








牛顿法的优点是具有二阶收敛速度,缺点是:
- 但当海森矩阵G(xk)=∇2f(x)G(xk)=∇2f(x) 不正定时,不能保证所产生的方向是目标函数在xkxk处的下降方向。
- 特别地,当G(xk)G(xk)奇异时,算法就无法继续进行下去。尽管修正牛顿法可以克服这一缺陷,但修正参数的取值很难把握,过大或过小都会影响到收敛速度。
- 牛顿法的每一步迭代都需要目标函数的海森矩阵G(xk)G(xk),对于大规模问题其计算量是惊人的。
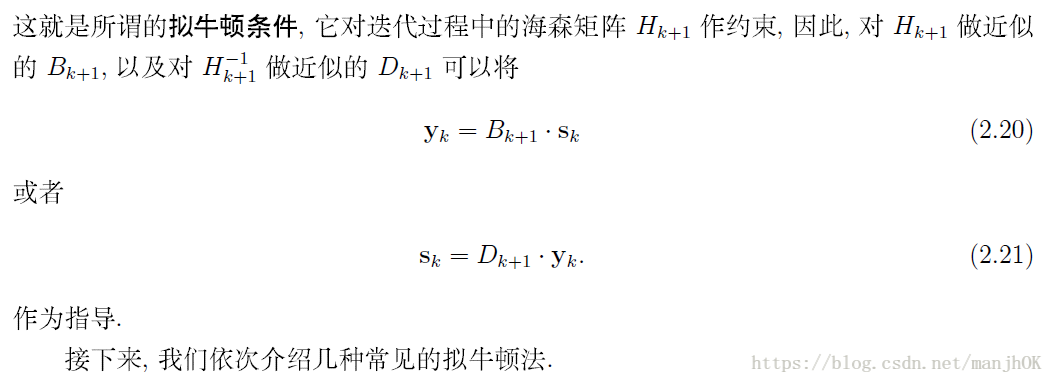
拟牛顿法的基本思想是用海森矩阵GkGk的某个近似矩阵BkBk取代GkGk. BkBk通常具有下面三个特点:
- 在某种意义下有Bk≈GkBk≈Gk ,使得相应的算法产生的方向近似于牛顿方向,确保算法具有较快的收敛速度。
- 对所有的kk,BkBk是正定的,从而使得算法所产生的方向是函数ff在xkxk处下降方向。
- 矩阵BkBk更新规则比较简单
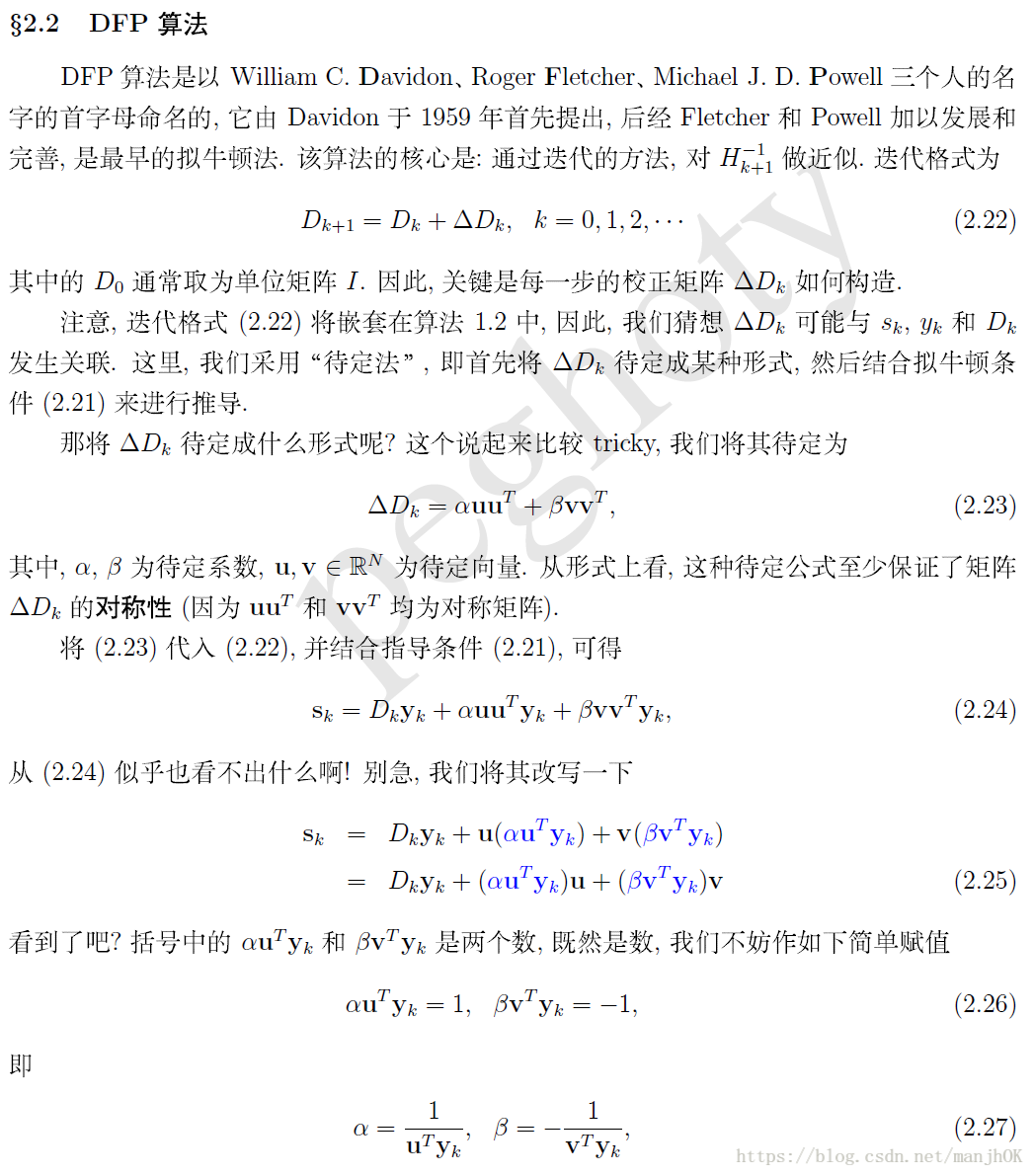
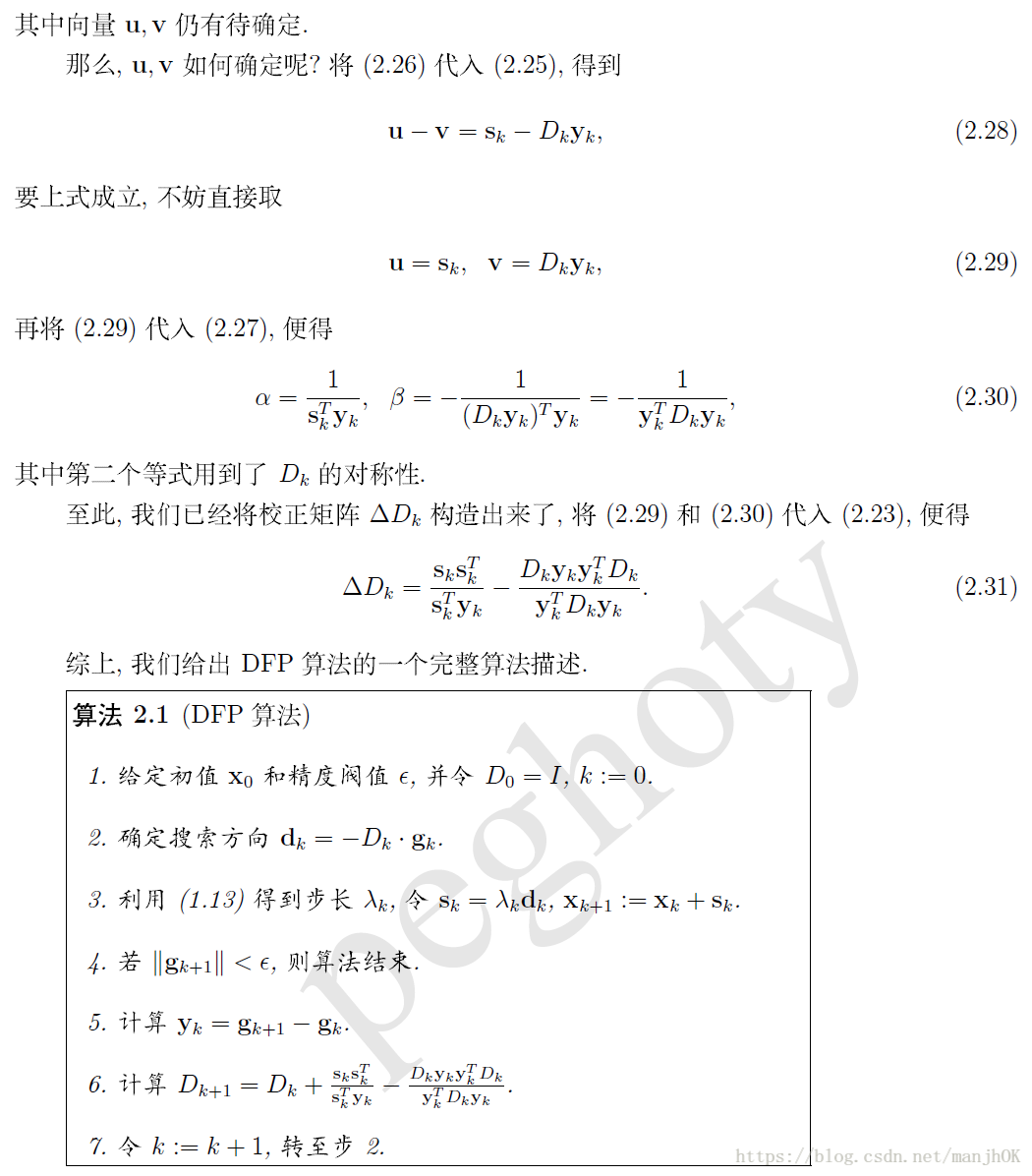
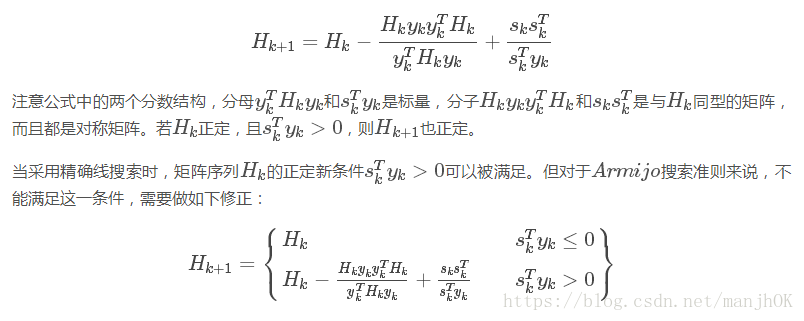
DFP算法的校正公式如下:
DFP算法描述:

DFP算法的代码实现
######################## 拟牛顿_DFP算法#######################
#算法描述:
'''
已知DFP算法的校正公式,注意公式中的两个分数结构,分母((yk)T)Hkyk和((sk)T)yk是标量,
分子Hkyk((yk)T)Hk和sk(sk)T是与Hk同型的矩阵,而且都是对称矩阵。若Hk正定,且((sk)T)yk>0
则Hk+1也正定。
当采用精确线搜索时,矩阵序列Hk的正定新条件((sk)T)yk>0可以被满足。
但对于ArmijoArmijo搜索准则来说,不能满足这一条件,需要做修正
'''
#step 1: 给定参数δ∈(0,1),σ∈(0,0.5),初始点x0∈R,终止误差0≤ϵ≪1.
#初始对称正定矩阵H0(通常取为G(x0)^−1或单位矩阵I).令k←0
#step 2: 计算gk=∇f(xk). 若||gk||≤ϵ,停止迭代,输出x∗≈xk
#step 3: 计算搜索方向
# dk=−Hkgk,其中的Hk表示海森近似矩阵的逆矩阵
#step 4: 记mk是满足下列不等式的最小非负整数m.
#f(xk+β^mdk)≤f(xk)+δ*β^m*(gk)T*dk,为方便起见*代表点乘
#step 5: 由校正公式确定Hk+1
#step 6: k←k+1,转 step 2
def dfp(fun,gfun,hess,x0):
#功能:用DFP族算法求解无约束问题:min fun(x)
#输入:x0是初始点,fun,gfun分别是目标函数和梯度
#输出:x,val分别是近似最优点和最优解,k是迭代次数
maxk = 1e5#最大迭代次数
rho = 0.55#非线性搜索中的B因子
sigma = 0.4#非线性搜索中δ的因子
epsilon = 1e-5
k = 0#初始化迭代次数
n = np.shape(x0)[0]#用于初始化海森单位矩阵和校正部分
#海森矩阵可以初始化为单位矩阵
Hk = np.linalg.inv(hess(x0)) #输入x0的海森逆矩阵,或者单位矩阵np.eye(n)
#Hk =np.linalg.inv(np.eye(n))
while k < maxk :
gk = gfun(x0)#计算得到梯度
if np.linalg.norm(gk) < epsilon:
break
dk = -1.0*np.dot(Hk,gk)#计算得到步向
m=0;#初始化搜索步长次数
mk=0#用于返回搜索步长最小非负整数m
while m < 20: # 用Armijo搜索求步长
if fun(x0+rho**m*dk) < fun(x0)+sigma*rho**m*np.dot(gk,dk):
mk = m
break
m += 1
#DFP校正
x = x0 + rho**mk*dk#更新x的值
sk = x - x0#计算更新x后的sk
yk = gfun(x) - gk#计算更新x后的yk
if np.dot(sk,yk) > 0:#均为一维则内积运算
Hy = np.dot(Hk,yk)#其中的一组Hy[ 0.3826141 15.30415407]
sy = np.dot(sk,yk) #向量的点积
yHy = np.dot(np.dot(yk,Hk),yk) # yHy是标量
#表达式Hy.reshape((n,1))*Hy 中Hy是向量,生成矩阵
Hk = Hk - 1.0*Hy.reshape((n,1))*Hy/yHy + 1.0*sk.reshape((n,1))*sk/sy
k += 1
x0 = x
return x0,fun(x0),k#分别是最优点坐标,最优值,迭代次数
print(dfp(fun,gfun,hess,[20,10]))#采用Hess(x0)的逆迭代次数更小
#(array([1., 1.]), 2.1683502509487778e-18, 104)
#print(dfp(fun,gfun,hess,[5,6]))#采用np.eye(n)的逆迭代次数更大,不一定收敛
#(array([1.02087426, 1.04176415]), 0.0004533843736217651, 100000)
#采用单位矩阵来初始化海森矩阵的逆,迭代次数明显增大













 1310
1310











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









