







目录
SimpleFOC的教程比较多,做了一个总链接,欢迎点击阅读:SimpleFOC教程链接汇总
说明
本节比较简单,主要是演示I2C接口和SPI接口读取编码器角度。
为增加大家对编码器的理解,后面介绍常用编码器并提供原理图和源代码。
一、硬件介绍
本节实验适合运行在SimpleMotor和STM32最小系统板上(Bluepill)。

20230323更新,增加了MT6701编码器说明
1.1、硬件准备
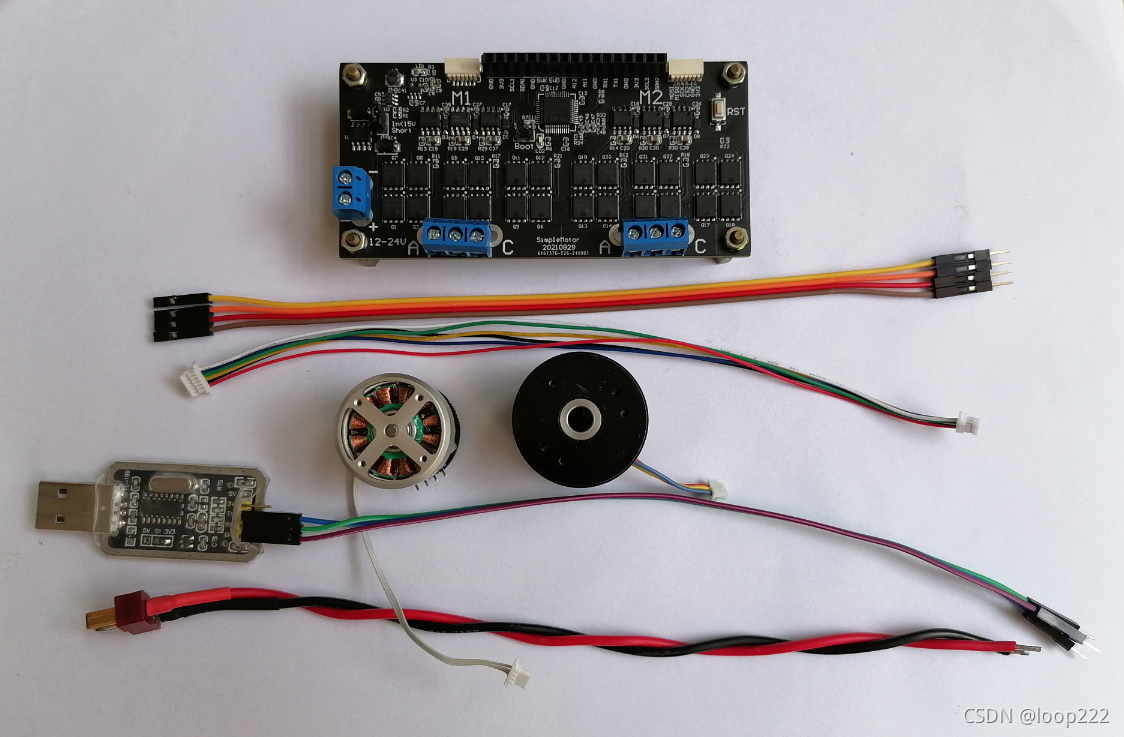
1.1.1、SimpleMotor方案
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | SimpleMotor | 1 |
| 2 | 带编码器云台电机 | 2 |
| 3 | USB转串口 | 1 |
| 4 | 12V电源 | 1 |
两个编码器可以是两个AS5600,也可以是两个TLE5012B,或者一个是AS5600,一个是TLE5012B。
驱动板103 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
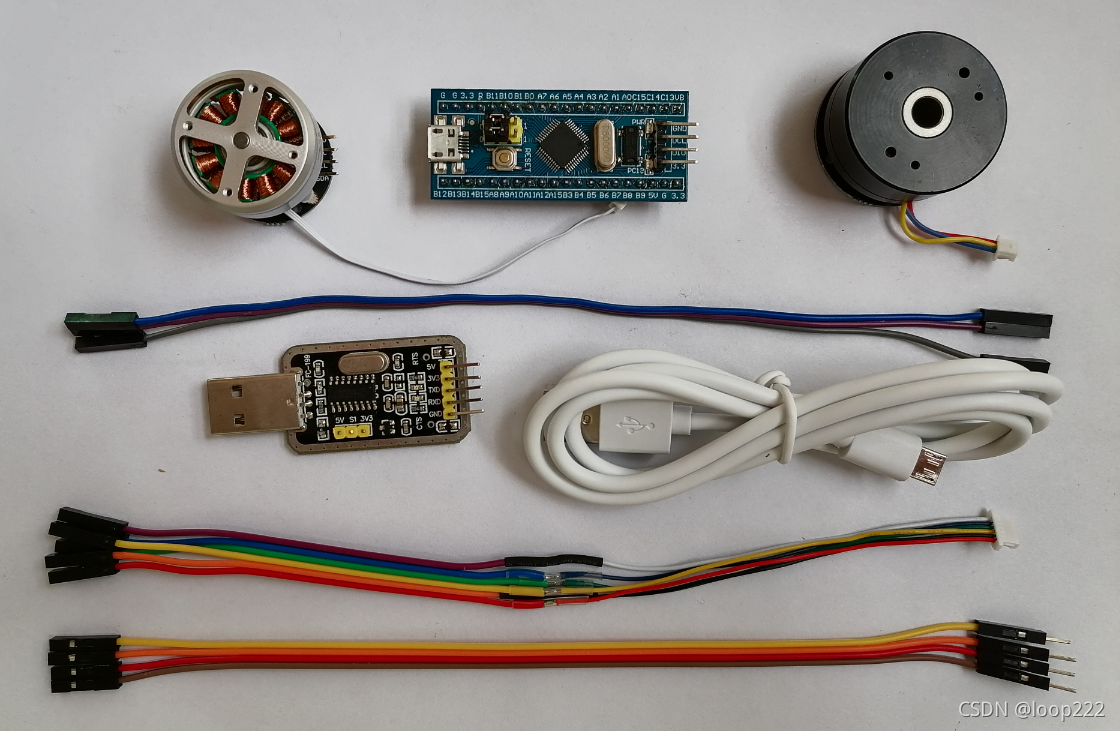
1.1.2、STM32方案
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | STM32核心板 | 1 |
| 2 | 带编码器云台电机 | 2 |
| 3 | USB转串口 | 1 |
| 4 | 5V电源 | 1 |
| 5 | 杜邦线 | 若干 |
两个编码器可以是两个AS5600,也可以是两个TLE5012B,或者一个是AS5600,一个是TLE5012B。
驱动板103 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
1.2、硬件连接
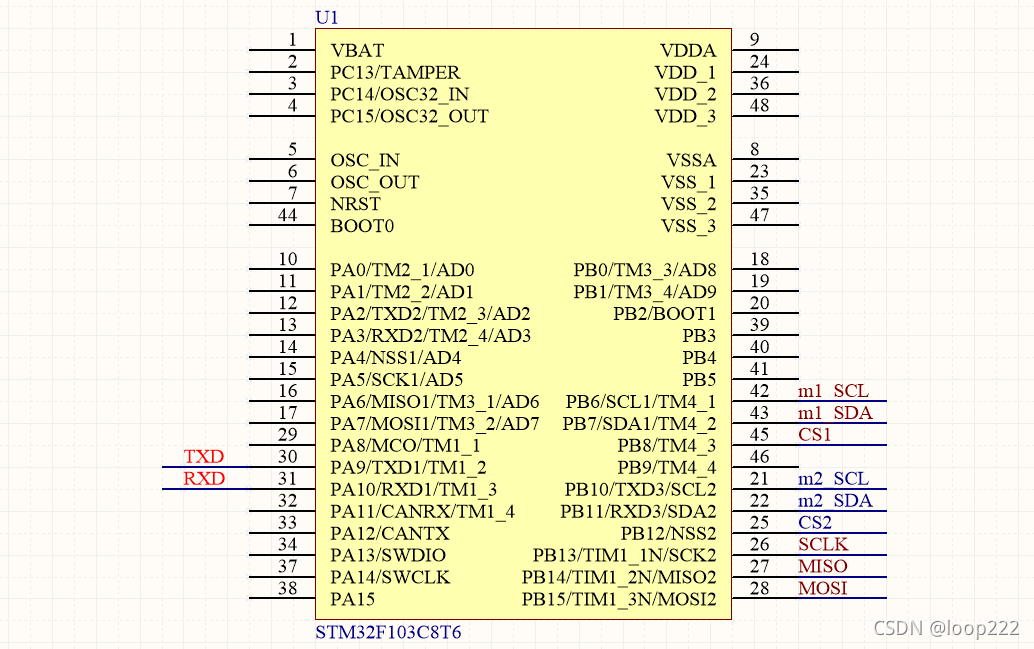
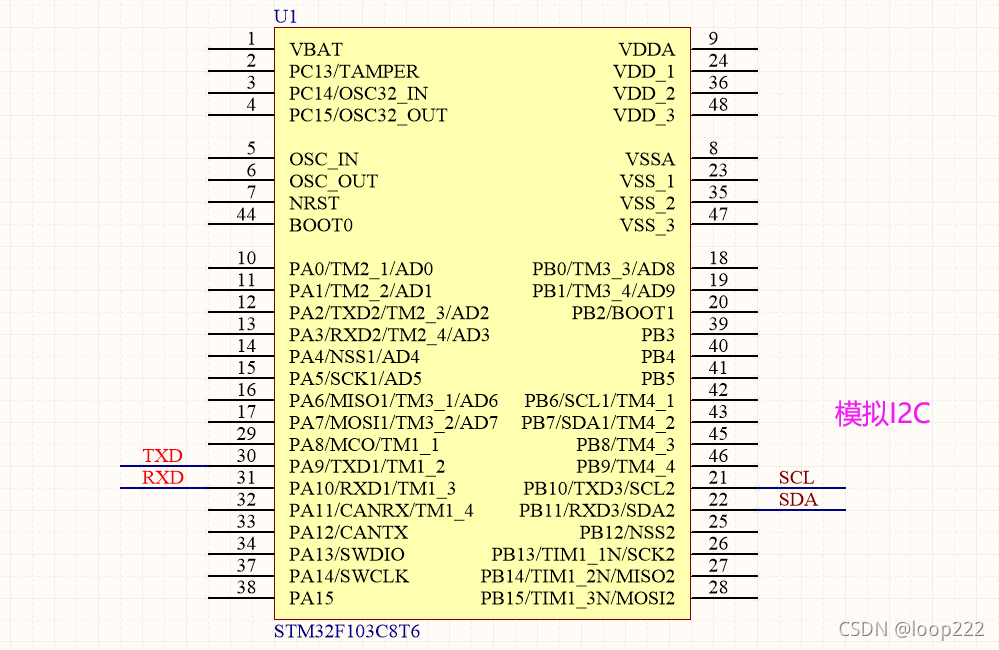
1.2.1、原理图
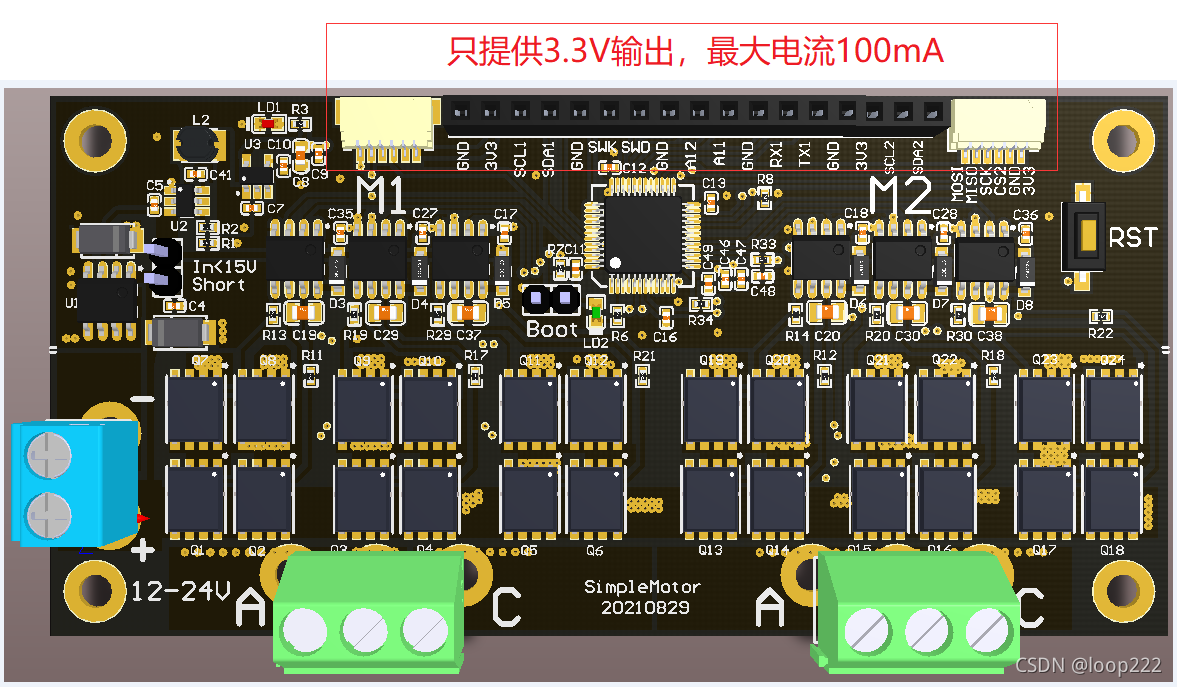
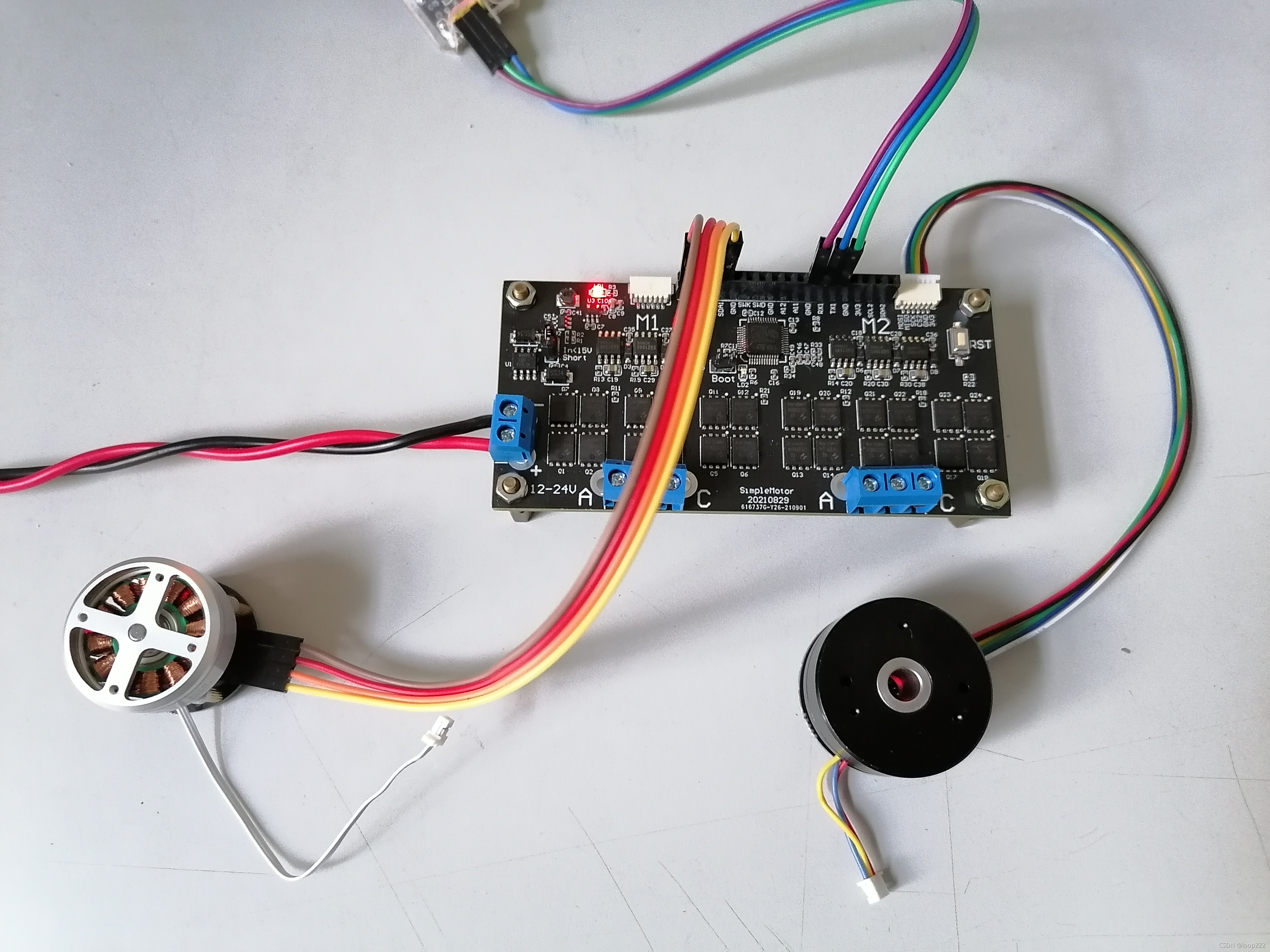
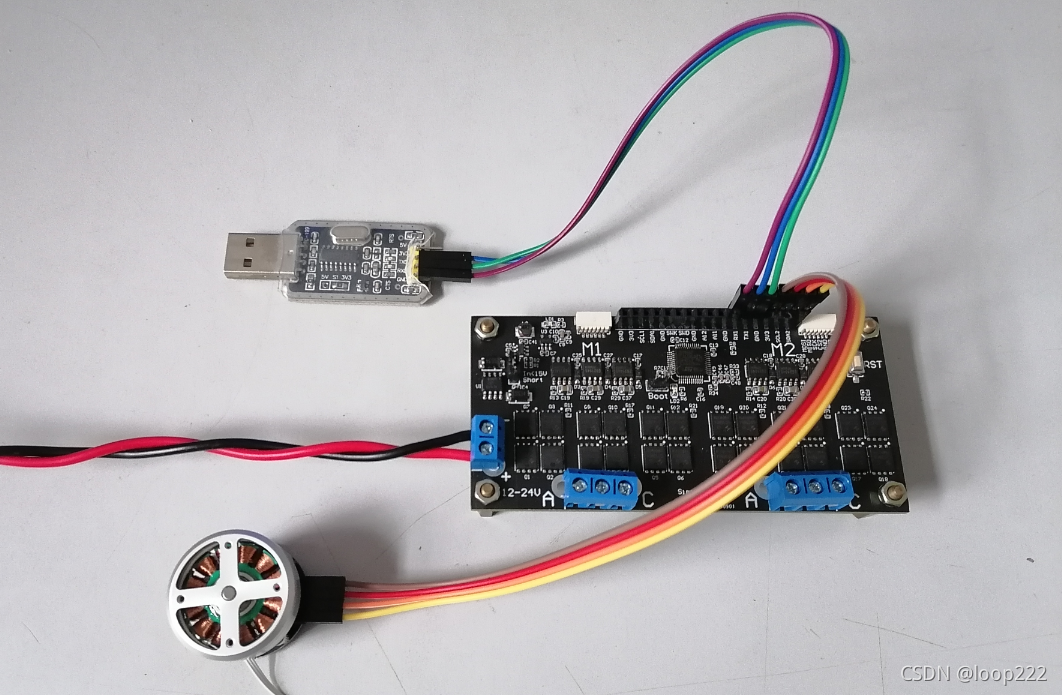
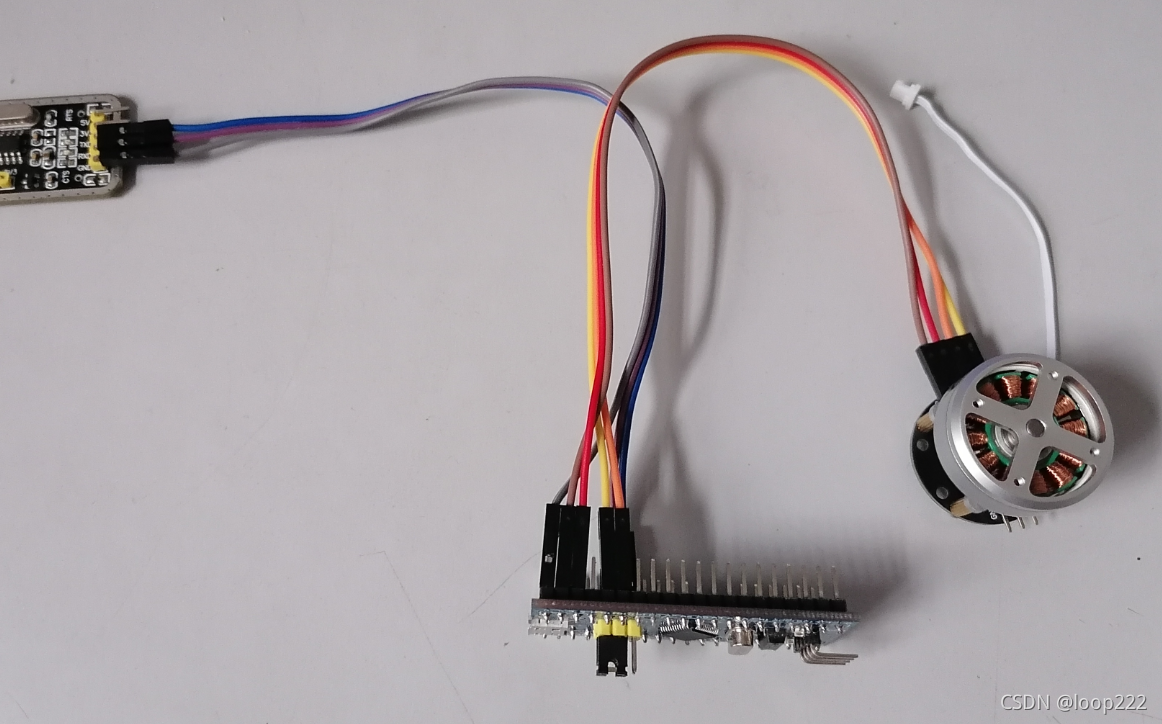
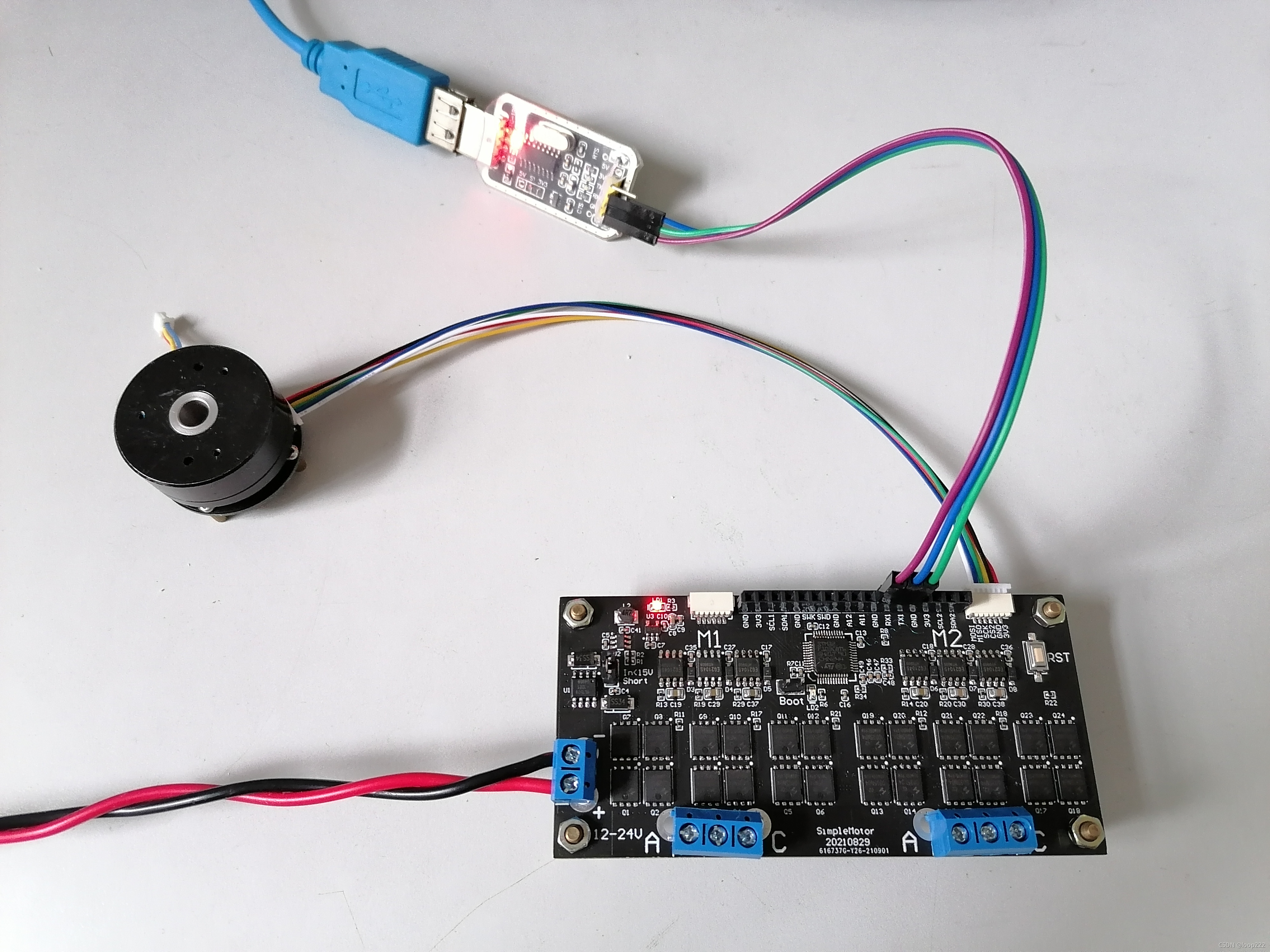
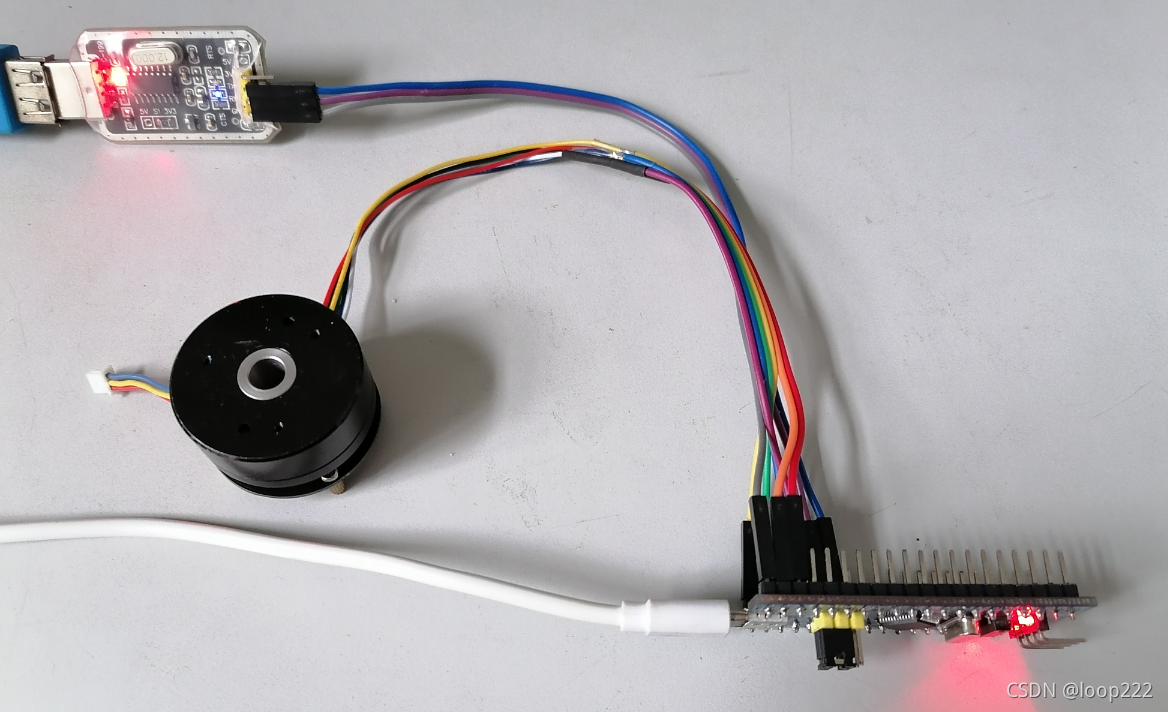
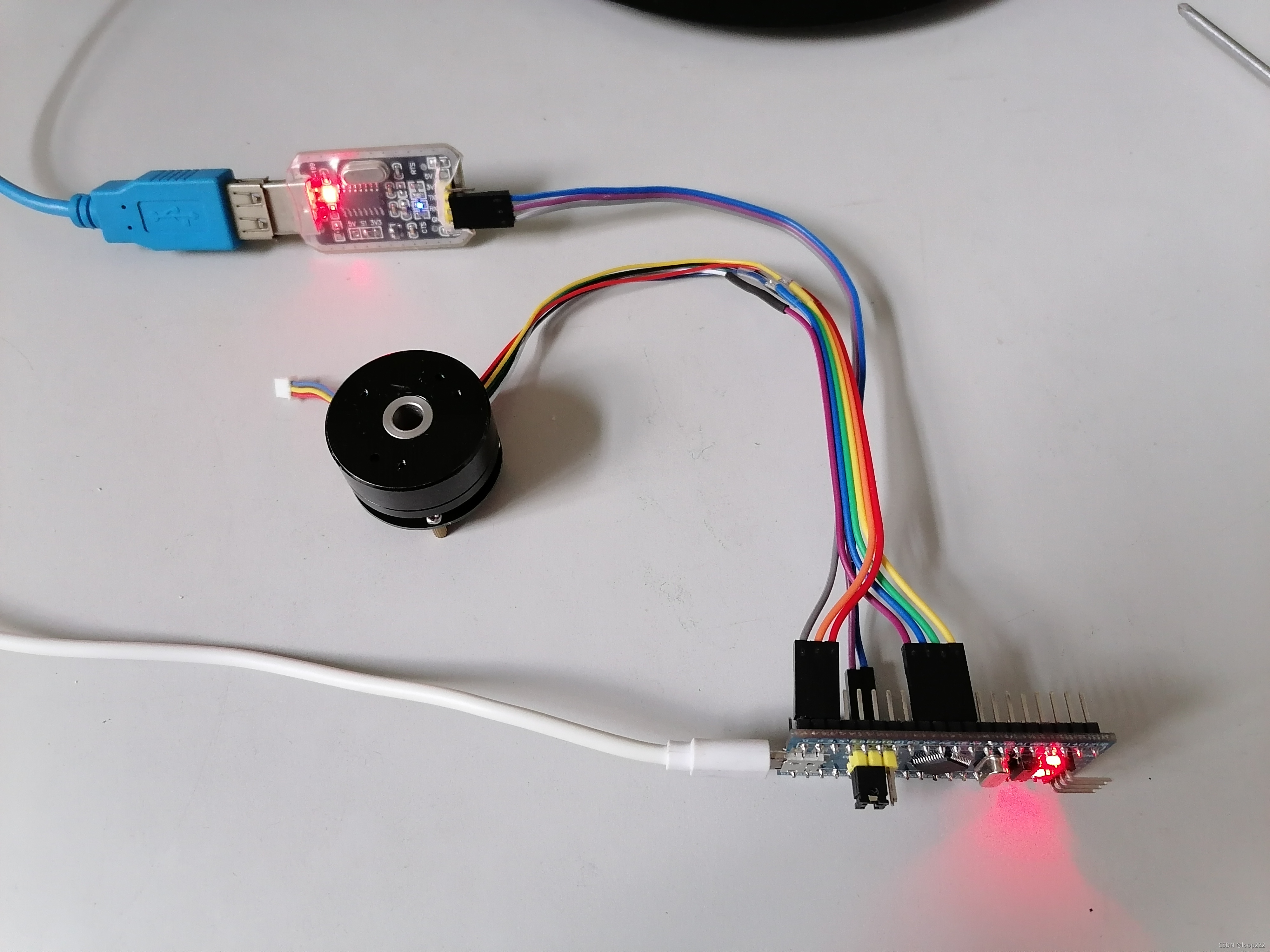
1.2.2、接线
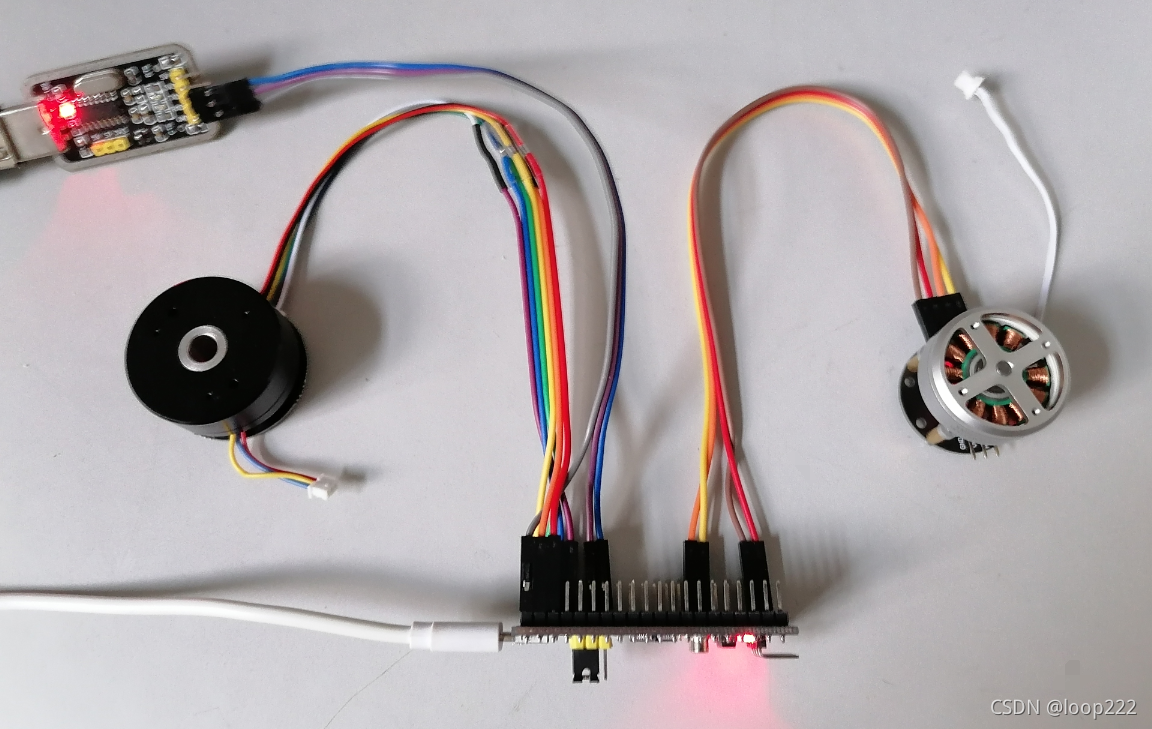
或者
二、代码编译下载
本节代码只演示AS5600和TLE5012B两种编码器,其它编码器请自行移植代码。
2.1、代码解析
1、主循环读角度值,每隔1秒打印一次。可以同时读两个编码器,只需读一个的屏蔽另一个。
如果需要打印速度,可以把屏蔽打开。
2、“MyProject.h”文件中选择编码器型号,1表示使用,0表示不用。只用一个编码器的,可以把不用的都设置为0。

3、上电初始化,根据“MyProject.h”中的宏定义编译。

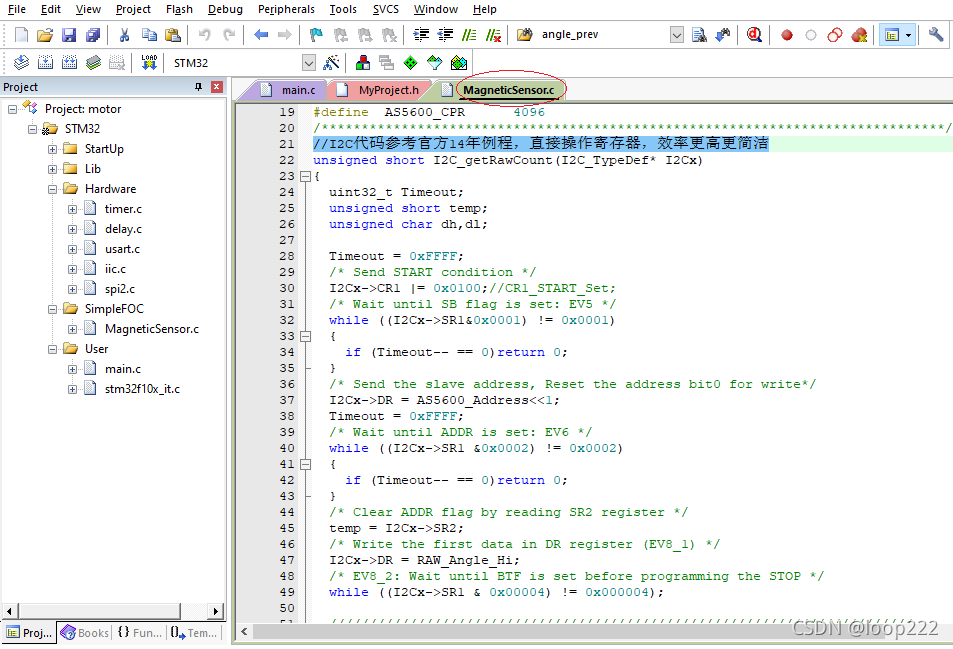
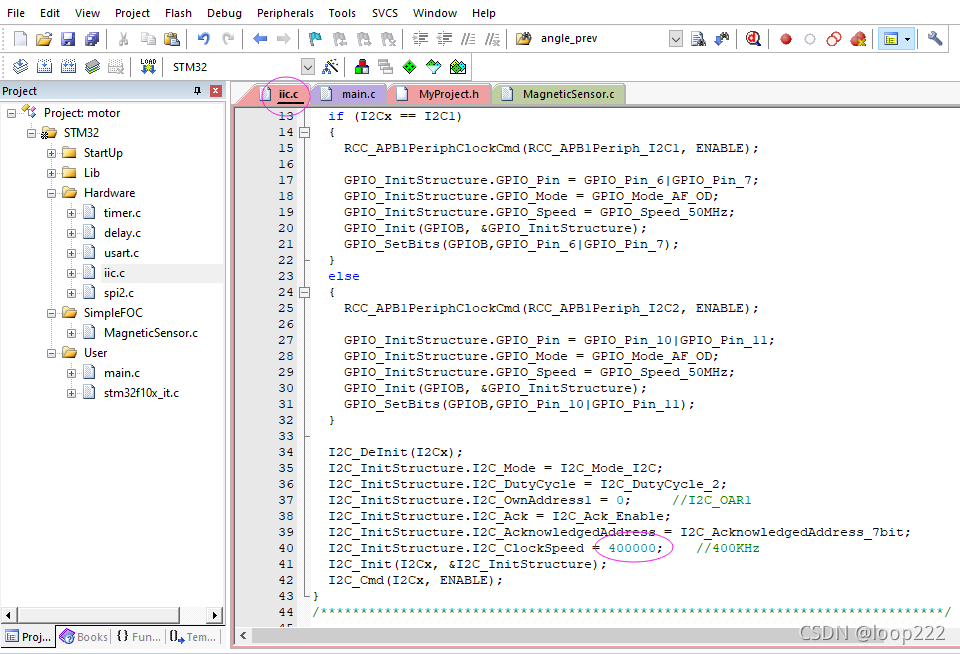
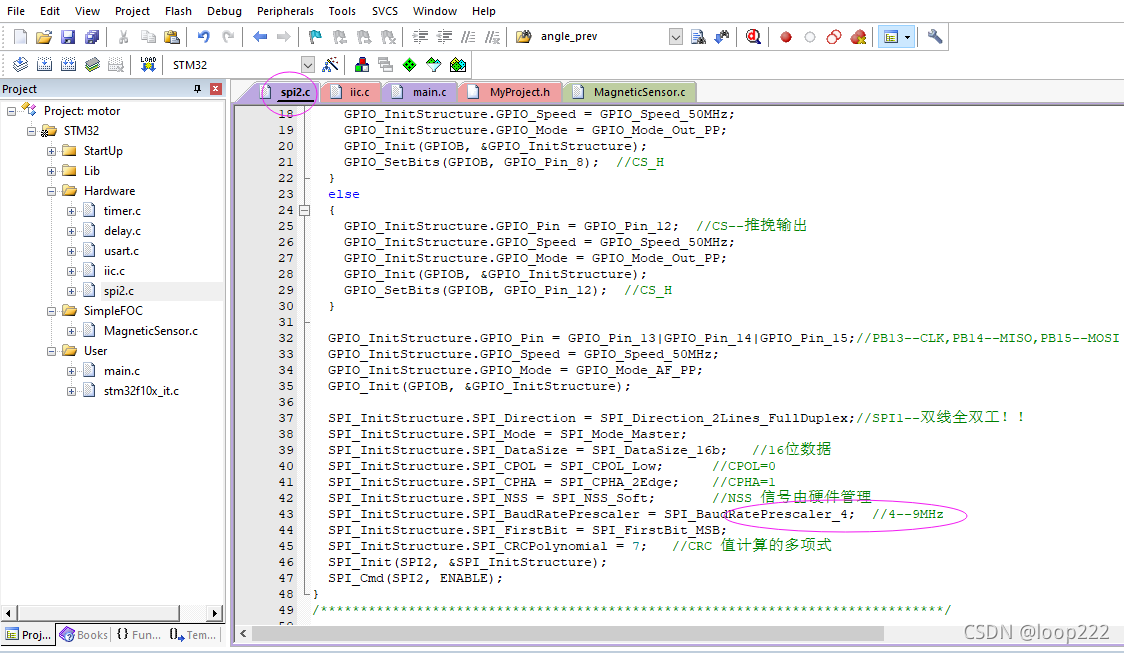
4、需要说明的是I2C读编码器的代码,本节代码采用硬件I2C,支持I2C1和I2C2。STM32的硬件I2C代码网上有很多参考,但是写的比较乱,移植了几个都不能用,在ST官网上找了一个例程,因年代久远,与现在常用的库函数风格不同,都是直接操作寄存器,不过做为底层代码,不会影响大家的体验。
5、ST官网I2C例程,我放在网盘了,有需要的可以下载看看。

6、I2C的波特率是400KHz,SPI波特率是9MHz。
2.2、下载验证
1、根据实际连接的编码器类型,设置“MyProject.h”中的参数,
2、编译下载。串口或者SWD,
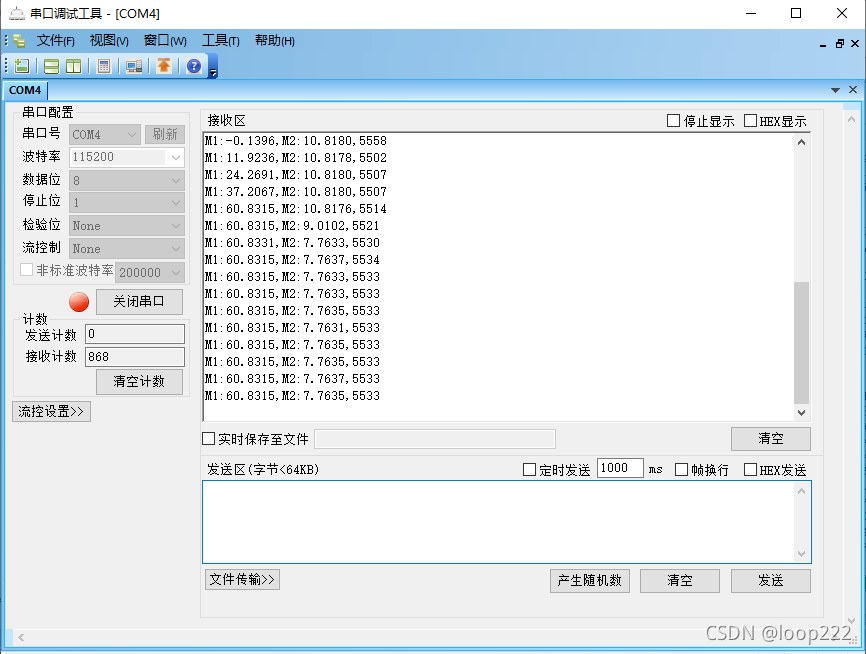
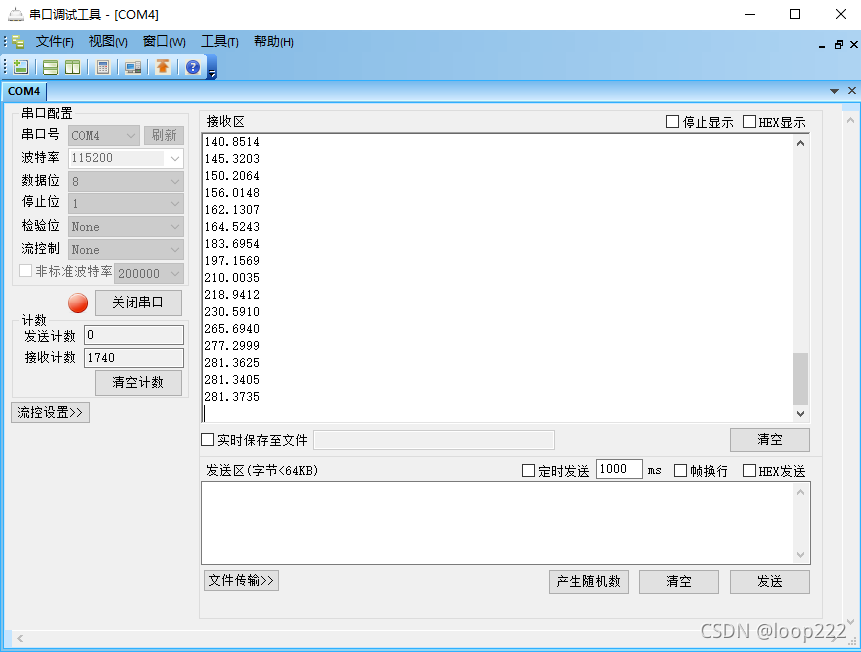
3、转动电机,观察角度变化。(角度的单位是rad,速度单位是rad/s)
2.3、其它说明
1、I2C和SPI速度对比:
- 两个编码器都使用AS5600,主循环3420Hz,
- 两个编码器都使用TLE5012B,主程序15200Hz,
- M1是AS5600,M2是TLE5012B,主程序5530Hz,
- M1是TLE5012B,M2是AS5600,同上
以上数据来自实际测试,会有误差。
2、不同编码器工作电压电流对比:
- AS5600:3.3-5V,6.5mA @max
- TLE5012B:3-5.5V,14mA @Type,
- AS5047/AS5048:3.3-5V,15mA @max
- MA730:3.3V,11.7mA @Type,
以上数据来自各芯片的数据手册。
三、百度网盘代码说明
3.1、AS5600

①、原理图
②、SimpleMotor的I2C2连接
③、也可以用STM32最小系统板连接
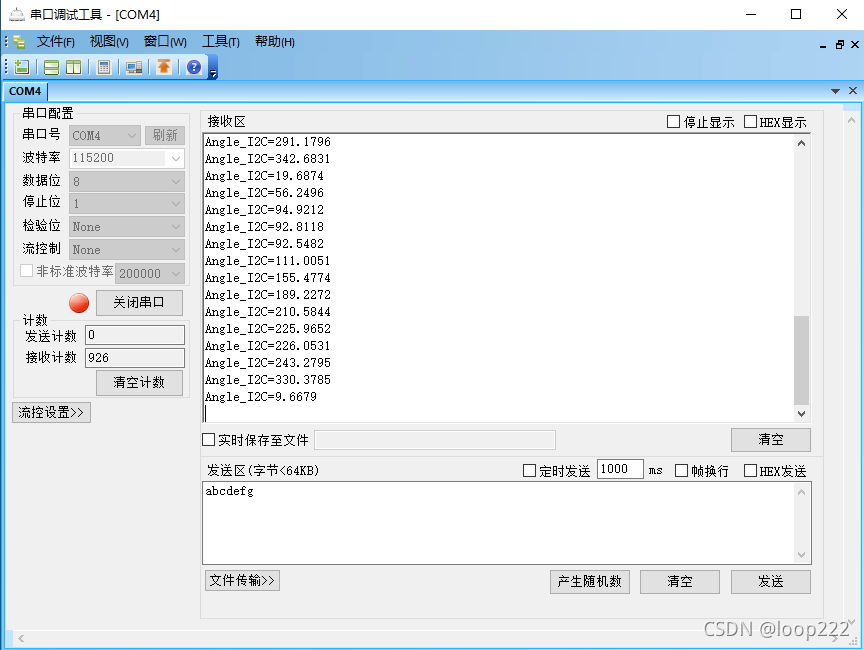
④、串口打印角度0—360°
3.2、AS5047P




3.3、TLE5012B
3.3.1、STM32ReadTLE5012B_spi2_m2
①、原理图
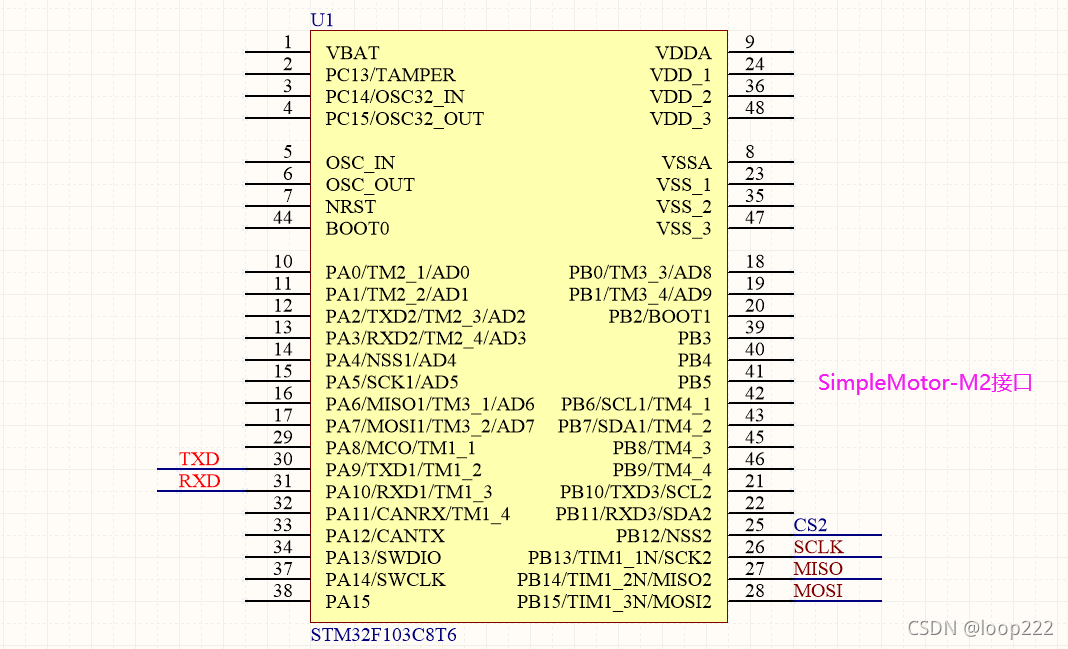
②、SimpleMotor的M2接口连接
③、也可以用STM32最小系统板连接
④、串口打印角度0—360°
3.3.2、STM32ReadTLE5012B_spi2_m1
①、原理图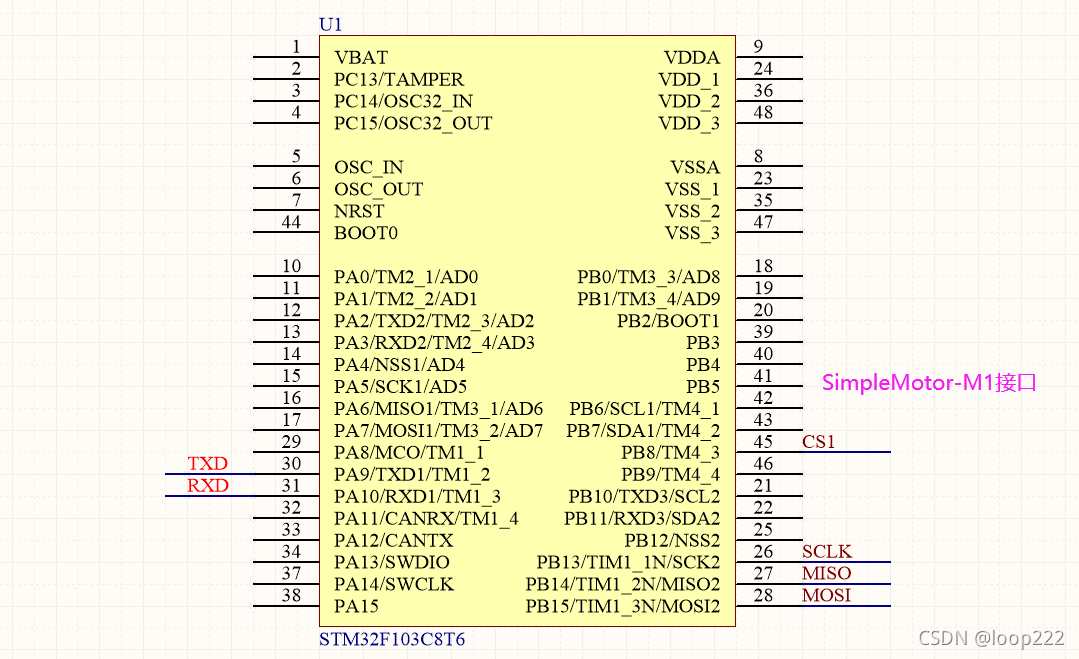
②、SimpleMotor的M1接口连接

③、也可以用STM32最小系统板连接
3.3.3、STM32ReadTLE5012B_spi1
①、原理图
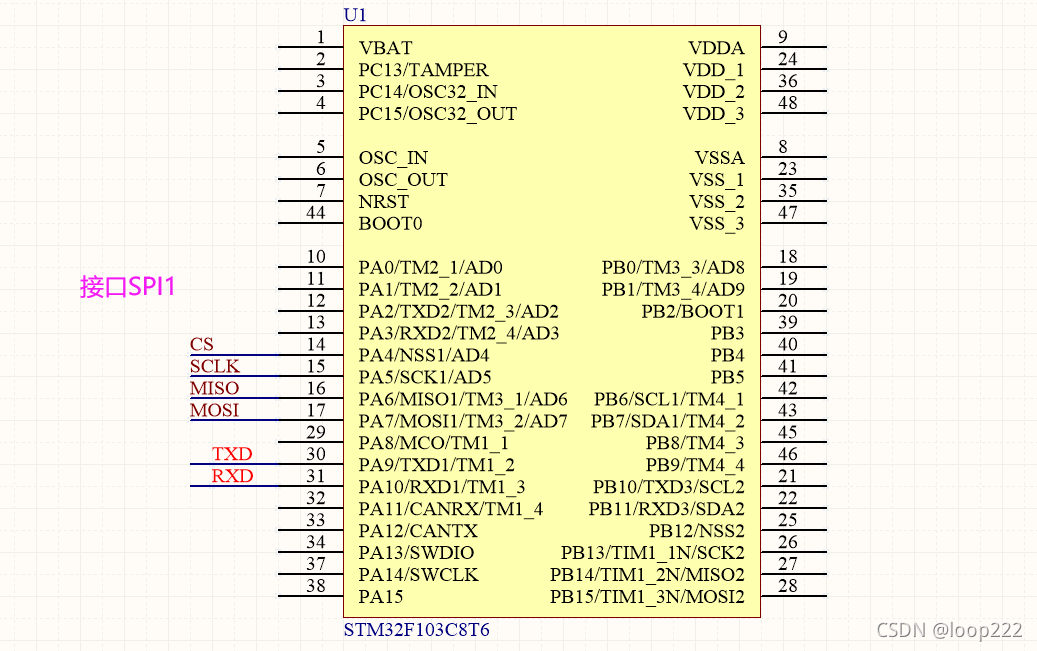
②、不支持SimpleMotor,用STM32最小系统板连接
3.4、MA730

3.5、MT6701

驱动板103 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
每个代码的压缩包解压后有接线图片,可以参考,
每个main.c文件,最上面有单片机的引脚使用说明。

3.6、ABZ
main.c文件,最上面有单片机的引脚使用说明。

(完)
本节源码下载:
链接:https://pan.baidu.com/s/1ueR9a9_uL-Zce_CKTwhawQ
提取码:9qls
欢迎加入simpleFOC技术交流群:923734429 群已满根据提示添加新群 (入群申请写:CSDN)
请继续阅读相关文章:
SimpleFOC移植STM32(一)—— 简介
SimpleFOC移植STM32(二)—— 开环控制
SimpleFOC移植STM32(三)—— 角度读取
SimpleFOC移植STM32(四)—— 闭环控制
SimpleFOC移植STM32(五)—— 电流采样及其变换














 5630
5630











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









