







0. 前言
在讲完激光SLAM和视觉SLAM后,个人感觉目前对这两块的基础剖析已经较为完善了。这一次也想借着这个机会来写一下外参标定相关的东西。因为对于SLAM而言,在实现多传感器融合前,就需要对每个传感器进行标定,以便于融合的精确。
当一个车上装了多个/多种传感器,而它们之间的坐标关系是需要确定的。这个工作可分成两部分:内参标定和外参标定,内参是决定传感器内部的映射关系,比如摄像头的焦距,偏心和像素横纵比(+畸变系数),而外参是决定传感器和外部某个坐标系的转换关系,比如姿态参数(旋转和平移6自由度)。内参这一块作者已经写了一系列文章来介绍相机的标定方法。这里也给出一个链接。这一篇文章我们主要来讲一下外参的标定。
1. 手眼标定
在SLAM领域中,目前不仅仅局限于单个传感器的建图,目前正在向GPS/IMU和摄像头或者激光雷达的标定,雷达和摄像头之间的标定这样多传感器融合的趋势发展。而手眼标定是一个被标定方法普遍研究的,一定约束条件下的问题:可以广义的理解,一个“手”(比如GPS/IMU)和一个“眼”(激光雷达/摄像头)都固定在一个机器上,那么当机器运动之后,“手”和“眼”发生的姿态变化一定满足一定的约束关系,这样求解一个方程就可以得到“手”-“眼”之间的坐标转换关系,一般是AX=XB形式的方程。对于手眼标定而言,其系统分为两种:eye in hand,眼在手上,相机移动以及eye to hand,眼在手外,相机固定
1.1 眼在手上
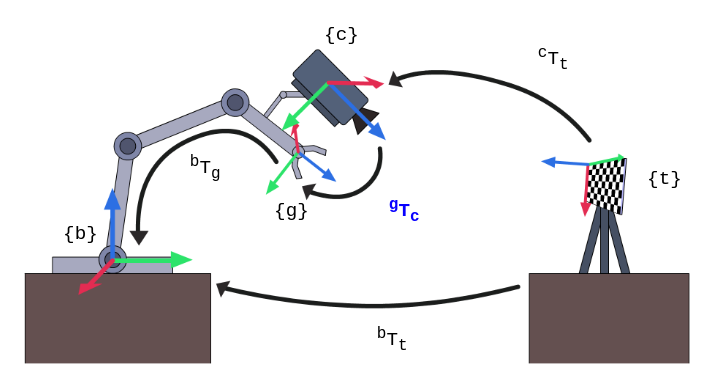
图例说明
- {b}:base基座标系
- {g}:gripper抓手坐标系
- {t}:target标定板坐标系
- {c}:camera相机坐标系
矩阵变化
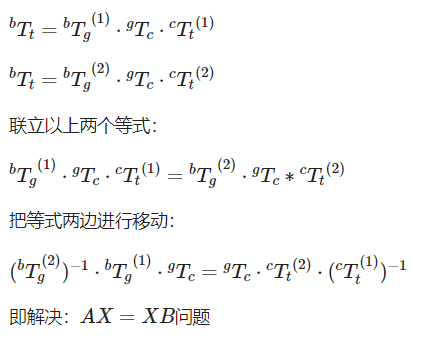
上式中(1)和(2)是指代了在第一个时刻和第二个时刻的坐标系。通过坐标系变换我们可以获得AX=XB形式的问题解决思路。
1.2 眼在手外
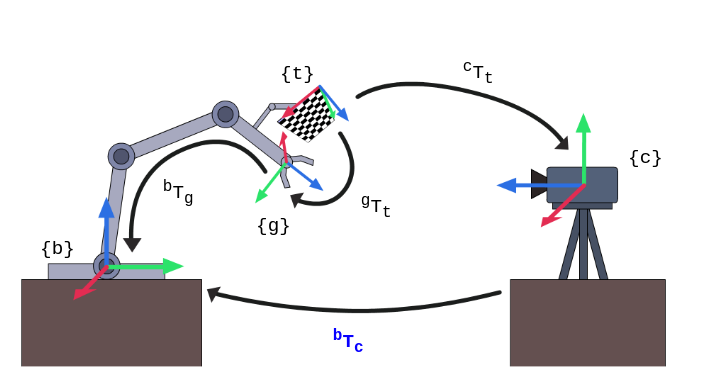
图例说明
- {b}:base基座标系
- {g}:gripper抓手坐标系
- {t}:target标定板坐标系
- {c}:camera相机坐标系
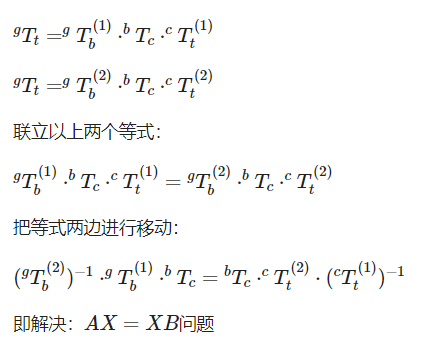
矩阵变化















 9233
9233











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











