






参考资料:
Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)
零基础学习ROS机器人操作系统
ROS.org
清华大学开源软件镜像站
1. 安装环境
主机系统:Win10
虚拟机软件:VMware 15.5
虚拟机系统:Ubuntu18.04
2. 安装ROS
本篇博客主要根据ROS的wiki官网中的步骤进行安装。
提前说一下,各位不要仅仅看着这篇博客进行安装,请打开ROSwiki和 清华大学开源软件镜像站,然后参照着本篇博客进行安装。因为官方的安装教程一直在更新,此篇博客的命令行可能2021年还能用,但过几年甚至过几个月就不能用了,所以请主要参考官方教程。
2.0 选择ROS版本
首先打开ROSwiki的官网。点击Install。

根据虚拟机的系统版本(Ubuntu18.04),选择ROS Melodic Morenia进行安装。

接下来选择平台,我们选择Ubuntu平台即可。

弹出的网址给出了安装所需的所有步骤,接下来本篇博客就按照网址中的步骤进行逐步安装。
2.1至2.3 用清华镜像代替官网安装源
由于教程中有一些网址是被墙的,为了解决这个问题,本博客的安装步骤与官网的安装步骤在细节上会有些许差异。

在官网给出的安装步骤1.2中,那个网址是被墙的,因此我们选择用清华大学开源软件镜像站中的网址来代替。
打开清华大学开源软件镜像站。

在镜像列表中找到ros,然后点击ros后面的问号,一定要点击ros后面的问号,而不是ros。

点击之后,弹出了ROS镜像使用帮助,也是有很详细的步骤的。接下来我们就按照这个步骤来操作。

在正式操作之前,如果你的Ubuntu还没有更换软件安装源,请按如下步骤操作,更换过的请跳过。
2.1.1 Ubuntu更换软件安装源
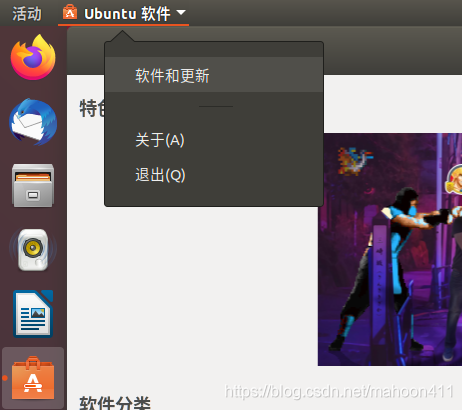
首先打开Ubuntu软件。

然后点击软件和更新。
然后将下载自后面的源,选择其他,然后选择aliyun,最后点击选择服务器。
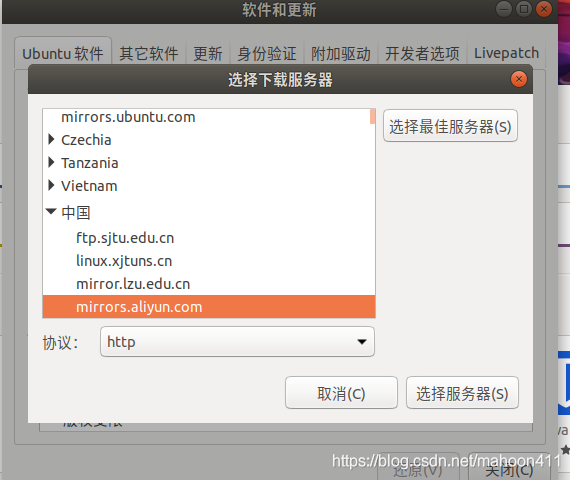
选择好后,退出软件和更新时,系统会提示更新缓存,同意即可,更新缓存完毕后,软件安装源即更换成功。

2.1.2 按照ROS镜像使用帮助配置ROS 的安装源
打开终端,按照ROS镜像使用帮助中的第一步操作,更改文件内容。

这里使用vim编辑器进行编辑,若没有安装vim编辑器,安装即可。

将内容复制粘贴至文件内,然后保存文件即可,若不会vim操作,请参考:Linux vi/vim命令大全

接着按照指令操作。

要一步一步操作。


执行完毕并且没有报错后,返回ROSwiki的官网教程,可以发现,我们已经完成了官网教程的1.1到1.3步了,1.4步开了个小头。
2.4 安装ROS桌面完整版

这里我们执行安装桌面完整版的代码。

执行后如下图所示。

执行完语句后,不报错或者没有任何提示,算是安装成功。
这里是第一个坑,有时只执行一次上述命令,不能完全安装,甚至会安装失败。
解决办法就是多执行几次这个命令,直至没有报错。如下图所示,系统提示我已经是最新版,说明安装成功。

2.5 配置并激活环境变量
接下来进行环境变量的配置,按照教程一步一步操作。

首先执行教程中的第一行命令,添加环境变量。

添加完成后我们可以利用vim查看一下这个bashrc文件,看看是否添加成功。

新添加的环境变量在文件的最后一行。可以看到,添加成功。

然后输入教程中的第二行命令,使其生效。

2.6 构建包依赖关系
接下来进入构建包依赖关系的步骤。

首先执行教程中的第一段命令。

然后执行第二段命令。

接着进行初始化。提前说一下,这里是第二个坑,报错现象是sudo rosdep init 或者rosdep update 连接错误,解决办法请参考这篇文章:已解决:sudo rosdep init 或者rosdep update 连接错误的解决办法
如下图,虽然初始化成功,但是更新失败。


不过这个问题的影响不是特别大,我们这里先跳过这个问题,直接查看ROS是否安装成功。
3. 检查ROS是否安装成功
这里我们通过一个经典的例程来检验ROS是否安装成功。
首先输入roscore。

然后再打开一个终端(快捷键: Ctrl+Shift+T ),输入rosrun turtlesim turtlesim_node。系统会弹出一个窗口,窗口的中间有一只海龟。
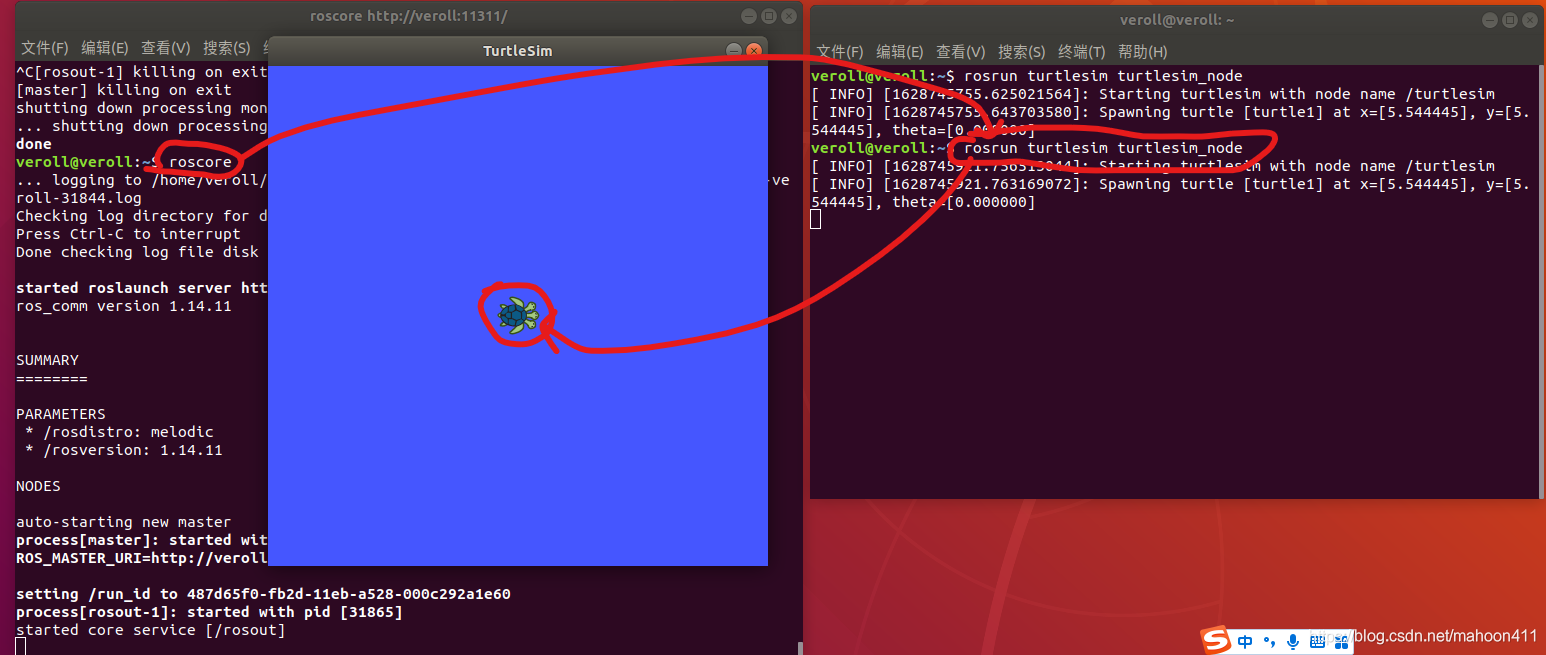
然后再打开一个终端(快捷键: Ctrl+Shift+T ),输入rosrun turtlesim turtle_teleop_key。这时按照窗口中的提示就可以驱动小海龟进行运动了。
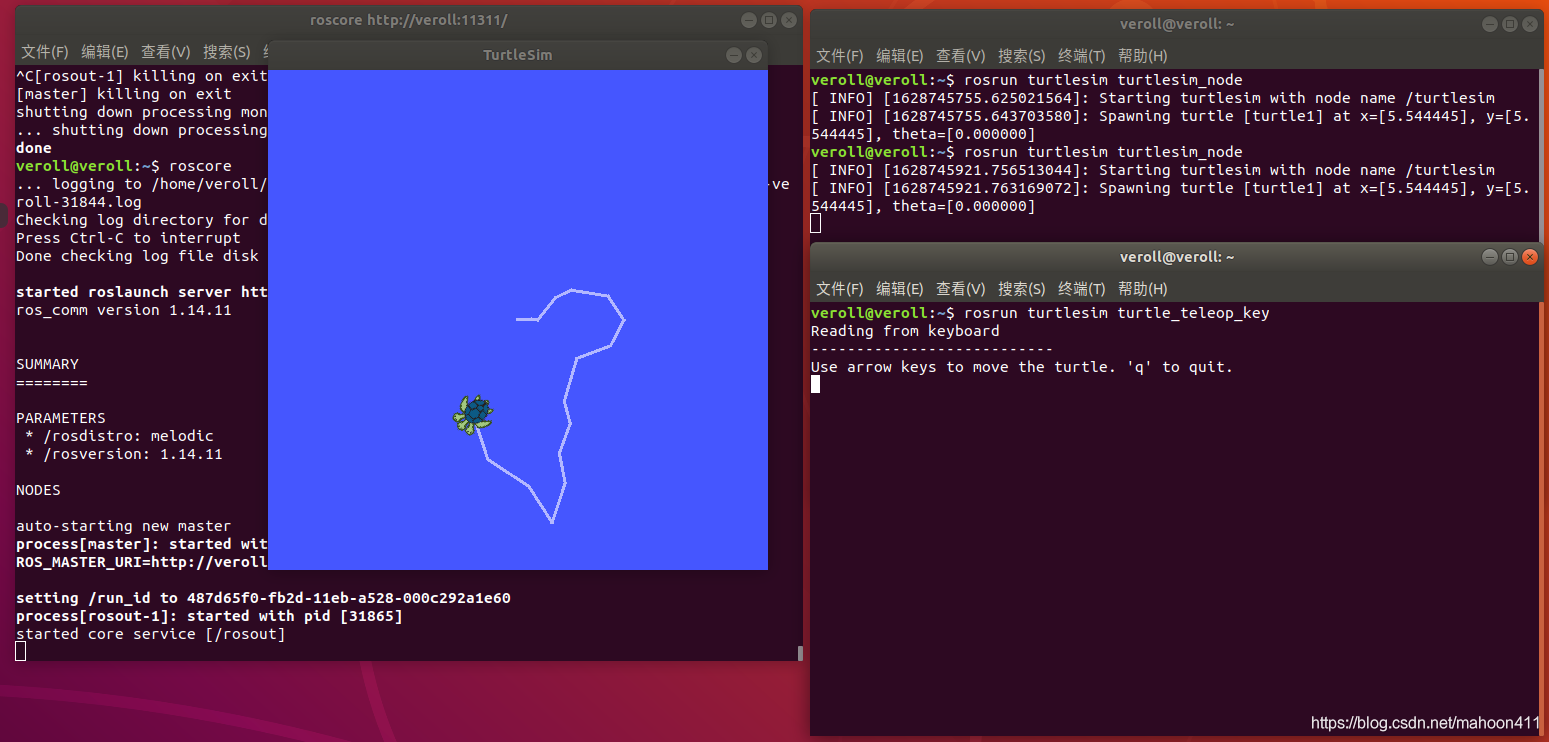
如果上述命令都可以运行,证明ROS已经安装成功啦。
















 1011
1011











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











