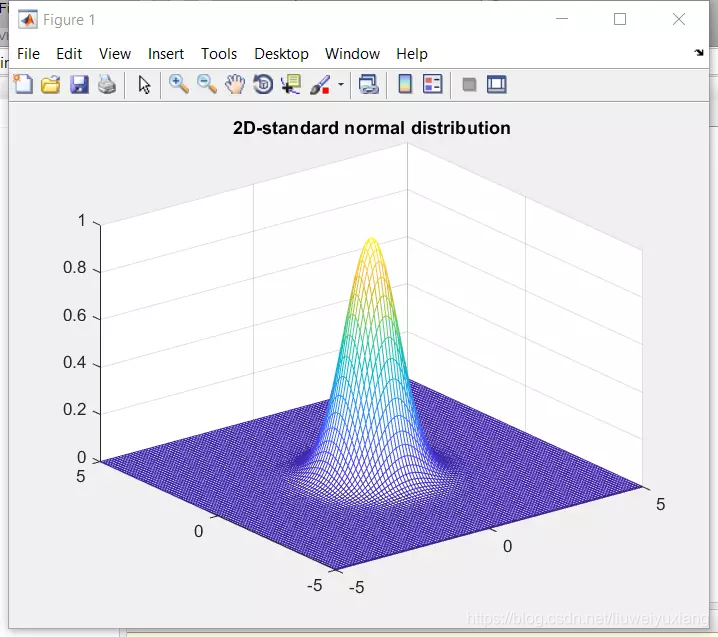
所以高斯滤波的模板系数,应该服从上图中的锥形山峰。那如何计算高斯分布的模板系数呢,我们取均值为模板的中心点,计算公式如下:
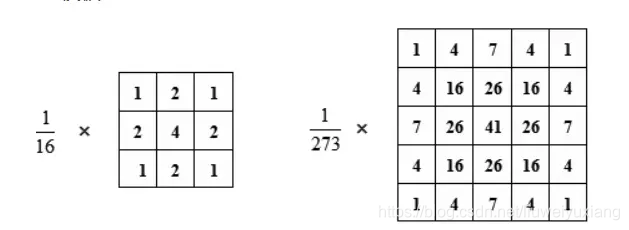
假如不想手动计算高斯滤波的模板系数,也可以取模板的近似值作为模板。如3x3和5x5的模板可以取
sobel算子
Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。sobel算子对边缘定位不是很准确,图像的边缘不止一个像素;当对精度要求不是很高时,是一种较为常用的边缘检测方法。
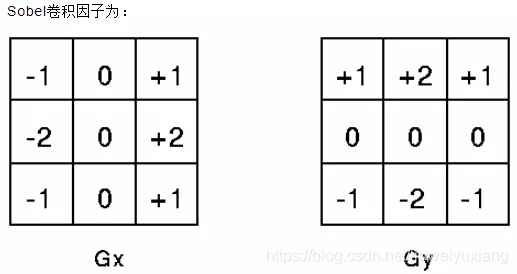

一阶导数可以由差分来近似,可以求得Gx和Gy:

Canny算子
该算子功能比前面几种都要好,但是它实现起来较为麻烦,Canny算子是一个具有滤波,增强,检测的多阶段的优化算子,在进行处理前,Canny算子先利用高斯平滑滤波器来平滑图像以除去噪声,Canny分割算法采用一阶偏导的有限差分来计算梯度幅值和方向,在处理过程中,Canny算子还将经过一个非极大值抑制的过程,最后Canny算子还采用两个阈值来连接边缘。
Canny边缘检测算法:
step1: 用高斯滤波器平滑图象;
step2: 用一阶偏导的有限差分来计算梯度的幅值和方向;
step3: 对梯度幅值进行非极大值抑制
step4: 用双阈值算法检测和连接边缘
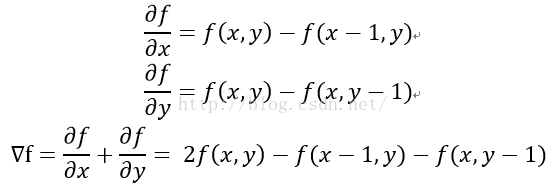
拉普拉斯算子:
Laplace算子是一种各向同性算子,二阶微分算子。一个函数的一阶微分描述了函数图像是朝哪里变化的,即增长或者降低;而二阶微分描述的则是图像变化的速度,急剧增长下降还是平缓的增长下降。当邻域中心像素灰度低于它所在的领域内其它像素的平均灰度时,此中心像素的灰度应被进一步降低,当邻域中心像素灰度高于它所在的邻域内其它像素的平均灰度时,此中心像素的灰度应被进一步提高,以此实现图像的锐化处理。
算子定义为
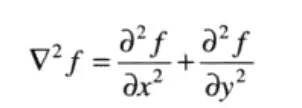
下面由算子推导计算模板系数
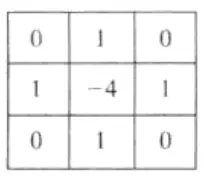
在x方向上,二阶导数的微分可以由差分近似表示,有

类似地,在y方向上有

所以拉普拉斯算子在离散的情况下,可以近似为
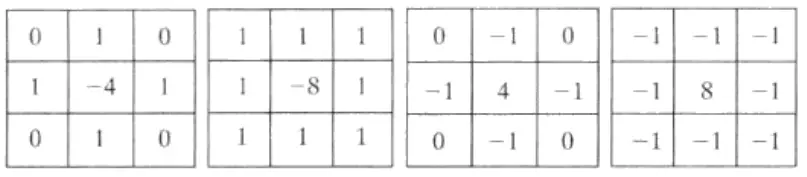
还有一般常用的其他拉普拉斯模板
4.2.1.2 非线性滤波
非线性滤波: 输出的信号响应是由输入经过非线性的运算得到的。比如典型的中值滤波,就是取像素点邻域的中值作为像素的的响应输出。
非线性滤波包含:中值滤波,最大最小值滤波,双边滤波。
双边滤波:
一种同时考虑了像素空间差异与强度差异的滤波器,因此具有保持图像边缘的特性。先看看高斯滤波器
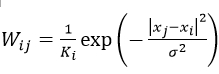
其中W是权重,i和j是像素索引,K是归一化常量。公式中可以看出,权重只和像素之间的空间距离有关系,无论图像的内容是什么,都有相同的滤波效果。
再来看看双边滤波器,它只是在原有高斯函数的基础上加了一项,如下
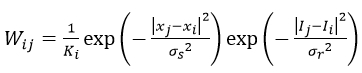
其中 I 是像素的强度值,所以在强度差距大的地方(边缘),权重会减小,滤波效应也就变小。总体而言,在像素强度变换不大的区域,双边滤波有类似于高斯滤波的效果,而在图像边缘等强度梯度较大的地方,可以保持梯度。
4.2.2 卷积滤波和相关滤波
首先要注意的是卷积滤波和相关滤波都属于线性滤波,两者的区别是加权系数的对应相乘顺序有所不同。相关是滤波器模板移过图像并计算计算每个位置乘积之和的处理,卷积的机理相似,但滤波器首先要旋转180度。
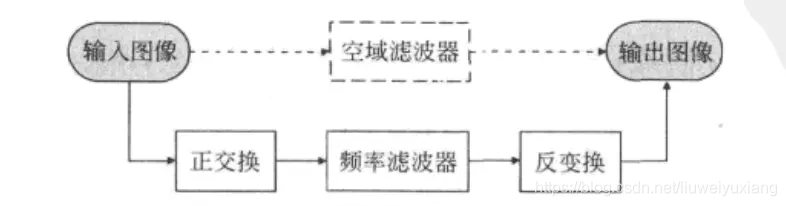
4.2.3 空间滤波和频域滤波
空间滤波即直接在像素坐标上对图像数据进行处理滤波,频域滤波则是先把图像由空间域变换到频域,在频域进行处理,结束以后再由频域变换会空间域。
有关频域滤波的只是参考:
- 数字图像处理-频域滤波-高通/低通滤波
- 数字图像处理-频域滤波-带通/带阻滤波
周期性噪声很适合在频域中滤波进行处理。周期性的噪声有一定的变化频率,我们只需要设计一个滤波器,在频域空间将这个频率的信息消除就可以完成频域滤波,而不影响其他频率的信息。相比空间域滤波具有很大的优势。
这篇博客图像的二维傅里叶变换频谱图特点研究挺有意思的,分析了简单模式的频谱情况。
参考文献:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









