






PS2游戏操纵杆
摇杆模块(双轴按键摇杆)
产品简介:
双轴按键摇杆传感器模块由采用PS2摇杆电位器制作,具有(X,Y)2轴模拟输出,(Z)1路按钮数字输出。配合Arduino传感器扩展板可以制作遥控器等互动作品。另外本产品为了让客户更加方便地配合arduino扩展板等标准接口,在设计上把X,Y,Z轴的电路都单独引出,用户可以使用3引脚的ARDUINO专用线真接插到扩展板上进行使用。
产品性能:
1.输入电压范围:直流3.3V至 5V
2.输出信号:模块特设二路模拟输出和一路数字输出接口,输出值分别对应(X,Y)双轴偏移量,其类型为模拟量;按键表示用户是否在Z轴上按下,其类型为数字开关量。
3.可以通过Arduino控制器编程,传感器扩展板插接,完成具有创意性遥控互动作品。
4.十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。本模块使用5V供电,原始状态下X,Y读出电压为2.5V左右,当随箭头方向按下,读出电压值随着增加,最大到5V;箭头相反方向按下,读出电压值减少,最小为0V。
使用教程:
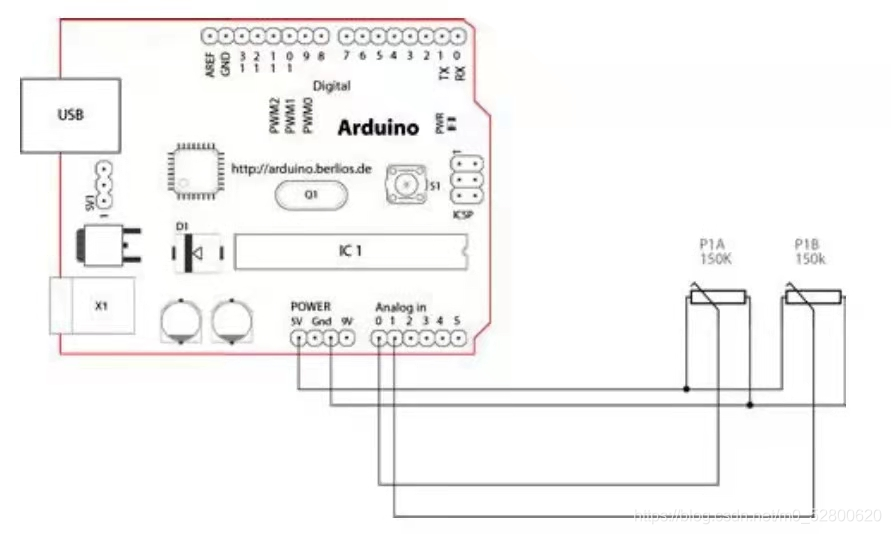
在介绍如何使用前,我们先来看下它的工作原理,这对我们对它的使用很有帮助,下面有一个功能示意图:
其实此模块就是一电位器,x、y维的数据输出就是模拟端口读出的电压值。此图上面没有画出z维的数据输出,z维只输出0和1,通过一按键就能实现。总而言之,它就是电位器和按键的组合体。在Arduino下使用它了,x、y维我们接到两个模拟端口去读它们的值,而z维我们则接到数字口,接上电源和地。
测试程序:
int JoyStick_X = 0; //x
int JoyStick_Y = 1; //y
int JoyStick_Z = 3; //key
void setup() { pinMode(JoyStick_X, INPUT);
pinMode(JoyStick_Y, INPUT);
pinMode(JoyStick_Z, INPUT);
Serial.begin(9600); // 9600 bps
}
void loop() { int x,y,z; x=analogRead(JoyStick_X); y=analogRead(JoyStick_Y); z=digitalRead(JoyStick_Z);
Serial.print(x ,DEC); Serial.print(",");
Serial.print(y ,DEC); Serial.print(",");
Serial.println(z ,DEC);}

















 4594
4594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









