






录
前言
目前,2D的物体检测算法已经非常成熟,算法准确率的上升空间已经遇到瓶颈,而且2D物体检测多受光照、遮挡等外界环境因素影响,已经满足不了时下复杂环境要求。人们开始转向对3D物体世界的研究,3D物体检测掀起了前所未有的浪潮。本文pointnet网络可以说是3D物体检测领域中里程碑性的工作,它也为后续复杂网络奠定了基础,是3D物体检测领域不可不学,不可不复现的经典网络。
一.资料下载
1.代码下载
代码放在百度网盘了,可在如下链接中下载:
下载完代码如下:
2.数据集下载
如点开网页出现信息如下图:

可点击图片上的 高级 选项 ,然后继续进行下载,如下图黑框中:

二.环境配置
1.本文采用设备配置说明
系统:Ubuntu 18.04.6 LTS(window系统也可)
显卡:RTX3090
CUDA版本:cuda11.1
2.虚拟环境配置
在anconda中创建python3.6版本的虚拟环境,激活虚拟环境并在其中下载torch:
torch1.8.0+cu111
torchvision0.9.0+cu111
以上环境配置出现问题可以查看我上一篇环境配置部分,根据自己电脑配置,配置相对应的cuda及torch版本
三.训练部分
1.分类训练部分
(1)在配置好的虚拟环境中执行:
python train_classification.py --dataset shapenetcore_partanno_segmentation_benchmark_v0--dataset 是指定需要训练的数据集
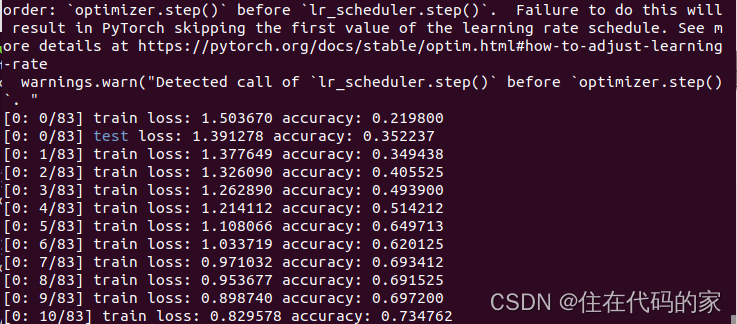
(2)训练过程如下图:
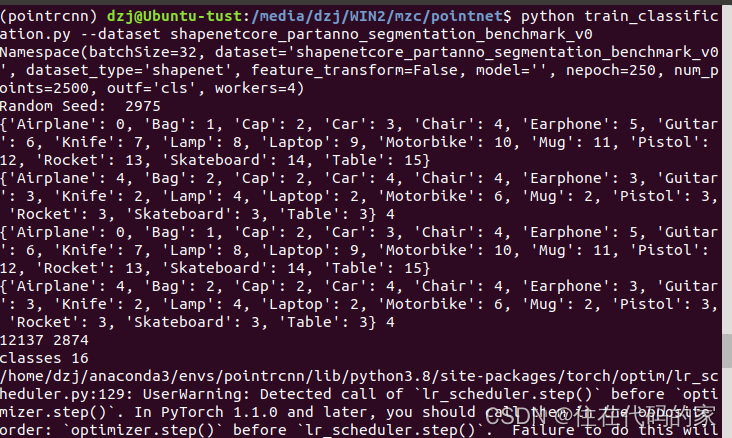
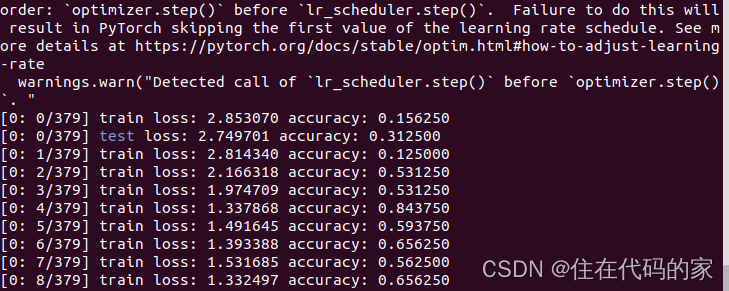
训练完的权重文件会存放在cls文件夹中
2.分割的训练部分
(1)在配置好的虚拟环境中执行:
python train_segmentation.py --dataset shapenetcore_partanno_segmentation_benchmark_v0
--dataset 是指定需要训练的数据集
(2)训练过程如下图:
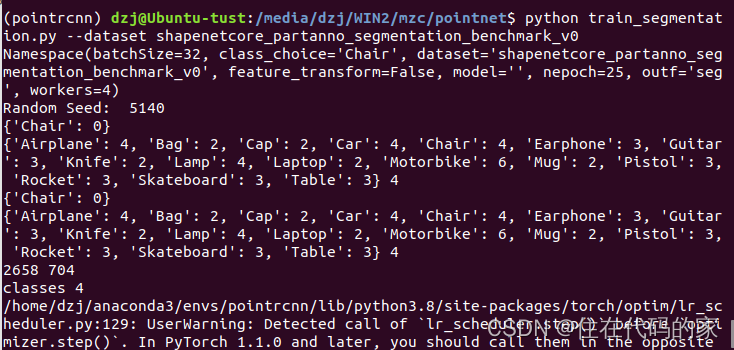
训练完的权重文件会存放在seg文件夹中
四.预测部分
1.分类结果展示
输入以下代码进行预测:
python show_cls.py --model ./cls/cls_model_4.pth
--model 指定得是训练好的权重文件,结果如下:
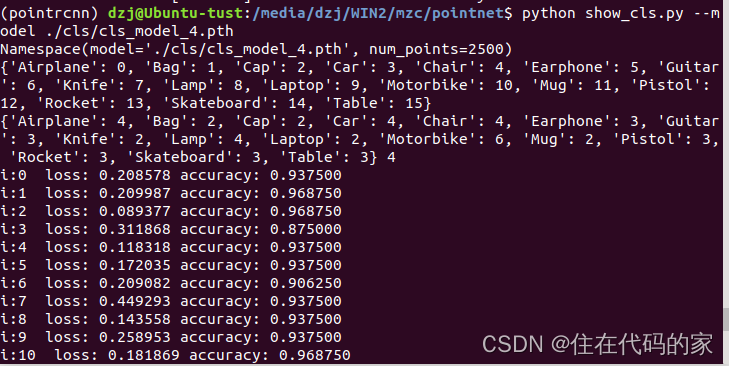
可见,准确率大多都在93%以上,检测效果良好
2.分割结果可视化
输入以下代码进行预测:
python show_seg.py --class_choice 'Car' --model ./seg/seg_model_Chair_4.pth
--class_choice 指定要识别的物体类别
--model 指定得是训练好的权重文件,结果如下:
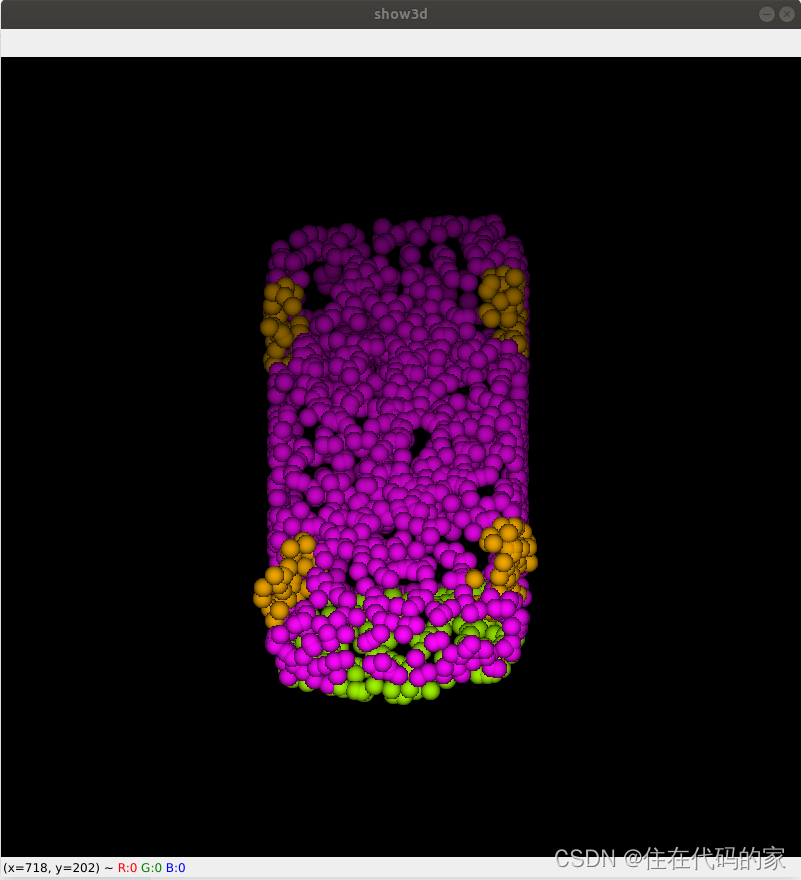
可见,网络已经成功分割出了汽车,这是由3d点云组成的动态汽车图,可滑动鼠标进行查看
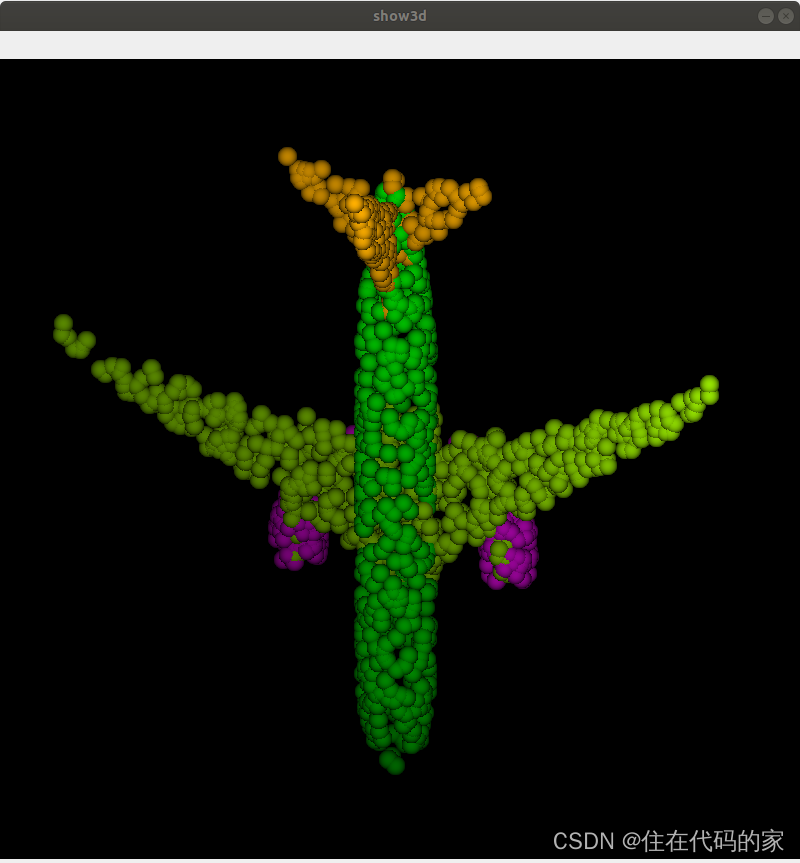
还可以分割飞机等其他物体,操作方法是一样的,只需换一下指定的物体类别,如:
python show_seg.py --class_choice 'Airplane' --model ./seg/seg_model_Chair_4.pth
可视化结果如下:
配置过程中遇到任何问题,可以加关注私聊我,很愿意帮你解决!!!














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









