








我今天一整天都在试着将TQ2440的那种处理中断的方法(即安装中断向量表)移植到MDK中的mini2440,但是一直没成功,这种方法一直没成功,后来又想,还是先从最简单的开始吧,就是不利用中断向量表,直接像利用51单片机那样的中断一样使用它,但是也没成功。考虑到程序跑飞的可能性,将程序利用MDK中的Download功能下载到了Nor Flash中去,竟然行了,想了想原因,明白是怎么回事了。我原来是利用jlink调试的方法,这种调试方式是直接将程序放到了SDRAM的0x3000 0000处,如果发生中断后,比如发生了普通中断IRQ,那么PC指针被强制设为0x0000 0018,而我的程序是放在了0x3000 0000处,在地址0x0000 0018处有什么我也不知道,这样子程序就跑飞了。
下面还是简单说一下我的外部中断实验,结合具体的实验,分析中断的响应过程,以及中断服务函数的编写。
实验功能
本实验实现的功能:mini2440开发板上有6个按键,将其中的前4个按键设为外部中断方式,当按下K1时,LED1亮;当按下K2时,LED2亮;当按下K3时,LED3亮;当按下K4时,LED4亮。
硬件电路分析:
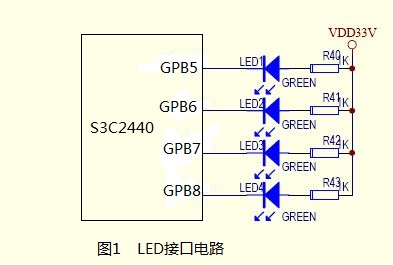
我的256M的mini2440板子上有4个LED,其接口电路如图1所示,当GPIO口输出为低电平时,相对应的LED灯亮;输出高电平时,LED灯灭。
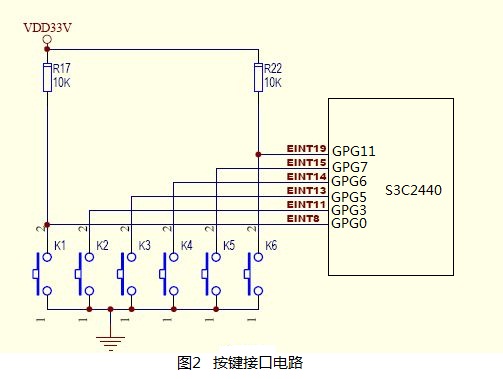
按键接口电路如图2所示,当按键没有按下时,GPGx引脚为高电平;当按键按下时,引脚电平变为低电平。
程序分析:
外部中断工程的文件布局如图3所示。
该工程有三个模块组成:按键模块、LED模块和中断处理模块。按键模块主要包含button.c和button.h文件。LED模块包含led.c和led.h文件。中断处理模块主要包含interrupt.c、interrupt.h、isrservice.c和isrservice.h文件。其中,interrupt.h和interrupt.c文件主要包含中断初始化函数,isrservice.c和isrservice.h文件主要包含中断处理函数。下面我贴出源文件
main.c文件
#include"led.h"
#include"button.h"
#include"isrservice.h"
#include"interrupt.h"
int main()
{
Led_Init(); //初始化LED
KeyInt_Init(); //初始化按键
Irq_Init(); //初始化外部中断
while(1) //循环,等待中断发生
{
;
}
}
led.c文件
/****************************************************
* 我的mini2440开发板上4个LED灯对应的GPIO口
* LED1---GPB5 LED2---GPB6
* LED3---GPB7 LED4---GPB8
*****************************************************/#include<s3c2440.h>
/****************************************************
* 函数名称:void Led_Init(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:设置GPB5-8为输出功能,初始化4个LED灯灭
*****************************************************/
void Led_Init(void)
{
GPBCON&=~((3<<10)|(3<<12)|(3<<14)|(3<<16));
GPBCON|=((1<<10)|(1<<12)|(1<<14)|(1<<16)); //设置GPB5-8口为输出功能
GPBUP&=~((1<<5)|(1<<6)|(1<<7)|(1<<8)); //上拉电阻使能
GPBDAT|=(1<<5)|(1<<6)|(1<<7)|(1<<8); //令GPBDAT5-8均为高电平,即令4个led灯全灭
}
led.h文件
#ifndef __LED_H__
#define __LED_H__#include<s3c2440.h>
#define Led1_On() {GPBDAT&=(~(1<<5));}
#define Led1_Off() {GPBDAT|=(1<<5);}
#define Led2_On() {GPBDAT&=(~(1<<6));}
#define Led2_Off() {GPBDAT|=(1<<6);}
#define Led3_On() {GPBDAT&=(~(1<<7));}
#define Led3_Off() {GPBDAT|=(1<<7);}
#define Led4_On() {GPBDAT&=(~(1<<8));}
#define Led4_Off() {GPBDAT|=(1<<8);}
/****************************************************
* 函数名称:void Led_Init(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:设置GPN5-8为输出功能,初始化4个LED灯灭
*****************************************************/
void Led_Init(void);#endif
button.c文件
/************************************************
* mini2440板子上六个按键对应的GPIO和中断
* 按键 GPIO 中 断
* K1 GPG0 EINT8
* K2 GPG3 EINT11
* K3 GPG5 EINT13
* K4 GPG6 EINT14
* K5 GPG7 EINT15
* K6 GPG11 EINT19
************************************************/#include<s3c2440.h>
#include"button.h"#define KEY1_C (3<<0)
#define KEY2_C (3<<6)
#define KEY3_C (3<<10)
#define KEY4_C (3<<12)#define KEY1 (2<<0)
#define KEY2 (2<<6)
#define KEY3 (2<<10)
#define KEY4 (2<<12)/****************************************************
* 函数名称:void KeyInt_Init()
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:设置GPG0、3、5、6、7、11为外部中断输入功能
*****************************************************/
void KeyInt_Init(void)
{
GPGCON&=~(KEY1_C|KEY2_C|KEY3_C|KEY4_C);
GPGCON|=KEY1|KEY2|KEY3|KEY4; //将GPG0、3、5、6、7、11设为外部中断输入功能
GPGUP&=~((1<<0)|(1<<3)|(1<<5)|(1<<6));
GPGDAT|=(1<<0)|(1<<3)|(1<<5)|(1<<6); //因为按下按键后,相应的GPIO口为0,所以初始化为高电平
}
button.h文件
#ifndef __BUTTON_H__
#define __BUTTON_H__/****************************************************
* 函数名称:void KeyInt_Init()
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:设置GPG0、3、5、6、7、11为外部中断输入功能
*****************************************************/
void KeyInt_Init(void);#endif
interrupt.h文件
#ifndef __INTERRUPT_H__
#define __INTERRUPT_H__
/****************************************************
* 函数名称:void Irq_Init(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:将Led1-4按键对应的中断屏蔽位置设为无效
*****************************************************/
void Irq_Init(void);#endif
interrupt.c文件
/************************************************
* mini2440板子上六个按键对应的GPIO和中断
* 按键 GPIO 中 断
* K1 GPG0 EINT8
* K2 GPG3 EINT11
* K3 GPG5 EINT13
* K4 GPG6 EINT14
* K5 GPG7 EINT15
* K6 GPG11 EINT19
************************************************/#include<s3c2440.h>
#include"interrupt.h"
/****************************************************
* 函数名称:void Irq_Init(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:将Led1-4按键对应的中断屏蔽位置设为无效
*****************************************************/
void Irq_Init(void)
{
//对于EINT8,EINT11,EINT13,EINT14,需要在EINTMASK寄存器使能它们
EINTMASK&=(~(1<<8))&(~(1<<11))&(~(1<<13))&(~(1<<14));
//这4个外部中断的优先级是相同的,EINT8_23都接仲裁器的REQ1引脚
//所以不用像韦东山程序里那样再设置优先级了
//EINT8,EINT11,EINT13,EINT14使能
INTMSK&=(~(1<<5));
}
isrservice.h文件
#ifndef __ISRSERVICE_H__
#define __ISRSERVICE_H__/****************************************************
* 函数名称:void __irq IRQ_Handler(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:中断服务函数,必须加__irq
*****************************************************/
void __irq IRQ_Handler(void);#endif
isrservice.c文件
#include<s3c2440.h>
#include"isrservice.h"
#include"led.h"void delay(void);
/****************************************************
* 函数名称:void __irq IRQ_Handler(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:中断服务函数,必须加__irq
*****************************************************/
void __irq IRQ_Handler(void)
{
unsigned long oft=INTOFFSET;
unsigned long val;
val=EINTPEND; //EINT寄存器,它的位x为1时,表示EINT已经发生(x为4——23)。
if(val&(1<<8)) //K1被按下,LED1被点亮
{
Led1_On();delay();Led1_Off();
}
if(val&(1<<11)) //K2被按下,LED2被点亮
{
Led2_On();delay();Led2_Off();
}
if(val&(1<<13)) //K3被按下,LED3被点亮
{
Led3_On();delay();Led3_Off();
}
if(val&(1<<14)) //K4被按下,LED4被点亮
{
Led4_On();delay();Led4_Off();
}
//清除中断
if(oft==5)
EINTPEND=(1<<8)|(1<<11)|(1<<13)|(1<<14); //清除EINTPEND寄存器,往某位写入1即可清楚此位
SRCPND=1<<oft; //清除SRCPND寄存器,往某位写入1即可清楚此位
INTPND=1<<oft; //清除INTPND寄存器,往某位写入1即可清楚此位
//注意:清除顺序很重要:先是EINTPEND,然后是SRCPND,最后是INTPND
}
/****************************************************
* 函数名称:static void delay(void)
* 全局变量:无
* 参数说明:无
* 返 回 值;无
* 功 能:延时函数,前边加static是为了限制该函数只在
* 本文件中使用
*****************************************************/
static void delay(void)
{
int i,j;
for(i=0;i<100;i++)
for(j=0;j<10;j++);
}
到这里,我已经把工程文件贴出来了,我已经将这个工程文档上传到了
http://download.csdn.net/detail/mybelief321/5455389请自行下载,直接编译下载到nor flash中去!注意是nor flash ,可不能使用调试功能。
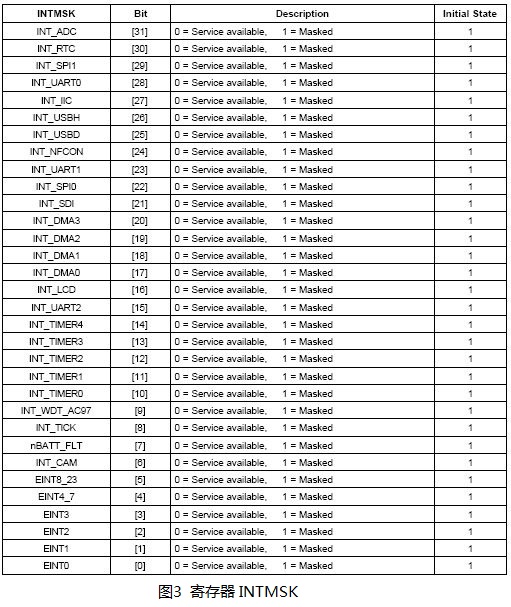
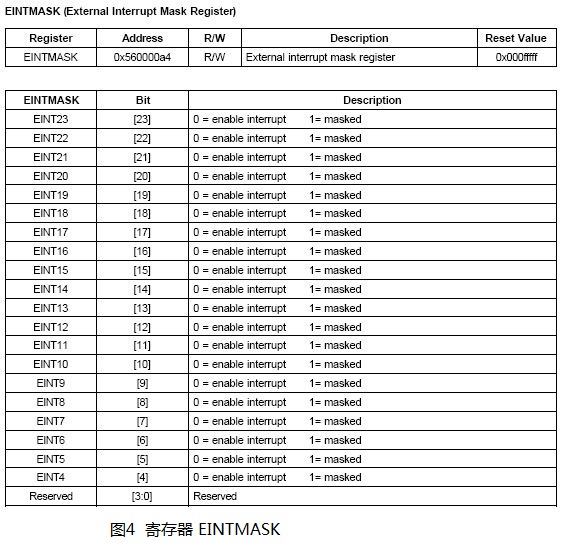
现在讲解一下文件 interrupt.c,在该文件中定义了中断初始化函数Irq_Init()。所谓的初始化中断就是将这4个按键对应的中断屏蔽位置为无效。由下图3可以看出,寄存器INTMSK中有单独的位来屏蔽外部中断0~3,外部中断8~23是公用一个位来屏蔽的(为什么不是每个外部中断对应一个位呢?主要原因是外部中断太多了,因此需要另外一个寄存器EINTMASK来实现中断屏蔽)。具体屏蔽哪一位,需要由寄存器EINTMASK来确定,寄存器EINTMASK的各位含义如图4所示。
外部中断的初始化工作结束,有的人可能会问:中断模式呢?中断优先级怎么配置呢?其实刚学可以不考虑这些(韦东山老师对中断讲的好),只要中断不被屏蔽,CPU就可以收到中断信号,中断模式默认是IRQ,中断优先级也有一个默认值。此外,具体的外部中断还可以选择触发方式,即高电平触发、低电平触发以及边沿触发等,这些由专门的寄存器(如外部中断控制寄存器EXINTn)来设置,采取默认值即可,默认情况下时低电平触发。
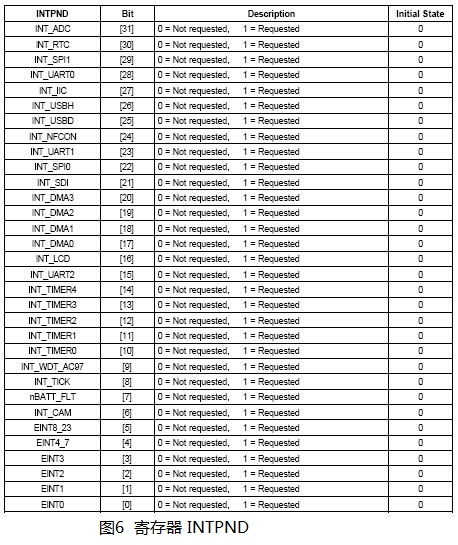
下面的问题时:CPU如何知道发生了中断呢?在处理器内部有专门的寄存器来记录哪个中断发生了。由图5可以看到,中断发生后,寄存器SRCPND中的相应位会置1,然后,如果该中断不被屏蔽,则寄存器INTPND中的相应位也会被置1,如下图6.
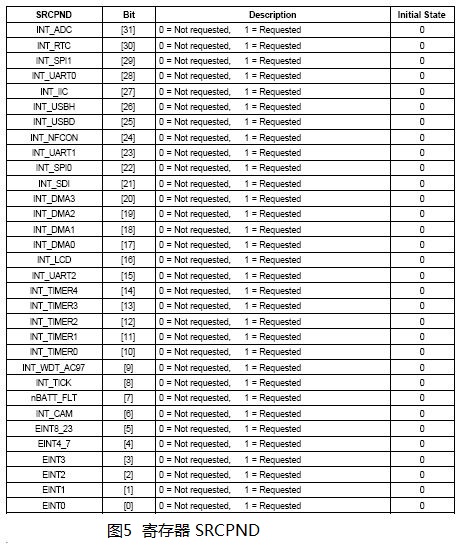
例如,当外部中断0发生时,寄存器SRCPND的第0位置1,在初始化阶段,如果该中断请求没有被屏蔽,那么寄存器SRCPND的第0位也会被置1。
寄存器SRCPND和INTPND中,外部中断8~23(EINT8~23)是公用一位的。具体是哪一个中断发生时,还需要借助寄存器EINTPEND,寄存器EINTPEND的各位含义如下图所示:
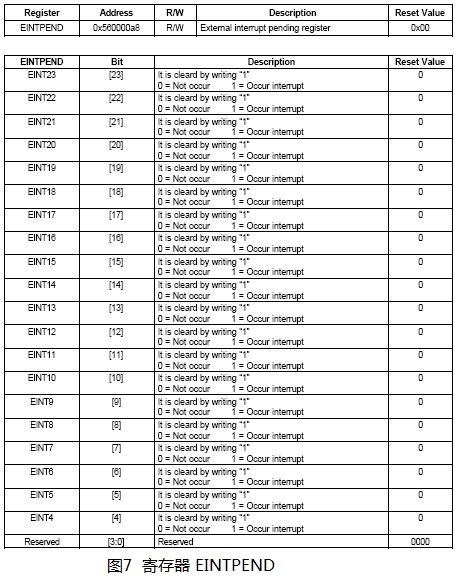
例如,若外部中断8发生时,寄存器SRCPND和INTPND的第5位置1,同时寄存器EINTPEND的第8位也置1,这时就可以确定外部中断4发生了。又如,当外部中断11发生时,寄存器SRCPND和INTPND的第5位也会置1,但此时寄存器EINTPEND的第11位会置1,因此这样就可以进一步确定是外部中断11发生了。
最后的问题是:执行完中断响应函数后,如何清除中断呢?只需要向寄存器SRCPND和INTPND的相应位写2即可清除中断标志,对于外部中断8~23,还需要清除寄存器EINTPEND中的相应位,也是向该位写1即可清除中断标志。
注意:清除顺序很重要:先清除EINTPEND,然后清除SRCPND,最后清除INTPND
例1:清除外部中断0标志
SRCPND|=1<<0;
INTPND|=1<<0;
例2:清除外部中断8标志
EINTPEND|=1<<8;
SRCPND|=1<<5;
INTPND|=1<<5;
对于IRQ模式的中断。S3C2440处理器还提供了一个寄存器INTOFFSET用来标志寄存器INTPND的那种类型发生了。寄存器INTOFFSET的各位定义如图8所示,当清除寄存器SRCPND和寄存器INTPND中相应的中断标志位后,寄存器INTOFFSET的值自动清零。
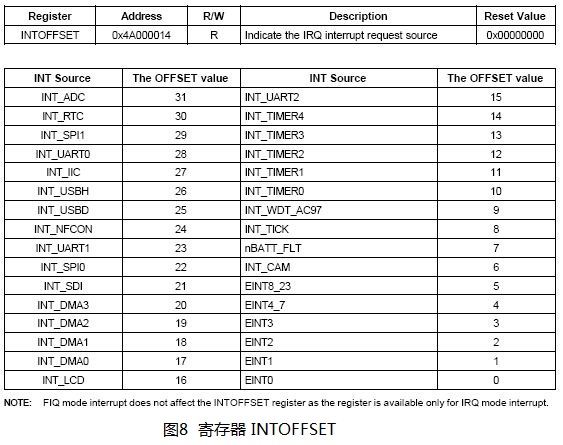
例如,若外部中断0发生且没有被屏蔽,则寄存器INTOFFSET的值为0;若定时器0中断发生且没有被屏蔽,则寄存器INTOFFSET的值为10。
__irq关键字:在isrservice.c中中断响应函数为void __irq IRQ_Handler(void) ,其中IRQ_Handler为函数名,这里名字不能变,因为在你的S3C2440.s代码中有这样一句话,

当发生IRQ中断时,程序跳转到标号IRQ_Handler处去执行,这里的标号就是咱们的中断服务函数的名字。
关键字__irq必须得加上,注意它和ADS中的不同点是,MDK中irq前边加俩个"_",ADS中前边只有一个“_”。
__irq关键字主要有以下作用:
①中断发生后,自动保存所有需要保存的寄存器
②中断返回时,自动计算中断返回地址,并自动将IRQ模式下寄存器SPSR_irq的值恢复到寄存器CPSR(中断进入什么模式,则将该模式下寄存器SPSR的值恢复到CPSR中)。
关于中断,还有几个问题咱们需要思考,下面我仅列出来,就不再说了,时间有限:
①当中断发生后,程序是如何跳转到中断处理函数呢?
②执行完中断处理函数后,如何返回到原来被打断的地方接着执行呢?
③ARM处理器的流水线结构对中断返回地址的计算有什么影响呢?
④ARM7处理器是3级流水线结构,ARM9处理器是5级流水线结构,为什么中断返回地址的计算会相同呢?
⑤ARM处理器有7种工作模式,发生中断后,处理器进入什么工作模式呢?
⑥发生中断后,哪些事情是AMR处理器自动完成的呢?哪些事情是需要编程实现的呢?
理解了这些问题,相信你对中断的掌握又会上升到一个高度呢!















 399
399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











