






主要内容:这是我的期中考试,我来记录知识点的,我把期中考过了再继续复习蓝桥杯。
考点1:3个层次的图像处理
数字图像处理的层次:
Low level process:图像处理,输入和输出都是图像。
Middle level process:图像分析,输入是图像,输出是对输入图像进行描述的属性。
属性:边缘,轮廓,以及用于模式识别的特征等。图像分割。
High level process:机器视觉。感知图像,对图像的一个认知:图像识别。
举个例子:
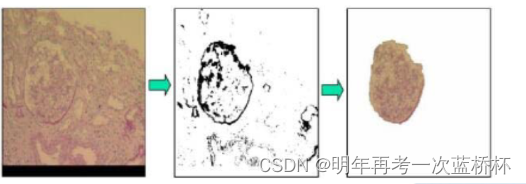
这个就是Low level process(低级处理)

这个就是Middle level process(中级处理)

这个就是High level process(高级处理)。
考点二:采样,量化
大多数传感器的输出是连续电压波形,为了产生一幅数字图像,需要把连续的感知图像转化为数字形式。
这包括两种处理:采样和量化。
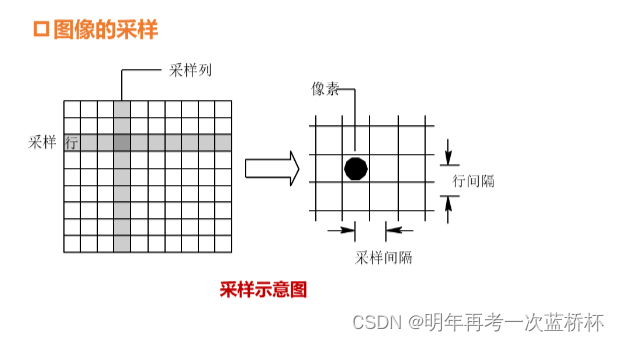
采样:图像空间坐标的数字化。
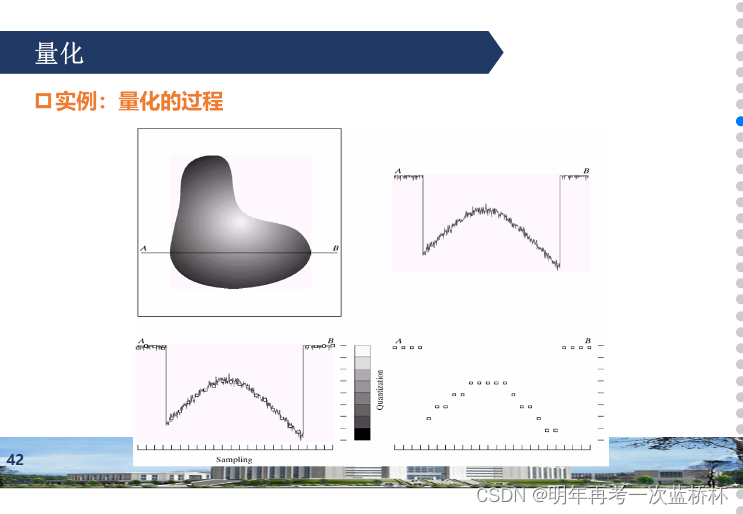
量化:图像函数值(灰度值)的数字化。
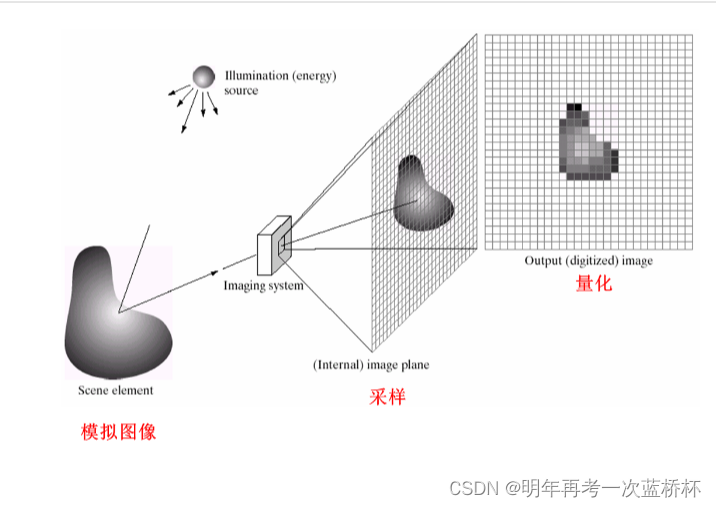
就比如上面这张图,可以看出,采样是图像空间坐标的数字化,而量化是图像灰度值的数字化。
再找几张图片,不然我有点看不懂。
考点三:4连接,m连接,4连通,m连通,8连接,8连通
主要考察像素间的空间关系。
1.相邻像素空间关系:邻域和邻接
图像由像素组成,像素在图像空间上按规律排列,相互之间有一定的联系。
相邻像素:像素的邻域和连接
4邻域,D邻域,8邻域
连通性:4连通,8连通,m连通
距离度量:两个连通像素的距离度量。(为了方便我自己看懂,我逐一记笔记)
相邻像素间的空间关系:4邻域
4邻域:像素p(x,y)的4邻域是:(x + 1,y),(x - 1,y),(x,y + 1),(x,y - 1)
用N4(p)表示像素p的4邻域:
| (x,y + 1) | ||
| (x - 1,y) | p(x,y) | (x + 1,y) |
| (x,y - 1) |
相邻像素:D邻域或对角邻域
D邻域定义:像素p(x,y)的D邻域是:对角线上的点:(x - 1,y + 1),(x + 1,y + 1),(x - 1,y - 1),
(x + 1,y - 1)。用ND(p)表示像素p的D邻域:
| (x - 1,y + 1) | (x + 1,y + 1) | |
| p(x,y) | ||
| (x - 1,y - 1) | (x + 1,y - 1) |
相邻像素:8邻域
像素p的8邻域是:4邻域的点 + D邻域的点
用N8(p)表示像素p的8邻域:N8(p) = N4(p) + ND(p)
| (x - 1,y + 1) | (x,y + 1) | (x + 1,y + 1) |
| (x - 1,y) | p(x,y) | (x + 1,y) |
| (x - 1,y - 1) | (x,y - 1) | (x + 1,y - 1) |
邻接:
像素点p的邻域与该像素存在邻接关系(为了我自己能够记住,每种都写一遍)
4邻接:一个像素与其4邻域中的像素的接触关系,举个例子:
| p | ||
| r |
该例子中的p与r存在4邻接。
对角邻接:
| p | ||
| s |
该例子中p与r存在对角邻接。
8邻接:
| s | ||
| r | p | |
该例子中,p与s存在8邻接,也与r存在8邻接。
2.像素间的连接性
连接:
邻接仅仅考虑相邻像素间的空间关系
连接:空间上邻接且像素点的灰度值相似
两个像素是否连接:
(1)是否接触(邻接);(2)灰度值是否满足某个特定的相似准则:灰度值相等(完全一样)或同在一个灰度值集合中(相似)。
像素间联系:
三种连接:假设V为灰度值集合
1. 4 - 连接
两个像素p和r在V中取值且r在N4(p)中
| 0 | 1 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 1 |
在该例子中,黄色的点和中间的点是4连接的,但蓝色的不是。
2. 8 - 连接
两个像素p和r在V中取值且r在N8(p)中。
| 0 | 1 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 1 |
在这个例子中,黄色的点和中间点是8连接的。
3. m - 连接(混合连接)
2个像素p和r在V中取值,且满足下列条件之一即可。
(1)r在N4(p)中(r,p为4连接);
(2)r在ND(p)中且集合N4(p)与N4(r)的交集是空集(r,p为对角连接,且它们的4连域不相交)(这个集合是由p和r的在V中取值的4 - 连接像素组成的)
| 0 | 1 | 1 |
| 0 | 1 | 0 |
| 0 | 0 | 1 |
当像素间同时存在4 - 连接和8 - 连接时,优先采用4 - 连接,屏蔽两个和同一像素间存在4 - 连接的像素之间的8 - 连接。
3.像素的连通性 - 通路
像素的连通,反映两个像素间的空间关系
(1)通路
一条从具有坐标(x,y)的像素p,到具有坐标(s,t)的像素q的通路,是具有坐标(x0,y0),(x1,y1),(x2,y2),...(xn,yn)的不同像素的序列。
其中,(x0,y0) = (x,y),(xn,yn) = (s,t),(xi,yi)和(xi-1,yi-1)是邻接的,1 <= i <= n,n是路径的长度。
如果(x0,y0) = (xn,yn),则该通路是闭合通路。
通路种类:4 - 通路,8 - 通路,m - 通路
像素的连通:
(2)连通
通路上的所有像素灰度值满足相似准则,即(xi,yi)与(xi-1,yi-1)连接。
种类:4 - 连通,8 - 连通,m - 连通
举个例子:
| 0 | 1 | 1(s) |
| 0 | 1 | 0 |
| 0 | 0 | 1(t) |
像素s和t间,4 - 连通不存在,8 - 连通:两条,m - 连通:一条
考点四:图像基本运算的分类并解释
图像基本运算的分类
按图像处理运算的数字特征,图像基本运算可以分为:点运算,代数运算,逻辑运算,几何运算。
点运算:点运算是指对一幅图像中每个像素点的灰度值进行计算的方法。
代数运算,逻辑运算:代数运算或逻辑运算是指将两幅或多幅图像通过对应像素之间的加减乘除或逻辑与或非运算得到输出图像的方法。
几何运算:几何运算就是改变图像中物体对象(像素)之间的空间位置关系。
从变换性质来分,几何变换可以分为图像的位置变换(平移,镜像,旋转),形状变化(放大,缩小)以及图像的复合变换(多次几何变换级联)等。
一个一个来记笔记吧。
1.点运算的定义 ---- 针对图像像素点进行的运算
设输入图像的灰度为f(x,y),输出图像的灰度为g(x,y),则点运算可以表示为g(x,y) = T[f(x,y)],灰度变换函数。
其中T[]是对f在(x,y)点指的一种数学运算,即点运算是一种像素的逐点运算,是灰度到灰度的运算过程,所以称其为灰度变换函数。
点运算分为线性点运算和非线性点运算
线性点运算的灰度变换函数形式可以采用线性方程描述,即s = ar + b
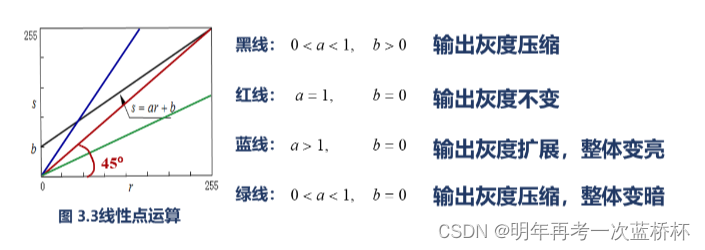
来写几点:
(1)如果a > 1,输出图像的对比度增大(灰度扩展);
(2)如果0 < a < 1,输出图像的对比度减小(灰度压缩);
(3)如果a为负值,亮区域将变暗,暗区域将变亮;
补充几点:点运算不会改变图像内像素点之间的空间位置关系;
2.代数运算
概念:代数运算是指两幅或多幅输入图像之间进行点对点的加减乘除运算得到输出图像的过程,如果记输入图像为A(x,y)和B(x,y),输出图像为C(x,y),则有如下4种形式:
C(x,y) = A(x,y) + B(x,y)
C(x,y) = A(x,y) - B(x,y)
C(x,y) = A(x,y) * B(x,y)
C(x,y) = A(x,y) / B(x,y)
加法运算的主要应用举例:(1)去除叠加性随机噪音;(2)生成图像的叠加效果。
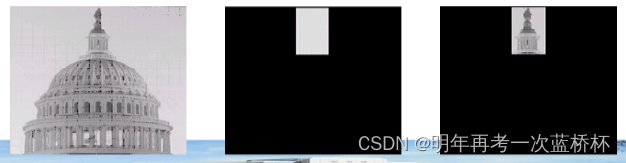
减法运算的主要应用举例:(1)差影法(检测统一场景两幅图像之间的变化);(2)混合图像的分离。
3.逻辑运算
逻辑运算是指两幅或多福图像通过对应像素之间的与或非逻辑运算得到输出图像的方法。
在进行图像理解与分析领域比较有用。运用这种方法可以为图像提供模板,与其他运算方法结合起来可以获得某种特殊的效果。
有以下几种分类:
(1)逻辑非运算
g(x,y) = 255 - f(x,y)
应用1:获得一个阴图像

应用2:获得一个图像的补图像
(2)逻辑与运算
g(x,y) = f(x,y) ^ h(x,y)
应用1:求两个图像的相交子图

应用2:模板运算,提取感兴趣的图像区域
(3)逻辑或运算
g(x,y) = f(x,y) | h(x,y)
应用1:图像的合并

应用2:模板运算,提取感兴趣的图像区域
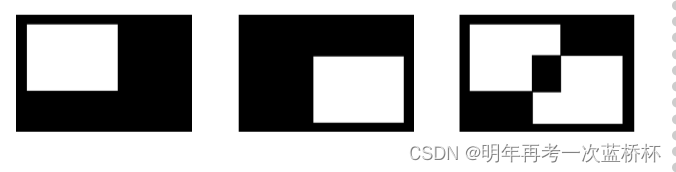
(4)逻辑异或运算
![]()
应用:获得相交图像
4.几何运算
(1)概念
几何运算就是改变图像中物体对象(像素块或点)之间的空间位置关系。
从变换性质来分,几何变换可以分为:图像的位置变换(平移,镜像,旋转),形状变换(放大,缩小),上述变换的复合等变换。
注意:不改变像素值,只改变像素的空间位置。
考点五:频谱图上每个点的意思,能够看懂频谱图
1.频谱图
广义上说,信号的某种特征量随信号频率变化的关系,称为信号的频谱,所画出的图形称为信号的频谱图。
描述各次波振幅与频率关系的图形称为振幅频谱;
描述各次波相位与频率关系的图形称为相位频谱。
举个例子吧。
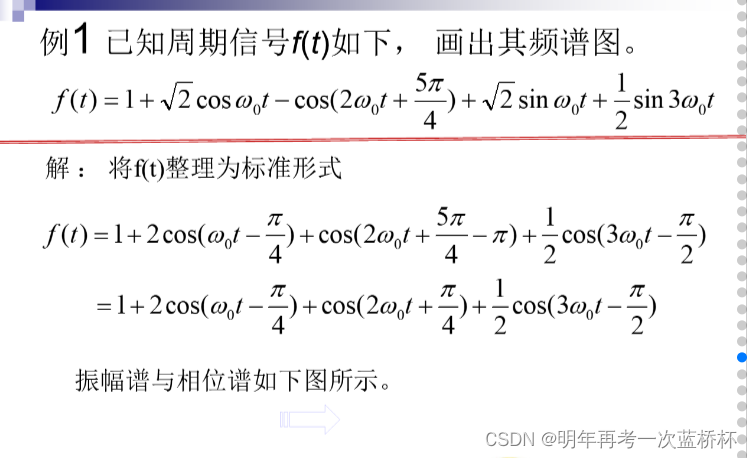
做出的图如下:
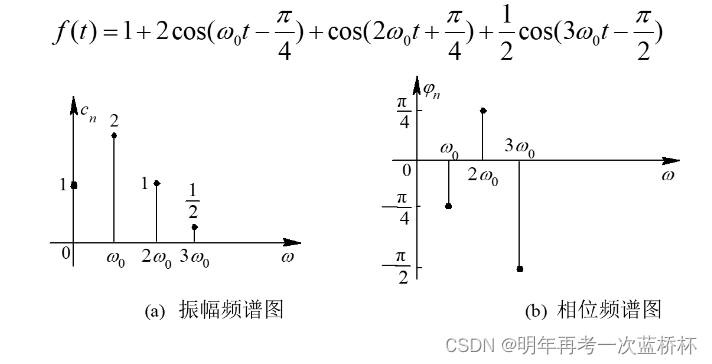
我来写一下自己的方法,由上图所示,我们得到一个三角函数式子(我是这么称呼它的),要把它写成标准形式,就是合并,然后我们发现这个式子里面既有振幅又有相位,所以会得到两幅图,一幅振幅频谱图,一幅相位频谱图,每个式子最外面的系数就是振幅,再把横坐标和纵坐标标好,这就是第一幅图;然后也是同样的道理,不过这次用的是括号里面的值,就可以得到第二幅图了。
整体来讲这个频谱图主要是看看你能不能搞懂这两个图像,根据图像写出表达式,或者根据表达式画出这两幅图,看起来还挺简单的。
2.频谱图上每个点的意义:
频谱图上的点反映了一个波动,也就是整幅图在某个方向上变化的快慢以及大小。
变化快慢:两坐标值的模的大小||(x,y)||或者两个坐标值的大小(x,y)(在x轴和y轴上的分量)
变化的大小:波动的振幅,也就是图像上点的灰度值
变化的方向:中点到它的方向,是平面波的方向
波动就是变化,变化就是波动。
考点六:直方图均衡化
灰度直方图
灰度级直方图是针对图像像素灰度值的一种统计表达,它反映了该图中不同灰度级的像素出现的统计概率。
设图像具有L个灰度级,图像中像素点的总数为n,它的第k个灰度级nk出现的次数是h(k) = nk(k = 0,1,2,...,L - 1),则概率Pr(k) = nk / n。
一.灰度图像的直方图
为了体现它的统计功能,我举个例子。
| 1 | 2 | 3 | 4 | 5 | 6 |
| 6 | 4 | 3 | 2 | 2 | 1 |
| 1 | 6 | 6 | 4 | 6 | 6 |
| 3 | 4 | 5 | 6 | 6 | 6 |
| 1 | 4 | 6 | 6 | 2 | 3 |
| 1 | 3 | 6 | 4 | 6 | 6 |
我们可以得到以下的图:
| 1 | 2 | 3 | 4 | 5 | 6 |
| 5 | 4 | 5 | 6 | 2 | 14 |
简单来讲,第一个6 * 6的表格里面有1,2,3,4,5,6这6个数字,第二个表格存储的就是每个数字在这个表格中出现的次数。
接下来我举一个计算的例子:
假设有一幅总像素为n * n的图像,灰度级数为8,各灰度级分布列于下表中,对其均衡化计算过程及结果如下表。
| 原像灰级 k | 归一化灰级 (rk) | 第k像素级像素个数 | nr(rk) 概率 | Sk 累加概率 | 变换后灰度级 |
| 0 | 0 | 790 | 0.19 | 0.19 | S1 |
| 1 | 0.1428 | 1023 | 0.25 | 0.44 | S3 |
| 2 | 0.2856 | 850 | 0.21 | 0.65 | S5 |
| 3 | 0.4285 | 656 | 0.16 | 0.81 | S6 |
| 4 | 0.5714 | 329 | 0.08 | 0.89 | S6 |
| 5 | 0.7142 | 245 | 0.06 | 0.95 | S7 |
| 6 | 0.8571 | 122 | 0.03 | 0.98 | S7 |
| 7 | 1 | 81 | 0.02 | 1 | S7 |
计算结果表就是这样的,现在我来记录一下我是怎么算出来的。
第一列,题目中说有8个灰度级,所以从0开始写就行了,依次填充0,1,2,3,4,5,6,7;
第二列,来一个归一化处理,计算公式为rk = k / (L - 1),我写一下它的计算过程(按顺序的)
0 / 7 = 0;1 / 7 = 0.1428;2 / 7 = 0.2856;3 / 7 = 0.4285;4 / 7 = 0.5714;5 / 7 = 0.7142;6 / 7 = 0.8571;7 / 7 = 1。这个就是所谓的归一化处理。
第三列,通过统计每个像素级像素的个数,分别填入即可。
第四列,计算概率,就比如790 / (64 * 64)的值约等于0.19,其他值也是这样算出来的
第五列,就是对概率进行累加。
第六列,这个有点技术含量,所用的公式是floor[(L - 1) * Sk + 0.5]
就比如,第一个,7 * 0.19 + 0.5 = 1.8,取整数部分就是1,所以它变换后的灰度级为S1,
第二个,0.44 * 7 + 0.5 = 3.58,取整数部分就是3,其他的就是依次推就可以了。
这就是直方图的计算。
考点七:卷积运算结合一个平滑或者锐化算子
先写个概念
1.概念
空间域滤波采用掩膜矩阵的处理方法对图像进行滤波,去除图像噪声或增强图像细节,这就是图像的卷积运算。
我只会一种题目,如下:有一个原始图像:
| 2 | 2 | 2 | 2 |
| 2 | 2 | 2 | 2 |
| 2 | 2 | 2 | 2 |
| 2 | 2 | 2 | 2 |
此时题目会给你一个卷积核:
| -1 | -1 | -1 |
| -1 | 8 | -1 |
| -1 | -1 | -1 |
此时是怎么计算的呢,继续往下看。
因为卷积核是3 * 3的,所以我们也是3 * 3的来,先取局部:
| 2 | 2 | 2 |
| 2 | 2 | 2 |
| 2 | 2 | 2 |
分别对应相乘:
| 2 * (-1) | 2 * (-1) | 2 * (-1) |
| 2 * (-1) | 2 * (8) | 2 * (-1) |
| 2 * (-1) | 2 * (-1) | 2 * (-1) |
然后算出它的值,具体如下:
2 * (-1)* 8 + 2 * 8 = 0,这就是算出的第一个值。
(先说好,我只是图方便,随便写的矩阵,不一定科学,只是为了展示怎样计算的)
然后剩下的数字也是这么算出来的。
我就只会写这么多。
下一篇我打算写一下这次的省赛题,我这次考的并不理想,但是我还会继续学算法,明年继续!















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









