










Description
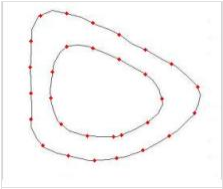
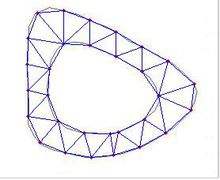
随机生成上下两个三角网,由两个三角网的边界生成侧面三角网,组合成封闭的三角网。
Code
#include <vtkSmartPointer.h>
#include <vtkPoints.h>
#include <vtkPolyData.h>
#include <vtkCellArray.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkProperty.h>
#include <vtkNamedColors.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkDelaunay2D.h>
#include <vtkFeatureEdges.h>
#include <vtkStripper.h>
#include <vtkCleanPolyData.h>
#include <vtkAppendPolyData.h>
#include <vtkVertexGlyphFilter.h>
int main(int, char *[])
{
/*
* 模拟生成第一个三角网
* 1. 随机生成点集
* 2. 获取生成三角网的边界环点集(有序)
*/
vtkSmartPointer<vtkPoints> ps1 =vtkSmartPointer<vtkPoints>::New();
unsigned int GridSize = 10;
for(unsigned int x = 0; x < GridSize; x++)
{
for(unsigned int y = 0; y < GridSize; y++)
{
ps1->InsertNextPoint(x, y, vtkMath::Random(-.25, .25));
}
}
vtkSmartPointer<vtkPolyData> polydata1 =vtkSmartPointer<vtkPolyData>::New();
polydata1->SetPoints(ps1);
vtkSmartPointer<vtkDelaunay2D> delaunay1 =vtkSmartPointer<vtkDelaunay2D>::New();
delaunay1->SetInputData(polydata1);
delaunay1->Update();
//获取三角网边界点集
vtkSmartPointer<vtkFeatureEdges> featureEdges1 =vtkSmartPointer<vtkFeatureEdges>::New();
featureEdges1->SetInputConnection(delaunay1->GetOutputPort());
featureEdges1->BoundaryEdgesOn();
featureEdges1->FeatureEdgesOff();
featureEdges1->ManifoldEdgesOff();
featureEdges1->NonManifoldEdgesOff();
featureEdges1->Update();
//使点集有序
vtkSmartPointer<vtkStripper> stripper1 =vtkSmartPointer<vtkStripper>::New();
stripper1->SetInputConnection(featureEdges1->GetOutputPort());
vtkSmartPointer<vtkCleanPolyData> cleanPolyData1 =
vtkSmartPointer<vtkCleanPolyData>::New();
cleanPolyData1->SetInputConnection(stripper1->GetOutputPort());
cleanPolyData1->Update();
vtkPoints *pt = nullptr;
double* p;
unsigned int num1, num2;
pt = cleanPolyData1->GetOutput()->GetPoints();
num1 = pt->GetNumberOfPoints();
//拷贝到边界点集中
vtkSmartPointer<vtkPoints> boundary1 = vtkSmartPointer<vtkPoints>::New();
//boundary1->SetNumberOfPoints(num1);
// boundary1->DeepCopy(pt);
//DeepCopy 拷贝节点会无序
for (unsigned int i = 0; i < num1; ++i) {
p = pt->GetPoint(i);
boundary1->InsertNextPoint(p);
}
/*
* 模拟生成第一个三角网
* 1. 随机生成点集
* 2. 获取生成三角网的边界环点集(有序)
*/
vtkSmartPointer<vtkPoints> pts2 = vtkSmartPointer<vtkPoints>::New();
GridSize = 9;
for (unsigned int x =1; x < GridSize; x++)
{
for (unsigned int y =1; y < GridSize; y++)
{
pts2->InsertNextPoint(x+ vtkMath::Random(-.25, 1.25), y+ vtkMath::Random(-.25, 1.25), vtkMath::Random(1.5, 1.75));
}
}
vtkSmartPointer<vtkPolyData> polydata2 = vtkSmartPointer<vtkPolyData>::New();
polydata2->SetPoints(pts2);
vtkSmartPointer<vtkDelaunay2D> delaunay2 = vtkSmartPointer<vtkDelaunay2D>::New();
delaunay2->SetInputData(polydata2);
delaunay2->Update();
vtkSmartPointer<vtkFeatureEdges> featureEdges2 =vtkSmartPointer<vtkFeatureEdges>::New();
featureEdges2->SetInputConnection(delaunay2->GetOutputPort());
featureEdges2->BoundaryEdgesOn();
featureEdges2->FeatureEdgesOff();
featureEdges2->ManifoldEdgesOff();
featureEdges2->NonManifoldEdgesOff();
featureEdges2->Update();
vtkSmartPointer<vtkStripper> stripper2 =vtkSmartPointer<vtkStripper>::New();
stripper2->SetInputConnection(featureEdges2->GetOutputPort());
vtkSmartPointer<vtkCleanPolyData> cleanPolyData2 =vtkSmartPointer<vtkCleanPolyData>::New();
cleanPolyData2->SetInputConnection(stripper2->GetOutputPort());
cleanPolyData2->Update();
pt = cleanPolyData2->GetOutput()->GetPoints();
num2 = pt->GetNumberOfPoints();
//将第二个边界点集拷贝到边界点集中
vtkSmartPointer<vtkPoints> boundary2 = vtkSmartPointer<vtkPoints>::New();
//boundary2->SetNumberOfPoints(num2);
//boundary2->DeepCopy(pt);
for (unsigned int i = 0; i < num1; ++i) {
p = pt->GetPoint(i);
boundary2->InsertNextPoint(p);
}
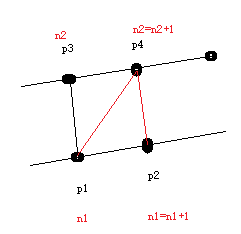
/*
* 由上下两个边界环生成三角网
* 原则:按照最短对角线原则
* 方法:上下两个边界环,依次组成四边形,比较对角线的大小,生成三角形
*/
vtkPoints *boundary = vtkPoints::New();
for (unsigned int i = 0; i < num1; ++i) {
p = boundary1->GetPoint(i);
boundary->InsertNextPoint(p);
}
for (unsigned int i = 0; i < num2; ++i) {
p = boundary2->GetPoint(i);
boundary->InsertNextPoint(p);
}
vtkIdType pts[3]; //保存三角形三个顶点的索引
vtkPolyData* meshPloyData = vtkPolyData::New();
vtkCellArray* triangles = vtkCellArray::New();
triangles->Allocate(triangles->EstimateSize(2 * (num1+num2), 3));
meshPloyData->SetPoints(boundary);
meshPloyData->SetPolys(triangles);
double d0 = 0.0,d1=0.0; //保存四边形两条对角线的长度
double p1[3],p2[3],p3[3],p4[3]; //四边形的四个顶点
unsigned int n1=0, n2=0; //上下边界环当前遍历的位置
unsigned int start1=0, start2=0;//上下边界环遍历的起始位置
start1 = 0;// 设置第一条边界环遍历的起始位置 start1=0
boundary1->GetPoint(0, p1);
//寻找第二条边的起始位置 start2 (距离最近的点)
d1 = VTK_DOUBLE_MAX;
for (unsigned int i = 0; i < num2; ++i) {
boundary2->GetPoint(i, p2);
d0= vtkMath::Distance2BetweenPoints(p1, p2);
if (d0 < d1) {
d1 = d0;
start2 = i;
}
}
n2 = start2;
bool flag = false;
do {
// 组成四边形的四个点
// p1,p2 一条边界环的点
// p3,p4 另一条边界环的点
boundary1->GetPoint(n1, p1);
boundary1->GetPoint((n1+1)%num1, p2);
boundary2->GetPoint(n2, p3);
boundary2->GetPoint((n2+1)%num2, p4);
d0 = vtkMath::Distance2BetweenPoints(p1, p4);
d1 = vtkMath::Distance2BetweenPoints(p2, p3);
pts[0] = n1%num1;
pts[1] = n2%num2 + num1;
if (d0<=d1) {
pts[2] = (n2 + 1) % num2 + num1;
n2 = (n2 + 1)% num2;
}else{
pts[2] = (n1 + 1) % num1;
n1 = (n1 + 1) % num1;
}
triangles->InsertNextCell(3, pts);
flag = !((n1%num1 == start1||(n1 + 1) % num1 == start1) && (n2%num2 == start2||(n2 + 1) % num2 == start2));
}while (flag);
//最后两个三角形的情况
if ((n1+1)%num1 == start1 && ( n2+1)%num2 == start2) {
boundary1->GetPoint(n1, p1);
boundary1->GetPoint((n1 + 1) % num1, p2);
boundary2->GetPoint(n2, p3);
boundary2->GetPoint((n2 + 1) % num2, p4);
d0 = vtkMath::Distance2BetweenPoints(p1, p4);
d1 = vtkMath::Distance2BetweenPoints(p2, p3);
if (d0 <= d1) {
pts[0] = n1%num1;
pts[1] = n2%num2 + num1;
pts[2] = (n2 + 1) % num2 + num1;
triangles->InsertNextCell(3, pts);
pts[0] = n1%num1;
pts[1] = (n2 + 1) % num2 + num1;
pts[2] = (n1 + 1) % num1;
triangles->InsertNextCell(3, pts);
}
else {
pts[0] = n1%num1;
pts[1] = n2%num2 + num1;
pts[2] = (n1 + 1) % num1;
triangles->InsertNextCell(3, pts);
pts[0] = (n1 + 1) % num1;
pts[1] = (n2 + 1) % num2 + num1;
pts[2] = n2%num2 + num1;
triangles->InsertNextCell(3, pts);
}
}
else { // 最后一个三角形的情况
if (n1 == 0) {
pts[0] = n1%num1;
pts[1] = n2%num2 + num1;
pts[2] = (n2 + 1) % num2 + num1;
}
else {
pts[0] = n1%num1;
pts[1] = n2%num2 + num1;
pts[2] = (n1 + 1) % num1;
}
triangles->InsertNextCell(3, pts);
}
meshPloyData->BuildLinks();
// combine two poly data
// 上下三角网和侧面三角网组合,生成封闭的体
vtkSmartPointer<vtkAppendPolyData> appendFilter =vtkSmartPointer<vtkAppendPolyData>::New();
appendFilter->AddInputData(delaunay1->GetOutput());
appendFilter->AddInputData(delaunay2->GetOutput());
appendFilter->AddInputData(meshPloyData);
appendFilter->Update();
/*vtkSmartPointer<vtkCleanPolyData> cleanPolyData = vtkSmartPointer<vtkCleanPolyData>::New();
cleanPolyData->SetInputConnection(appendFilter->GetOutputPort());
cleanPolyData->Update();*/
// Visualize
vtkSmartPointer<vtkNamedColors> colors =vtkSmartPointer<vtkNamedColors>::New();
vtkSmartPointer<vtkPolyDataMapper> meshMapper =vtkSmartPointer<vtkPolyDataMapper>::New();
meshMapper->SetInputConnection(appendFilter->GetOutputPort());
/*meshMapper->SetInputData(meshPloyData);
meshMapper->Update();*/
vtkSmartPointer<vtkActor> meshActor =vtkSmartPointer<vtkActor>::New();
meshActor->SetMapper(meshMapper);
meshActor->GetProperty()->SetColor(colors->GetColor3d("Banana").GetData());
meshActor->GetProperty()->EdgeVisibilityOn();
vtkSmartPointer<vtkVertexGlyphFilter> glyphFilter =vtkSmartPointer<vtkVertexGlyphFilter>::New();
glyphFilter->SetInputData(appendFilter->GetOutput());
vtkSmartPointer<vtkPolyDataMapper> pointMapper =vtkSmartPointer<vtkPolyDataMapper>::New();
pointMapper->SetInputConnection(glyphFilter->GetOutputPort());
vtkSmartPointer<vtkActor> pointActor =vtkSmartPointer<vtkActor>::New();
pointActor->GetProperty()->SetColor(colors->GetColor3d("Tomato").GetData());
pointActor->GetProperty()->SetPointSize(5);
pointActor->SetMapper(pointMapper);
vtkSmartPointer<vtkRenderer> renderer = vtkSmartPointer<vtkRenderer>::New();
vtkSmartPointer<vtkRenderWindow> renderWindow =vtkSmartPointer<vtkRenderWindow>::New();
renderWindow->AddRenderer(renderer);
vtkSmartPointer<vtkRenderWindowInteractor> renderWindowInteractor =vtkSmartPointer<vtkRenderWindowInteractor>::New();
renderWindowInteractor->SetRenderWindow(renderWindow);
renderer->AddActor(meshActor);
renderer->AddActor(pointActor);
renderer->SetBackground(colors->GetColor3d("Mint").GetData());
renderWindow->Render();
renderWindowInteractor->Start();
return EXIT_SUCCESS;
}
算法示意图














 4924
4924











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









