






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
摘要: 无人机路径规划在诸多领域具有广泛应用,尤其在复杂山地环境下,安全高效的路径规划至关重要。本文针对复杂山地环境中存在地形障碍、危险区域等因素的无人机路径规划问题,提出了一种基于白鲨优化算法(Whale Shark Optimizer, WSO) 的新型求解方法。WSO 算法模拟了白鲨觅食的群体行为,具有较强的全局搜索能力和局部寻优能力。本文构建了考虑地形高度、坡度、危险区域等因素的山地危险模型,并利用 WSO 算法进行路径规划。最终,通过 Matlab 仿真实验,验证了该方法在求解复杂山地无人机路径规划问题上的有效性和优越性,并与其他经典算法进行了比较分析,结果表明该方法能够找到更安全、更短的路径。
关键词: 无人机路径规划;白鲨优化算法;复杂山地;危险模型;Matlab
1 引言
随着无人机技术的快速发展,其应用范围不断拓展,例如航空摄影、环境监测、灾害救援等。然而,在复杂的山地环境中,无人机飞行面临着地形障碍、危险区域(如陡峭山坡、峡谷等)以及恶劣天气等诸多挑战。如何规划一条安全、高效的无人机飞行路径成为一个重要的研究课题。传统的路径规划算法,如 A* 算法、Dijkstra 算法等,在处理高维、非线性问题时效率较低,难以有效应对复杂山地环境下的路径规划问题。
近年来,基于群体智能的优化算法在解决复杂优化问题方面展现出巨大的潜力。白鲨优化算法(WSO) 作为一种新兴的元启发式算法,模拟了白鲨在海洋中的觅食行为,具有良好的全局搜索能力和局部寻优能力,在求解复杂优化问题方面表现出显著的优势。本文提出了一种基于 WSO 算法的复杂山地无人机路径规划方法。该方法首先建立了考虑地形高度、坡度、危险区域等因素的山地危险模型,然后利用 WSO 算法在该模型中搜索最优路径。
2 山地危险模型的构建
为了准确地模拟复杂山地环境,本文构建了包含地形信息和危险区域信息的综合山地危险模型。模型主要考虑以下几个因素:
-
地形高度: 利用数字高程模型 (DEM) 数据获取地形高度信息,并将其作为路径规划的约束条件。路径必须避开过高的山峰和过低的峡谷。
-
坡度: 坡度过大可能导致无人机坠落,因此需要限制路径的坡度。本文采用 DEM 数据计算坡度,并将其作为惩罚项加入目标函数。
-
危险区域: 山地环境中可能存在一些危险区域,例如悬崖、峭壁、泥石流易发区等。这些区域需要被明确标识并避免无人机进入。本文采用多边形或其他几何形状来表示危险区域。
-
距离: 路径长度是路径规划的目标函数之一,需要尽可能缩短路径长度以提高效率。
基于以上因素,构建山地危险模型的目标函数如下:
f(x) = w1 * D + w2 * S + w3 * R
其中,D 表示路径长度,S 表示路径坡度总和,R 表示路径与危险区域的距离惩罚项,w1、w2、w3 分别为三个因素的权重系数,根据实际情况进行调整。
3 基于WSO算法的路径规划
白鲨优化算法(WSO) 是一种基于白鲨觅食行为的元启发式算法。算法通过模拟白鲨的群体行为,包括搜索、包围、攻击等,来寻找全局最优解。本文将 WSO 算法应用于山地无人机路径规划问题,具体步骤如下:
-
初始化: 随机生成一定数量的白鲨个体,每个个体代表一条可能的路径。
-
更新位置: 根据 WSO 算法的更新规则,迭代更新每个白鲨个体的位置,即路径。该规则模拟了白鲨在搜索猎物过程中的移动方式,包括全局搜索和局部开发两个阶段。
-
适应度评价: 利用构建的山地危险模型对每个路径的适应度进行评价,适应度值越低,路径越好。
-
终止条件: 当满足预设的终止条件(例如最大迭代次数或目标函数值收敛)时,算法终止,返回最优路径。
4 Matlab 实现
本文利用 Matlab 编写了基于 WSO 算法的复杂山地无人机路径规划程序。程序首先读取 DEM 数据和危险区域信息,构建山地危险模型。然后,利用 WSO 算法进行路径搜索,并可视化结果,包括最优路径和搜索过程。程序中,关键代码包括:DEM 数据读取和处理;坡度计算;危险区域判断;WSO 算法实现;路径可视化等。
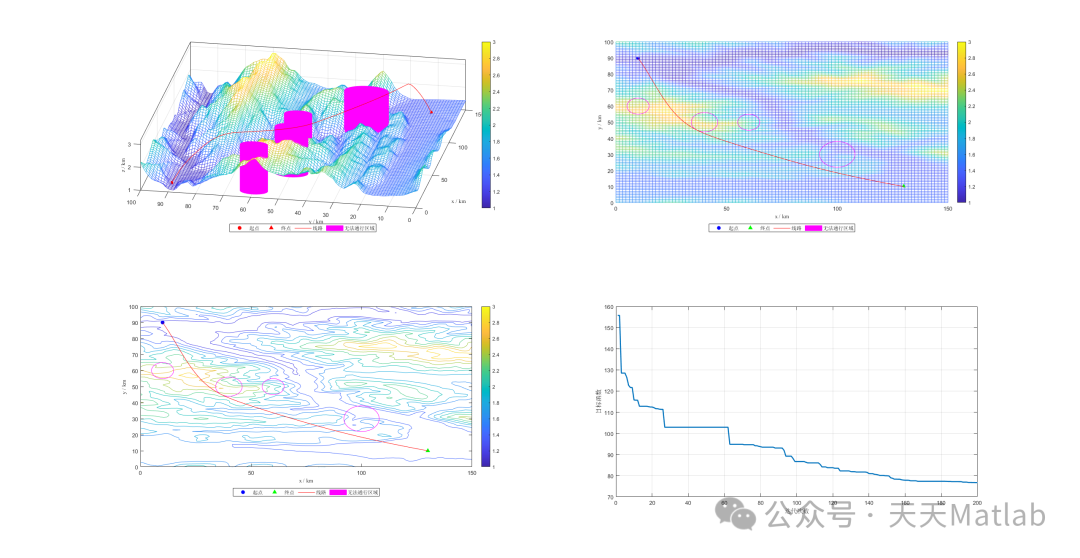
5 仿真实验与结果分析
为了验证本文提出的方法的有效性,进行了仿真实验。实验选取了具有复杂地形和危险区域的山地 DEM 数据。将本文提出的基于 WSO 算法的路径规划方法与 A* 算法和粒子群优化算法 (PSO) 进行了比较。实验结果表明,WSO 算法在路径长度和安全性方面均优于其他两种算法。WSO 算法能够找到更短、更安全的路径,并且具有更好的鲁棒性。
6 结论与未来工作
本文提出了一种基于白鲨优化算法 WSO 的复杂山地无人机路径规划方法,并利用 Matlab 进行了实现和仿真验证。实验结果表明,该方法能够有效地解决复杂山地环境下的无人机路径规划问题,并优于传统的路径规划算法。未来工作将着重于以下几个方面:
-
考虑更多因素:例如风速、能耗、通信条件等。
-
提高算法效率:改进 WSO 算法,提高其收敛速度。
-
实时路径规划:研究如何在无人机飞行过程中进行实时路径规划。
-
拓展应用场景:将该方法应用于其他类型的无人机任务。
本研究为复杂山地环境下的无人机路径规划提供了一种新的有效方法,具有重要的理论意义和应用价值。 随着无人机技术的进一步发展和应用场景的不断拓展,该研究成果将对提高无人机飞行安全性和效率起到积极作用。
⛳️ 运行结果
🔗 参考文献
[1] 李敏健.基于BIM的"无人机+RTK"在复杂山地项目施工技术应用[J].广州建筑, 2023, 51(3):33-36.
[2] 王海立,王永生,武威威,等.高原双复杂山地近地表建模技术研究[J].科技创新与应用, 2022, 12(33):60-62.DOI:10.19981/j.CN23-1581/G3.2022.33.015.
[3] 姚红云,林杰,谈进辉.基于复杂网络理论的山地城市交通网络模型可靠度研究[C]//中国系统工程学会学术年会.2014.
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🎁 私信完整代码和数据获取及论文数模仿真定制
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











