







目录
一 android GPS框架
二 mtk平台的GPS软件分析
三 GPS协议含义
四 GPS协议中看问题(待更新)
一 android GPS框架
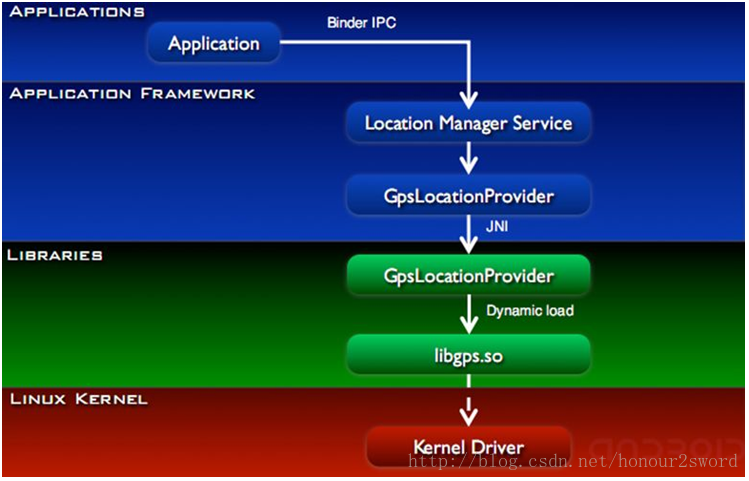
From google
二 mtk平台的GPS软件分析
2.1 代码分布
代码分布自上而下:(android4.2+ 72、89平台)
| 应用层:YGPS | trunk\mediatek\packages\apps\YGPS-----YGPS.apk trunk\mediatek\packages\apps\YGPS\test---工模apk
|
|
| JNI层 | \trunk\frameworks\base\services\jni\ com_android_server_location_GpsLocationProvider.cpp | JNI层只有一个文件,起到承上启下的作用。上层承接Framework,下层调用HAL层具体硬件抽象实现。 |
| service层 | \trunk\frameworks\base\services\java\com\ android\server\LocationManagerService.java | 是Location服务对内部实现的一种封装。 |
| hal层 | \trunk\mediatek\hardware\gps\Gps_mtk.c 生成gps.default.so | HAL层相当于一个linux应用程序接口,通过open,close等操作,操作硬件设备。Android的源代码只实现了模拟器的gps接口,具体在文件gps_qemu.c中 作用:解析mnlp通过socket上传的协议包,变成应用程序识别的数据包。 |
| Gps mnlp deamo | \trunk\mediatek\external\mnl\ 生成libmnlp_mt6628,libmnlp_mt6620, libmnlp_mt6572等应用
\trunk\mediatek\external\mnl\libmnlp\ mnl6572\lib\libagent_6572.a GPS agent库 | 处理socket数据; GPS芯片数据打包和分发; 处理GPS的nvram数据等等; 当使用UART或GPIO通信的时候,初始化UART or GPIO; 协议解析: 01-01 02:11:22.799 4419 4423 D NVRAM : $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 01-01 02:11:22.799 4419 4423 D NVRAM : $GPGSV,3,1,12,06,68,179,,16,63,330,,03,48,206,,23,42,301,*73 01-01 02:11:22.799 4419 4423 D NVRAM : $GPGSV,3,2,12,31,41,097,,19,23,199,,13,20,319,,21,15,083,*7D 01-01 02:11:22.799 4419 4423 D NVRAM : $GPGSV,3,3,12,193,12,156,,32,08,225,,20,04,250,,29,01,036,*42 01-01 02:11:22.799 4419 4423 D NVRAM : $GPRMC,052840.094,V,3112.4342,N,12135.0796,E,0.000,0.00,130613,,,N*4A 01-01 02:11:22.799 4419 4423 D NVRAM : $GPVTG,0.00,T,,M,0.000,N,0.000,K,N*32
|
| meta用的库和应用 | trunk\mediatek\platform\mt6572\external \meta\gps生成 libmeta_gps.a和meta_gps_test可执行文件 | 连接mtk平台的meta工具时候用到. |
| 内核层 | \trunk\mediatek\kernel\drivers\ gps生成 gpsdrv(sysclass接口)和mt3326-gps设备文件 | 提供IO control和platform driver,注册字符设备驱动: GPS注册成一个字符设备,mtk通过/dev/stpgps(目前不通过UART:/dev/ttyMT1)通信,不走linux内核的net device设备流程(与bt wifi不同,bt wifi需要走net device流程) |
| mt66xx系列的stp模块驱动 | \trunk\mediatek\kernel\drivers\combo\ common\linux\pub\stp_chrdev_gps.c 生成stp_chrdev_gps.ko \trunk\mediatek\kernel\drivers\ combo\common\makefile: obj-$(CONFIG_MTK_COMBO_GPS) += mtk_stp_gps$(EXT_FLAG).o mtk_stp_gps$(EXT_FLAG)-objs := linux/pub/stp_chrdev_gps.o
| stp模块,对实现最终对GPS芯片的数据读写。 |
| 与modem通信模块驱动 | \trunk\mediatek\external\BGW \BGW_CCCI.c 生成BGW应用在 /system/xbin/BGW | 与modem通信模块驱动,GPS卫星信号调制处理部分; |
三 GPS协议含义(引用自网络)
GPS数据格式(NMEA-0183协议)
GPS上电后,每隔一定的时间就会返回一定格式的数据,数据格式为:
$信息类型,x,x,x,x,x,x,x,x,x,x,x,x,x
每行开头的字符都是‘$’,接着是信息类型,后面是数据,以逗号分隔开。一行完整的数据如下:
$GPRMC,080655.00,A,4546.40891,N,12639.65641,E,1.045,328.42,170809,,,A*60
信息类型为:
GPGSV:可见卫星信息
GPGLL:地理定位信息
GPRMC:推荐最小定位信息
GPVTG:地面速度信息
GPGGA:GPS定位信息
GPGSA:当前卫星信息
1、 GPS DOP and Active Satellites(GSA)当前卫星信息
$GPGSA,<1>,<2>,<3>,<3>,,,,,<3>,<3>,<3>,<4>,<5>,<6>,<7><CR><LF>
<1>模式 :M =手动, A = 自动。
<2>定位型式 1 =未定位, 2 = 二维定位, 3 = 三维定位。
<3>PRN 数字:01 至 32 表天空使用中的卫星编号,最多可接收12颗卫星信息。
<4> PDOP位置精度因子(0.5~99.9)
<5> HDOP水平精度因子(0.5~99.9)
<6> VDOP垂直精度因子(0.5~99.9)
<7> Checksum.(检查位).
2、 GPS Satellites in View(GSV)可见卫星信息
$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><CR><LF>
<1> GSV语句的总数
<2> 本句GSV的编号
<3> 可见卫星的总数,00 至 12。
<4> 卫星编号, 01 至 32。
<5>卫星仰角, 00至 90 度。
<6>卫星方位角, 000至 359 度。实际值。
<7>讯号噪声比(C/No), 00 至 99 dB;无表未接收到讯号。
<8>Checksum.(检查位).
第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。其余卫星信息会于次一行出现,若未使用,这些字段会空白。
3、Global Positioning System Fix Data(GGA)GPS定位信息
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF>
<1> UTC时间,hhmmss(时分秒)格式
<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<3> 纬度半球N(北半球)或S(南半球)
<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<5> 经度半球E(东经)或W(西经)
<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算
<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)
<8> HDOP水平精度因子(0.5~99.9)
<9> 海拔高度(-9999.9~99999.9)
<10> 地球椭球面相对大地水准面的高度
<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)
<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)
4、Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐定位信息
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF>
<1> UTC时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<4> 纬度半球N(北半球)或S(南半球)
<5> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<6> 经度半球E(东经)或W(西经)
<7> 地面速率(000.0~999.9节,前面的0也将被传输)
<8> 地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC日期,ddmmyy(日月年)格式
<10> 磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
5、 Track Made Good and Ground Speed(VTG)地面速度信息
$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh<CR><LF>
<1> 以真北为参考基准的地面航向(000~359度,前面的0也将被传输)
<2> 以磁北为参考基准的地面航向(000~359度,前面的0也将被传输)
<3> 地面速率(000.0~999.9节,前面的0也将被传输)
<4> 地面速率(0000.0~1851.8公里/小时,前面的0也将被传输)
<5> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
$GPRMC,034457.7,A,3640.304491,N,11707.680147,E,3.1,181.1,191209,,,A*67
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF>
<1> UTC时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<4> 纬度半球N(北半球)或S(南半球)
<5> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<6> 经度半球E(东经)或W(西经)
<7> 地面速率(000.0~999.9节,前面的0也将被传输)
<8> 地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC日期,ddmmyy(日月年)格式
<10> 磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
034457.7
A A=有效定位,V=无效定位
3640.304491 纬度 36.40304491
N 纬度半球N(北半球)或S(南半球)
11707.680147 经度 117.07680147
E 经度半球E(东经)或W(西经)
3.1 速率 3.1 km/h
181.1 地面航向 181.1度 以真北为参考基准
191209 19/12/2009 UTC日期 2009-12-19
\
\
A*67 A=自主定位,D=差分,E=估算,N=数据无效
===============================================
$GPRMC
格式为:
$GPRMC,010101.130, A, 3606.6834, N, 12021.7778, E, 0.0, 238.3, 010807,,,A*6C
$GPRMC, <1>, <2>, <3>, <4>, <5>, <6>, <7>, <8>, <9>,
$ pos=0
<1> 当前位置的格林尼治时间,即世界时间,与北京时间差8个小时,格式为hhmmss.ms [pos+6]
<2> 状态, A 为有效位置, V为非有效接收警告,即当前天线视野上方的卫星个数少于3颗。 [pos+17]
注意几点:
1、当GPS数据有效时第17位(一般情况下,程序里最好是找第二个逗号在取下一位判断)为“A”,无效时为“V”;
2、GPS有效时,当速度为0时显示0.0(两位数),当速度不为0时小数点前面数据根据情况变化,最大为三位,此处速度单位为节(海里),需要做处理才能得到我们习惯的单位(公里/小时);
3、GPS无效时,除了第17位显示V以外,不输入速度,角度数据;
4、当给GPS复位时第17位为V,不输出速度,角度,时间数据。
d.推荐定位信息(RMC)//项目需要
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh
<1> UTC时间,hhmmss(时分秒)格式 //好像还有毫秒。
<2> 定位状态,A=有效定位,V=无效定位
<3> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
<4> 纬度半球N(北半球)或S(南半球)
<5> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)
<6> 经度半球E(东经)或W(西经)
<7> 地面速率(000.0~999.9节,前面的0也将被传输)
<8> 地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC日期,ddmmyy(日月年)格式
<10> 磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
GPS固定数据输出语句($GPGGA)
这是一帧GPS定位的主要数据,也是使用最广的数据。
$GPGGA 语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,水平精确度,海拔高度,高度单位,大地水准面高度,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符<CR>和换行符<LF>),分别用14个逗号进行分隔。该数据帧的结构及各字段释义如下:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx<CR><LF>
$GPGGA:起始引导符及语句格式说明(本句为GPS定位数据);
<1> UTC时间,格式为hhmmss.sss;
<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);
<3> 纬度半球,N或S(北纬或南纬)
<4> 经度,格式为dddmm.mmmm(第一位零也将传送);
<5> 经度半球,E或W(东经或西经)
<6> 定位质量指示,0=定位无效,1=定位有效;
<7> 使用卫星数量,从00到12(第一个零也将传送)
<8> 水平精确度,0.5到99.9
<9> 天线离海平面的高度,-9999.9到9999.9米
M 指单位米
<10> 大地水准面高度,-9999.9到9999.9米
M 指单位米
<11> 差分GPS数据期限(RTCM SC-104),最后设立RTCM传送的秒数量
<12> 差分参考基站标号,从0000到1023(首位0也将传送)。
* 语句结束标志符
xx 从$开始到*之间的所有ASCII码的异或校验和
<CR> 回车
<LF> 换行
b.可视卫星状态输出语句($GPGSV)
例2:$GPGSV,2,1,08,06,33,240,45,10,36,074,47,16,21,078,44,17,36,313,42*78
标准格式:$GPGSV,(1),(2),(3),(4),(5),(6),(7),…(4),(5),(6),(7)*hh(CR)(LF)
各部分含义为:
(1)总的GSV语句电文数;2;
(2)当前GSV语句号:1;
(3)可视卫星总数:08;
(4)卫星号:06;
(5)仰角(00~90度):33度;
(6)方位角(000~359度):240度;
(7)信噪比(00~99dB):45dB(后面依次为第10,16,17号卫星的信息);
*总和校验域;
hh 总和校验数:78;
(CR)(LF)回车,换行。
注:每条语句最多包括四颗卫星的信息,每颗卫星的信息有四个数据项,即:
(4)-卫星号,(5)-仰角,(6)-方位角,(7)-信噪比。
c.当前卫星信息($GSA)
$GPGSA,<1>,<2>,<3>,<3>,,,,,<3>,<3>,<3>,<4>,<5>,<6>,<7>
<1>模式 :M =手动, A = 自动。
<2>定位型式 1 = 未定位, 2 =二维定位, 3 = 三维定位。
<3>PRN 数字:01 至 32 表天空使用中的卫星编号,最多可接收12颗卫星信息。
<4> PDOP位置精度因子(0.5~99.9)
<5> HDOP水平精度因子(0.5~99.9)
<6> VDOP垂直精度因子(0.5~99.9)
<7> Checksum.(检查位).
e.地面速度信息(VTG)
$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh
<1> 以真北为参考基准的地面航向(000~359度,前面的0也将被传输)
<2> 以磁北为参考基准的地面航向(000~359度,前面的0也将被传输)
<3> 地面速率(000.0~999.9节,前面的0也将被传输)
<4> 地面速率(0000.0~1851.8公里/小时,前面的0也将被传输)
<5> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效














 2768
2768











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









