







硬解码就是利用硬件芯片来解码的,TX2有单独的解码模块,NVDEC。软解码是用软件程序来解码,比较占用CPU资源。截止当前,nvidia的硬件编码官方提供了nvenc的方法,且在ffmpeg中已经增加了对nvenc的编码库。对于硬件解码,官方提供了基于cuda的解码方法,但是ffmpeg中还没有相应的解码库。
查看cpu gpu 以及编解码模块的使用: sudo ~/tegrastats
首先,要先讨论下为什么需要在OpenCV上用上Gstreamer, 比如我直接一个摄像头 v4l2 图像传给 OpenCV 不行吗?
Gstreamer是嵌入式平台处理Media的首选组件, 像Nvdia/TI/NXP/Rockchip平台, 都是使用Gstreamer来整合Media应用. 在Rockchip平台上, 我们已经有为Gstreamer开发了像Decode/Encode/ISP-Camera/2D加速器/DRM-Display-sink这些的Plugin。所以OpenCV如果链接上Gstreamer,输入源就不仅仅是摄像头, 还可以是RTSP/本地视频;输出显示的代码可以不用写, 让Gstreamer来显示; 转换格式让Gstreamer来转, 利用硬件加速; 处理的图像送回Gstreamer编码。
本文转载自JK Jung的帖子,在本贴中,贴主分享了如何使用python 代码及 OpenCV在Jetson TX2上抓取和显示摄像头视频,包括IP摄像头, USB 网络摄像头和Jetson板载摄像头,这个简单代码也同样可以在Jetson TX1上运行。
准备条件
需要在Jetson TX2上安装 GStreamer 支持的 python和OpenCV(opencv-3.4.0方法)
如果你是用 IP CAM, 你必须构建好,并且知道它的RTSP URI, 比如. rtsp://admin:XXXXX@192.168.1.64:554.
如果你是用USB 网络摄像头(I 使用的是罗技 C920),这个USB摄像头通常安装在 /dev/video1, 因为 Jetson 板载摄像头已经占用了 /dev/video0.
安装 gstreamer1.0-plugins-bad ,这个包含了 h264parse 元素. 这是为了解码来自IP摄像头的H.264 RTSP stream 所需要的(方法:sudo apt-get install gstreamer1.0-plugins-bad)
使用方法
OpenCV安装方法
参照buildOpenCVTX2的sh脚本进行手动编译。
注意-DWITH_GSTREAMER=ON要打开,如果要使用python3,则将-DBUILD_opencv_python3=OFF改为ON
代码下载
在GitHub上下载tegra-cam.py 源代码 ,代码如下
import sys
import argparse
import cv2
WINDOW_NAME = 'CameraDemo'
def parse_args():
# Parse input arguments
desc = 'Capture and display live camera video on Jetson TX2/TX1'
parser = argparse.ArgumentParser(description=desc)
parser.add_argument('--rtsp', dest='use_rtsp',
help='use IP CAM (remember to also set --uri)',
action='store_true')
parser.add_argument('--uri', dest='rtsp_uri',
help='RTSP URI, e.g. rtsp://192.168.1.64:554',
default=None, type=str)
parser.add_argument('--latency', dest='rtsp_latency',
help='latency in ms for RTSP [200]',
default=200, type=int)
parser.add_argument('--usb', dest='use_usb',
help='use USB webcam (remember to also set --vid)',
action='store_true')
parser.add_argument('--vid', dest='video_dev',
help='device # of USB webcam (/dev/video?) [1]',
default=1, type=int)
parser.add_argument('--width', dest='image_width',
help='image width [1920]',
default=1920, type=int)
parser.add_argument('--height', dest='image_height',
help='image height [1080]',
default=1080, type=int)
args = parser.parse_args()
return args
def open_cam_rtsp(uri, width, height, latency):
gst_str = ('rtspsrc location={} latency={} ! '
'rtph264depay ! h264parse ! omxh264dec ! '
'nvvidconv ! '
'video/x-raw, width=(int){}, height=(int){}, '
'format=(string)BGRx ! '
'videoconvert ! appsink').format(uri, latency, width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
def open_cam_usb(dev, width, height):
# We want to set width and height here, otherwise we could just do:
# return cv2.VideoCapture(dev)
gst_str = ('v4l2src device=/dev/video{} ! '
'video/x-raw, width=(int){}, height=(int){}, '
'format=(string)RGB ! '
'videoconvert ! appsink').format(dev, width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
def open_cam_onboard(width, height):
# On versions of L4T prior to 28.1, add 'flip-method=2' into gst_str
gst_str = ('nvcamerasrc ! '
'video/x-raw(memory:NVMM), '
'width=(int)2592, height=(int)1458, '
'format=(string)I420, framerate=(fraction)30/1 ! '
'nvvidconv ! '
'video/x-raw, width=(int){}, height=(int){}, '
'format=(string)BGRx ! '
'videoconvert ! appsink').format(width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
def open_window(width, height):
cv2.namedWindow(WINDOW_NAME, cv2.WINDOW_NORMAL)
cv2.resizeWindow(WINDOW_NAME, width, height)
cv2.moveWindow(WINDOW_NAME, 0, 0)
cv2.setWindowTitle(WINDOW_NAME, 'Camera Demo for Jetson TX2/TX1')
def read_cam(cap):
show_help = True
full_scrn = False
help_text = '"Esc" to Quit, "H" for Help, "F" to Toggle Fullscreen'
font = cv2.FONT_HERSHEY_PLAIN
while True:
if cv2.getWindowProperty(WINDOW_NAME, 0) < 0:
# Check to see if the user has closed the window
# If yes, terminate the program
break
_, img = cap.read() # grab the next image frame from camera
if show_help:
cv2.putText(img, help_text, (11, 20), font,
1.0, (32, 32, 32), 4, cv2.LINE_AA)
cv2.putText(img, help_text, (10, 20), font,
1.0, (240, 240, 240), 1, cv2.LINE_AA)
cv2.imshow(WINDOW_NAME, img)
key = cv2.waitKey(10)
if key == 27: # ESC key: quit program
break
elif key == ord('H') or key == ord('h'): # toggle help message
show_help = not show_help
elif key == ord('F') or key == ord('f'): # toggle fullscreen
full_scrn = not full_scrn
if full_scrn:
cv2.setWindowProperty(WINDOW_NAME, cv2.WND_PROP_FULLSCREEN,
cv2.WINDOW_FULLSCREEN)
else:
cv2.setWindowProperty(WINDOW_NAME, cv2.WND_PROP_FULLSCREEN,
cv2.WINDOW_NORMAL)
def main():
args = parse_args()
print('Called with args:')
print(args)
print('OpenCV version: {}'.format(cv2.__version__))
if args.use_rtsp:
cap = open_cam_rtsp(args.rtsp_uri,
args.image_width,
args.image_height,
args.rtsp_latency)
elif args.use_usb:
cap = open_cam_usb(args.video_dev,
args.image_width,
args.image_height)
else: # by default, use the Jetson onboard camera
cap = open_cam_onboard(args.image_width,
args.image_height)
if not cap.isOpened():
sys.exit('Failed to open camera!')
open_window(args.image_width, args.image_height)
read_cam(cap)
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
板载相机(CSI)
按照下面步骤利用Jetson板载摄像头抓取和显示影像。默认分辨率为 1920x1080 @ 30fps.
python tegra-cam.py
python tegra-cam.py --usb --vid 0 # 这个我也成功了,仅供参考。
USB摄像头
按照下面步骤使用 USB 网络摄像头,并且把分辨率设置为1280x720. 注意‘–vid 1’意思是使用 /dev/video1
python tegra-cam.py --usb --vid 1 --width 1280 --height 720
IP摄像头
按照下面步骤使用IP摄像头,把最后的RTSP URI 参数设置为你自己的IP CAM.
python tegra-cam.py --rtsp --uri "rtsp://192.168.171.199:554/user=admin&password=&channel=1&stream=0.sdp?"
如果使用上述指令报错,则输入以下指令,首先确认相机没有问题,然后再查找其他原因
gst-launch-1.0 rtspsrc location="rtsp://192.168.171.199:554/user=admin&password=&channel=1&stream=0.sdp?" ! rtph264depay ! h264parse ! omxh264dec ! nveglglessink
讨论
这个tegra-cam.py 脚本的关键是依靠GStreamer pipelines 我用来call cv.VideoCapture(). 在我的经验里,使用 nvvidconv 做图像缩放,用BGR做颜色格式转换(注意: OpenCV 需要 BGR 作为最后的输出) 在帧速率方面会有更好效果。
def open_cam_rtsp(uri, width, height, latency):
gst_str = ("rtspsrc location={} latency={} ! rtph264depay ! h264parse ! omxh264dec ! "
"nvvidconv ! video/x-raw, width=(int){}, height=(int){}, format=(string)BGRx ! "
"videoconvert ! appsink").format(uri, latency, width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
def open_cam_usb(dev, width, height):
# We want to set width and height here, otherwise we could just do:
# return cv2.VideoCapture(dev)
gst_str = ("v4l2src device=/dev/video{} ! "
"video/x-raw, width=(int){}, height=(int){}, format=(string)RGB ! "
"videoconvert ! appsink").format(dev, width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
def open_cam_onboard(width, height):
# On versions of L4T previous to L4T 28.1, flip-method=2
# Use Jetson onboard camera
gst_str = ("nvcamerasrc ! "
"video/x-raw(memory:NVMM), width=(int)2592, height=(int)1458, format=(string)I420, framerate=(fraction)30/1 ! "
"nvvidconv ! video/x-raw, width=(int){}, height=(int){}, format=(string)BGRx ! "
"videoconvert ! appsink").format(width, height)
return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
这是我的Jetson TX2用IP摄像头运行tegra - cam的截图。
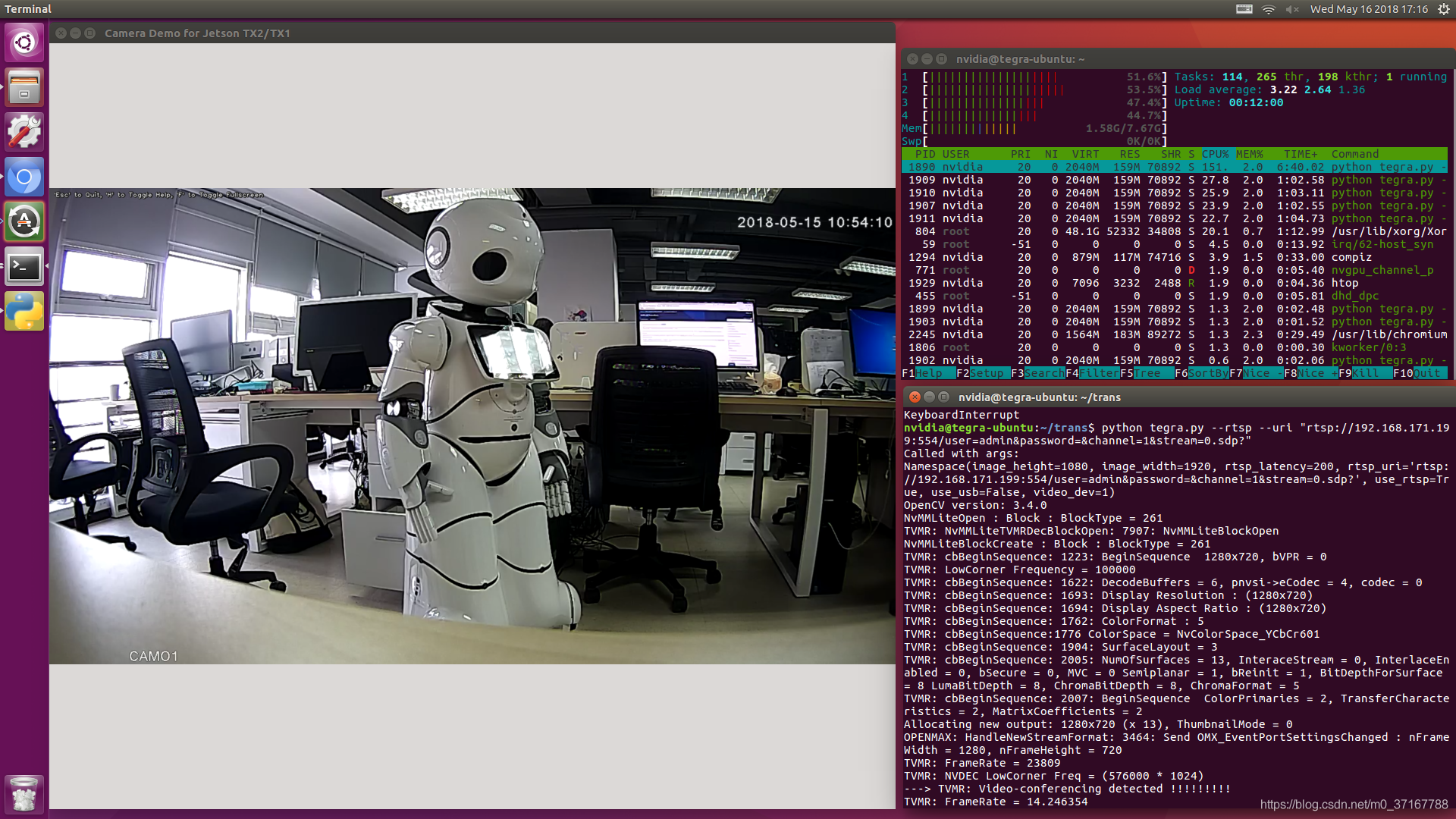
左图是公司高大上的机器人,右图显示了CPU占用情况,实际占用率比较高,与想象中GPU硬解情况不同,还不太清楚是什么原因,需要进一步分析
20180522更新:找到了CPU占用情况高的原因,是因为OpenCV显示占用CPU资源,如果关闭显示,或者将显示的内容变小,则CPU占用情况会下降
20180604更新:感谢楼下maxhn0的提示“cpu占用高的原因是硬解码解码出来的数据格式是nv12(待考证),而调用videoconvert这个插件实际上是在cpu上做的 nv12到 mat类型的bgr转换,这一步是最费CPU的步骤 显示只是gpu占用大”
20180611更新:在开发OpenCV + Gstreamer的过程中, 一定要尽量避免拷贝的发生, 如果一定要有, 也不能是由CPU来做. (替代可以是2D加速器, GPU) (当然这里用2D加速拷出来后buffer,默认还是uncached的,还是不适合CPU直接在上面处理,就算改成cache的,cache刷新的时间也要10ms+。。不过如果你的算法需要CPU去实时处理每帧的话,我想一般的ARM CPU都做不到吧)。根据以上原则, 开发的时候要避免调用到OpenCv的cvtcolor和clone这些函数, 因为每次拷贝都会消耗大量的CPU资源。
Preference
https://jkjung-avt.github.io/tx2-camera-with-python/
http://blog.iotwrt.com/media/2017/08/23/opencv-gstreamer/
https://blog.csdn.net/zong596568821xp/article/details/80306987














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









