






目录
题目及其要求
考察模块
- 三大金刚:LED,数码管,按键(矩阵键盘)。
- 继电器。
- DS18B20。
分析
1、模块使用分析
- LED
通过位选来实现单个小灯亮灭。
void dis_led(u8 dat)
{
P2=0x80;P0=~dat;P2=0x00;
}- 数码管
通过定时器来实现数码管的动态显示。
if(++smg_count>=2) //2ms数码管扫描
{
smg_count=0;
P2=0xe0;P0=0xff;P2=0x00;
P2=0xc0;P0=T_COM[i];P2=0x00;
P2=0xe0;P0=~t_display[smg_table[i]];P2=0x00;
i++;
if(i==8)i=0;
}- 按键(矩阵键盘)
使用按键的三行代码方法来实现矩阵键盘的使用,并且使用定时器来实现按键消抖。
定时器服务函数中
if(++key_count>=10) //10ms读取键值
{
key_count=0;
key_flag=1;
}矩阵键盘的编写
void Readkey()
{
P3=0xf0;
P44=P42=1;
P36=P42;
P37=P44;
Keypress=P3;
P3=0x0f;
P44=P42=0;
//三行代码
ReadData=(Keypress|P3)^0xff;
Trg=ReadData&(ReadData^Cont);
Cont=ReadData;
}
void dis_key()
{
if(key_flag)
{
key_flag=0;
Readkey();
switch(Trg)
{
case 0x81: //s7--0
.........;//相应按键功能实现代码
break;
case 0x41: //s11--1
.........;//相应按键功能实现代码
break;
case 0x21: //s15--2
.........;//相应按键功能实现代码
break;
case 0x82: //s6--3
.........;//相应按键功能实现代码
break;
case 0x42: //s10--4
.........;//相应按键功能实现代码
break;
case 0x22: //s14--5
.........;//相应按键功能实现代码
break;
case 0x84: //s5--6
.........;//相应按键功能实现代码
break;
case 0x44: //s9--7
.........;//相应按键功能实现代码
break;
case 0x24: //s13--8
.........;//相应按键功能实现代码
break;
case 0x88: //s4--9
.........;//相应按键功能实现代码
break;
case 0x48: //s8--10
.........;//相应按键功能实现代码
break;
case 0x28: //s12--11
.........;//相应按键功能实现代码
break;
case ...:
.......//后面按键类似
}
}
}矩阵按键各个按键对应的键值
| s7----0x81 | s11----0x41 | s15----0x21 | s19----0x11 |
|---|---|---|---|
| s6----0x82 | s10----0x42 | s14----0x22 | s18----0x12 |
| s5----0x84 | s9----0x44 | s13----0x24 | s17----0x14 |
| s4----0x88 | s8----0x48 | s12----0x28 | s16----0x18 |
- 继电器
熟练板子上L10的使用。
注意:继电器和蜂鸣器一定要同时处理,否则会导致蜂鸣器错误使用。
sbit relay = P0^4; //继电器
sbit buzzer = P0^6; //蜂鸣器
P2 = 0xa0; relay = 0; buzzer = 0; P2 = 0x00;//继电器关闭,蜂鸣器关闭
P2 = 0xa0; relay = 1; buzzer = 0; P2 = 0x00;//继电器打开,蜂鸣器关闭- DS18B20
温度传感器,在显示是会出现先显示85然后再显示当前的温度。
解决方法:再主函数的while前加上一句 while((int)DB18b20_Get()==85); //上电不显示85即可。
重点:官方给的资源包中,除了需要自己写读取温度的函数之外,还需进行改动,需在延迟函数中将延时加大8-12倍。
//单总线延时函数
void Delay_OneWire(unsigned int t) //STC89C52RC
{
t*=10;
while(t--);
}需要自己写补充的温度读取函数
//返回温度值
float DB18b20_Get()
{
int high,low;
float temp;
// EA= 0; //关中断
init_ds18b20(); //初始化
Write_DS18B20(0xcc); //跳过ROM
Write_DS18B20(0x44); //转换为温度
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe); //读暂存器
low=Read_DS18B20(); //低字节
high=Read_DS18B20(); //高字节
temp=((high<<8)|low)*0.0625;
// EA=1; //开中断
return temp; //返回温度值
}在题目中要求读取温度时,我们一般使用每100ms读取一次。只有onewrie协议模块时,不用每100ms读取也是可以的,但是如果存在多个协议使用时,需要每100ms读取一次。方法就是在定时器中定时一个100ms的标志位来实现读取就行。ms读取误差不大,和一直读取温度差不多。
2、题目要求分析
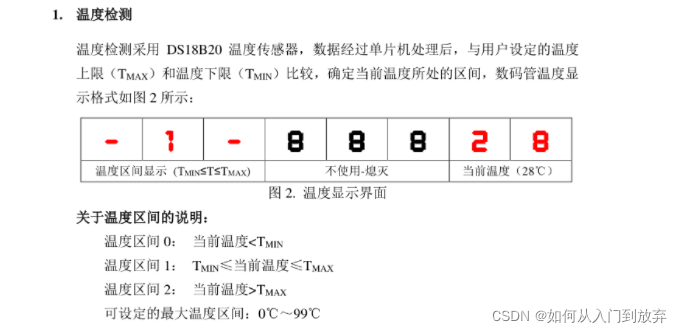
方法:设两个变量:temp_max,temp_min来实现温度的上下限。设变量:section来实现温度区间。
u16 temp_max=30,temp_min=20; //温度上限,温度下限
u16 section; //温度区间 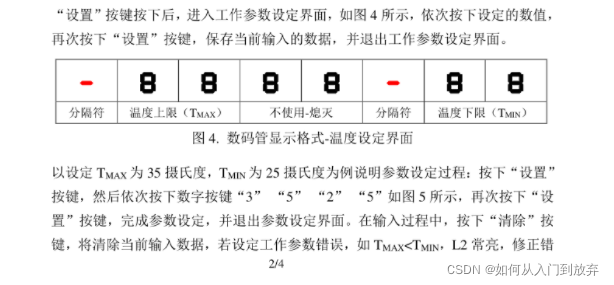
界面:设置一个标志位来实现:set_mode。通过0/1来实现温度设置界面和温度显示界面的跳转。
而设置:我之前想着用eeprom来实现存储,后面想着简单点用数组来存储。工作参数错误可以通过设标志位来实现相应功能的实现。
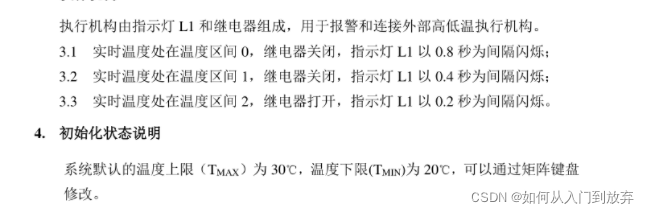
LED
小灯闪烁可以通过定时器设置标志结合小灯位选来实现。
if(time_count++ == 800) time_count = 0;
if(section == 0 && time_count%800 == 0) //0.8s
{
flag_led = ~flag_led;
}
else if(section == 1 && time_count%400 == 0) //0.4s
{
flag_led = ~flag_led;
}
else if(section == 2 && time_count%200 == 0) //0.2s
{
flag_led = ~flag_led;
}
if(flag_led)
{
dis_led(0x01); //L1
}
else
{
dis_led(0x00);
}初始状态很重要:我当时在写的时候将初始温度上下限设置为了:35和25。直到老师提及时才反应过来,初始化状态错了,哎,铁子们一定要看清楚,一定,一定!!!
接下来让我们直接看全部代码
代码
1、主函数
#include<stc15f2k60s2.h>
#include<onewrie.h>
#define u8 unsigned int
#define u16 unsigned char
sbit buzzer = P0^6;
sbit realy = P0^4;
/************* 本地常量声明 **************/
u8 code t_display[]={ //标准字库
// 0 1 2 3 4 5 6 7 8 9 A B C D E F
0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71,
//black - H J K L N o P U t G Q r M y
0x00,0x40,0x76,0x1E,0x70,0x38,0x37,0x5C,0x73,0x3E,0x78,0x3d,0x67,0x50,0x37,0x6e,
0xBF,0x86,0xDB,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF,0x46}; //0. 1. 2. 3. 4. 5. 6. 7. 8. 9. -1
u8 code T_COM[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; //位码
u8 smg_table[]= {16,16,16,16,16,16,16,16}; //black
u8 Keypress,ReadData,Trg,Cont,t; //矩阵键盘
u16 num; //键值
u8 temp_table[]={3,0,2,0}; //存储初始温度值30,20
u16 temp_max,temp_min; //温度上限,温度下限
u16 current_temp;
u16 section; //温度区间
bit key_flag,temp_flag; //按键扫描标志key_flag和温度读取标志temp_flag
bit set_mode;
bit flag_led;
bit set_cun,led_flag2; //保存标志和错误标志
void Close_Peripherals() //关闭外设
{
P2=0xa0;buzzer=0; realy=0;P2=0x00;
P2=0x80;P0=0xff;P2=0x00;
}
void Timer0Init(void) //1毫秒@11.0592MHz
{
EA=1;ET0=1; //开中断
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初值
TH0 = 0xD4; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Time0() interrupt 1
{
static u16 smg_count,key_count,i,temp_count,time_count;
if(++smg_count>=2) //2ms数码管扫描
{
smg_count=0;
P2=0xe0;P0=0xff;P2=0x00;
P2=0xc0;P0=T_COM[i];P2=0x00;
P2=0xe0;P0=~t_display[smg_table[i]];P2=0x00;
i++;
if(i==8)i=0;
}
if(++key_count>=10) //10ms读取键值
{
key_count=0;
key_flag=1;
}
if(++temp_count>=100) //100ms读取温度
{
temp_count=0;
temp_flag=1;
}
if(time_count++ == 800) time_count = 0;
if(section == 0 && time_count%800 == 0) //0.8s
{
flag_led = ~flag_led;
}
else if(section == 1 && time_count%400 == 0) //0.4s
{
flag_led = ~flag_led;
}
else if(section == 2 && time_count%200 == 0) //0.2s
{
flag_led = ~flag_led;
}
}
void dis_led(u8 dat)
{
P2=0x80;P0=~dat;P2=0x00;
}
void LED()
{
if(flag_led)
{
dis_led(0x01); //L1
}
else
{
dis_led(0x00);
}
if(temp_table[0]*10+temp_table[1]<temp_table[2]*10+temp_table[3])
{
led_flag2=1;
dis_led(0x02); //L2
}else{
led_flag2=0;
}
}
void set_temp()
{
if(set_mode) //设置温度上下限
{
temp_table[t]=num;
t++;
t&=0x03;
}
}
void dele()
{
temp_table[0]=16;
temp_table[1]=16;
temp_table[2]=16;
temp_table[3]=16;
t=0; //当按下清除设置键后,设置位回到第一位
}
void Readkey()
{
P3=0xf0;
P44=P42=1;
P36=P42;
P37=P44;
Keypress=P3;
P3=0x0f;
P44=P42=0;
//三行代码
ReadData=(Keypress|P3)^0xff;
Trg=ReadData&(ReadData^Cont);
Cont=ReadData;
}
void dis_key()
{
if(key_flag)
{
key_flag=0;
Readkey();
switch(Trg)
{
case 0x81: //s7--0
num=0; set_temp();break;
case 0x41: //s11--1
num=1; set_temp();break;
case 0x21: //s15--2
num=2; set_temp();break;
case 0x82: //s6--3
num=3; set_temp();break;
case 0x42: //s10--4
num=4; set_temp();break;
case 0x22: //s14--5
num=5; set_temp();break;
case 0x84: //s5--6
num=6; set_temp();break;
case 0x44: //s9--7
num=7;set_temp();break;
case 0x24: //s13--8
num=8; set_temp();break;
case 0x88: //s4--9
num=9; set_temp();break;
case 0x48: //s8--10---设置
set_mode=~set_mode;break;
case 0x28: //s12--11---清除
dele();break;
}
}
}
void dis_smg()
{
if(set_mode==0)
{
if(set_cun)
{
set_cun=0;
temp_max=temp_table[0]*10+temp_table[1];
temp_min=temp_table[2]*10+temp_table[3];
}
smg_table[0]=17;
smg_table[1]=section;
smg_table[2]=17;
smg_table[3]=16;
smg_table[4]=16;
smg_table[5]=16;
smg_table[6]=current_temp/10;
smg_table[7]=current_temp%10;
}
else if(set_mode)
{
set_cun=1;
smg_table[0]=17;
smg_table[1]=temp_table[0]; //温度最大值
smg_table[2]=temp_table[1];
smg_table[3]=16;
smg_table[4]=16;
smg_table[5]=17;
smg_table[6]=temp_table[2]; //温度最小值
smg_table[7]=temp_table[3];
}
}
void main()
{
Close_Peripherals();
Timer0Init();
while((int)DB18b20_Get()==85); //上电不显示85
while(1)
{
dis_key();
dis_smg();
LED();
if(temp_flag)
{
temp_flag=0;
current_temp=DB18b20_Get(); //读取温度
//判断温度区间
if(current_temp<temp_min)
{
section=0;
P2 = 0xa0; realy = 0; buzzer = 0; P2 = 0x00;
}else if(current_temp>temp_max)
{
section=2;
P2 = 0xa0; realy = 1; buzzer = 0; P2 = 0x00;
}else
{
section=1;
P2 = 0xa0; realy = 0; buzzer = 0; P2 = 0x00;
}
}
}
}2、DS18B20
onewrie.c
#include<onewrie.h>
//单总线延时函数
void Delay_OneWire(unsigned int t) //STC89C52RC
{
t*=10;
while(t--);
}
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20设备初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
//返回温度值
float DB18b20_Get()
{
int high,low;
float temp;
// EA= 0; //关中断
init_ds18b20(); //初始化
Write_DS18B20(0xcc); //跳过ROM
Write_DS18B20(0x44); //转换为温度
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe); //读暂存器
low=Read_DS18B20(); //低字节
high=Read_DS18B20(); //高字节
temp=((high<<8)|low)*0.0625;
// EA=1; //开中断
return temp; //返回温度值
}onewrie.h
#include<stc15f2k60s2.h>
sbit DQ = P1^4; //单总线接口
void Delay_OneWire(unsigned int t); //STC89C52RC
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat);
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void);
//DS18B20设备初始化
bit init_ds18b20(void);
float DB18b20_Get();总结
当时写的时候快结束时由于没将led放在100ms里面扫描,导致其他灯会亮,就很烦,最后将小灯放在100ms里面扫描后成功解决这个恶心的问题。让我后面遇到这个问题有了很好的思路。 之前提起的想使用eeprom来实现温度上下限值存储问题,而本次刷题我采用了数组实现。如果后面有时间的化我会尝试下eeprom,加强下多个模块一起使用。














 1893
1893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









