







无人驾驶车辆是指在可无需人工干预的情况下,在不可干预、不确定的、开放的交通环境种行驶的车辆。随着科学技术的发展,无人驾驶汽车已经逐渐走入我们的现实生活中。无人驾驶汽车的种类也有很多,例如,如今最常见的‘无人’驾驶汽车是带有防抱死系统的汽车,它并不是真正意义上的‘无人车’,只是在驾驶过程中,汽车可以对驾驶员进行一定的辅助。SEA对无人驾驶技术进行了从L0到L5的分级。目前市场上所见的大多数具有无人驾驶功能的汽车基本上都是L2级别的无人驾驶汽车,即在行驶过程中依然是人类负主要责任的汽车。现今,人们渴望实现L4级别甚至L5级别的无人驾驶,但是由于技术和法律法规的限制,L4和L5级别的无人车的普及还是需要一定的时间的。在无人驾驶汽车的发展上有些人认为实现L4级别的突破是最为关键的,另一些学者认为实现L3级别的突破才是最重要的。根据级别的划分,我们可知L3与L2级别的无人驾驶汽车本质区别在于,在遇到危险前10秒负主要责任的主体是人还是车,L3级别的无人车在这十秒内,是车负主要责任的,L2则是人。
无人驾驶主要包括:环境感知、定位、决策控制这些主要部分,其中行为预测是决策控制中非常关键且非常重要的。只有汽车可以准确的立即而周围环境及交通参与者的意图才能做出安全的决策。预测问题其实是一个概率问题,例如,在一条道路上有一辆红车和蓝车同时争夺路权,在争夺的过程中,我们关心的是如果其中一辆车加速争夺路权,与其他一辆车相撞的概率是多少。在无人驾驶的行为预测领域又分为三种预测,分别是独立预测(只预测被测物体的历史行为,来预测被测实体的未来行为,实际意义不大)依赖预测(基于测试实体及其周围实体的历史行为给出未来可能的行为)回应预测(基于测试实体,及周围实体的是运动,及本车的未来运动来给出被预测实体未来的可能行为)。
目前,关于无人车行为预测的方式有很多,例如神经网络模型和隐马尔科夫链模型。在此我们主要介绍一下隐式马尔科夫链的相关内容。
马尔科夫性:在一个随机过程中,下一个时刻的状态至于当前状态有关,而与之前的状态无关。如果一个随机过程中,任意两个状态之间都满足马尔可夫性,这个过程叫做马尔科夫随机过程。
隐马尔科夫链(HMM)模型可以用五元数组(O,S,A,B,II)
O:观测系列,系统外在可观测的变量
S:隐状态序列,导致系统外在表现变化的内因
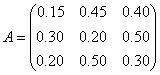
A:状态转移概率,状态转移概率
B:输出概率
II:初始概率分布
HMM-----掷色子
假设赌场里来了一个老千,有两种骰子可以作弊,第一种骰子记为骰子1,掷出较小的点数的概率比较大,骰子2掷出较大的点数的概率比较大,赌场有三种骰子,骰子3为正常的骰子,老千有切换使骰子的习惯,我们不知道每次老千使用的是哪种骰子
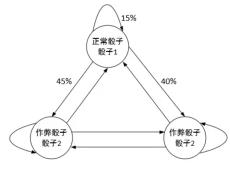
转移概率矩阵:
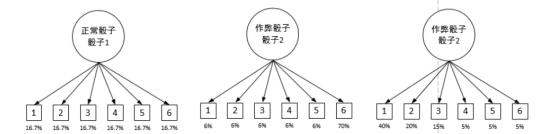
输出概率矩阵
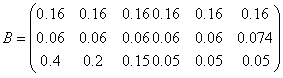
以上的转移概率矩阵和输出概率矩阵就囊括了整个HMM模型,这个模型描述状态转移的所有可能及其概率
用一句话总结HMM模型就是:随着时间不断改变的隐藏状态,他持续影响系统的外在表现
文章所有不足,请多多指教














 922
922











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









