







一、Sobel算子
定义:sobel算子是一种基于一阶导数的边缘检测算子。
原理:该算子的主要原理是使用两个3x3的矩阵对原图进行卷积运算,从而计算出该图在水平和垂直方向上的灰度偏差估计值。如下图所示,Gx,Gy分别是对原图A在水平和垂直方向上的灰度偏差近似值。
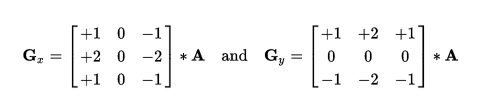
在求得Gx和Gy后,使用下式可以求出图像中每个点的梯度估计值。
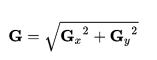
此时需要设定一个阈值,当G的值大于阈值时认为该点为边界点。
二、Laplacian算子(拉普拉斯算子)
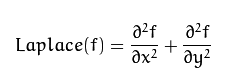
定义:是一种基于图像导数运算的高通线性滤波器。它通过二阶导数来度量图像函数的曲率。
拉普拉斯是一种各向同性二阶微分算子。Laplace算子对孤立像素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。所以,通常的分割算法都是把Laplacian算子和平滑算子结合起来生成一个新的模板。
从Sobel算子可知,在图像中到“边缘”部分,像素值通常出现”跳跃“或者较大的变化。因此这些极值点在求一阶导数时通常都为零。在求二阶导数时,极值点通常为0,因此可以以此检测图像的边缘,但是在图像的噪声部分同样会出现二阶导为0的情况,这也就是为什么拉普拉斯只适用于无噪声的图像。
公式如下:
由于使用的是梯度,因此拉普拉斯算子在opencv的实现时是调用了Sobel算子。
三、Canny算法
Canny 边缘检测算法 是 John F. Canny 于 1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的最优算法, 最优边缘检测的三个主要评价标准是:
低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
最小响应: 图像中的边缘只能标识一次。
canny算法步骤
1.消除噪声。 使用高斯平滑滤波器卷积降噪。 下面显示了一个 的高斯内核示例:
2.计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤:
(1)运用一对卷积阵列 (分别作用于 x 和 y 方向):
(2)使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般 0, 45, 90, 135)
3.非极大值 抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值: 最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
(1)如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
(2)如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
(3)如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
————————————————
版权声明:本文为CSDN博主「草莓夹心」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_37213964/article/details/89245488














 2042
2042











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









