






【MARS TALK】是由深圳市美团机器人研究院(Meituan Academy of Robotics Shenzhen,简称MARS)发起的系列活动。每一期活动我们将邀请来自美团以及学术界和产业界的专家分享他们在前沿领域的实践经验,共同探讨机器人技术在学术研究和行业应用中的最新发展及热点问题。

活动时间:5月30日(周四) 14:00 - 17:30
活动地点:清华大学深圳国际研究生院信息大楼501会议室(请提前关注「深圳大学城管理服务中心」公众号,在消息页下方进行「入城登记」并填写相关信息。)
活动报名:戳我报名 (或点击文末「阅读原文」进行报名)
活动简介
本次活动将深入探讨电子皮肤在智能机器人领域的创新应用,特别是如何通过多模态传感器和多光谱视触融合感知架构,突破触觉感知的技术障碍,实现对物体的复杂特征识别和灵巧抓握。同时,我们也将分享无人机在城市复杂环境下全天候定位的前沿技术和成果,以及面临的挑战和未来发展方向。本次活动是对机器人技术和无人机定位系统未来潜力的一次深刻剖析,旨在为参与者提供一个探索具身智能、人形机器人和无人机技术最新进展的平台。
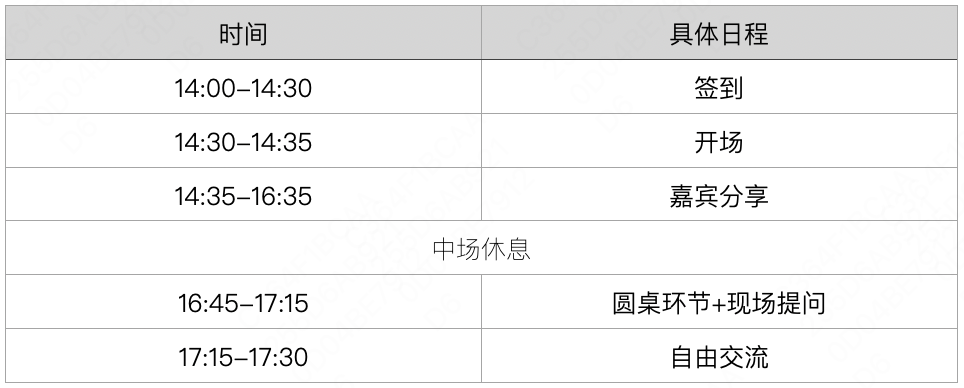
日程安排
分享主题

丁文伯 / 清华大学深圳国际研究生院,副教授、博士生导师、国家青年特聘专家、发展规划办公室主任
分别于2011年和2016年在清华大学电子工程系获得学士和博士学位(导师:宋健教授),2016年至2019年在美国佐治亚理工学院材料科学与工程系从事博士后研究(合作导师:王中林院士)。主要研究领域为机器人感知及智能人机交互系统。曾获2019年和2022年中国电子学会自然科学二等奖;第47届日内瓦国际发明展金奖;2015年中国光学工程学会创新技术奖二等奖;2015年度IEEE Scott Helt Memorial Award(1/5);2015年清华大学特等奖学金等荣誉。担任信号处理期刊DSP副编辑、IEEE JSTSP机器人特刊首席客座编辑。
分享议题:《视觉与触觉的交融:用于物体识别和抓取的灵活触觉感知技术》
分享大纲:
具有触觉感知功能的电子皮肤使得智能机器人能够进行灵巧的操作并与人类和周围环境进行自然交互。然而,由于信号解耦的瓶颈,使用单一触觉传感机制同时感知几何特征和材料属性仍然是一个挑战。本次分享将介绍团队在基于柔性电子皮肤的多模态传感器研制以及多光谱视触融合感知架构方面的工作,并探讨触觉传感在具身智能、人形机器人等领域的技术难题和应用前景。

段老师 / 美团无人机算法工程师
清华大学工学博士,现主要负责无人机无线通信/定位方面的研究。
分享议题:《无人机全天时近场定位技术》
分享大纲:
受限于城市峡谷效应和复杂光照环境下的低可靠性,单纯依靠GNSS定位和VPS定位无法满足无人机全天时运营需求。本次将分享团队在无人机近场全天时定位方面的技术探索,包括已有的技术探索成果和面临的实际挑战,并对其他前沿技术进行展望。
深圳美团机器人研究院
深圳市美团机器人研究院(Meituan Academy of Robotics Shenzhen,MARS)于2022年7月正式挂牌,于2022年11月正式对外宣布成立。研究院将依托美团生活服务丰富的业务场景与数据积累,结合国内外学术界与产业界的科研优势,开展面向机器人领域的关键技术的研发,引领机器人学科前沿和技术创新方向,加快科研成果的落地转化,推动机器人相关技术的示范应用,在大湾区打造机器人技术「产学研用」全方位结合的开放协同创新平台。
机器人技术的发展、落地和应用需要长期投入、持续探索,我们诚挚邀请各界人士在美团机器人研究院这一平台上展开深入的交流和合作,一起推动机器人技术的进步与发展,帮助大家生活更好!欢迎老师和同学们发送邮件至:mars.oi@meituan.com。


















 1367
1367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









