



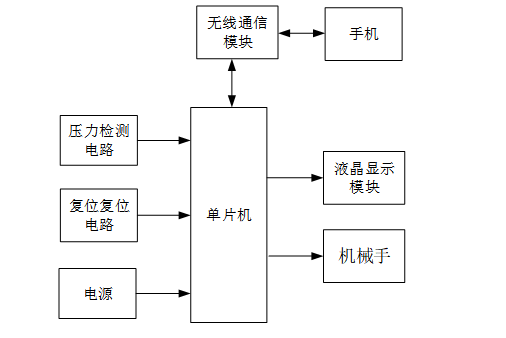
本设计仿生机械手臂电器控制系统的系统架构如图2.1所示,系统采用STM32F103单片机作为控制器,通过四个SG90舵机实现对机械臂的控制,以此实现机械臂的前、后、左、右、上、下、夹紧、松开等不同状态的运动控制,并通过压力传感器检测机械臂的夹紧握力,同时通过OLED液晶显示当前机械臂的坐标信息,同时采用HC05蓝牙模块实现与手机APP的通信。用户可以通过手机APP实现对机械臂的运动控制。
本设计仿生机械手臂电器控制系统的系统架构如图2.1所示,系统采用STM32F103单片机作为控制器,通过四个SG90舵机实现对机械臂的控制,以此实现机械臂的前、后、左、右、上、下、夹紧、松开等不同状态的运动控制,并通过压力传感器检测机械臂的夹紧握力,同时通过OLED液晶显示当前机械臂的坐标信息,同时采用HC05蓝牙模块实现与手机APP的通信。用户可以通过手机APP实现对机械臂的运动控制。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























