






学习卡尔曼滤波看了4天的文章,硬是没看懂.后来找到了下面的文章一下就看懂了.
我对卡尔曼滤波的理解,
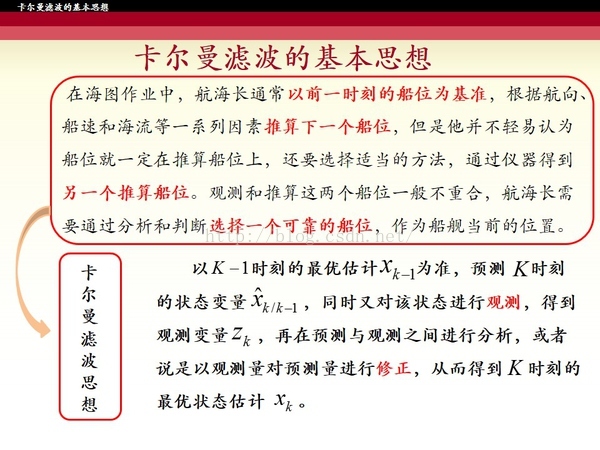
我认为,卡尔曼滤波就是把统计学应用到了滤波算法上.
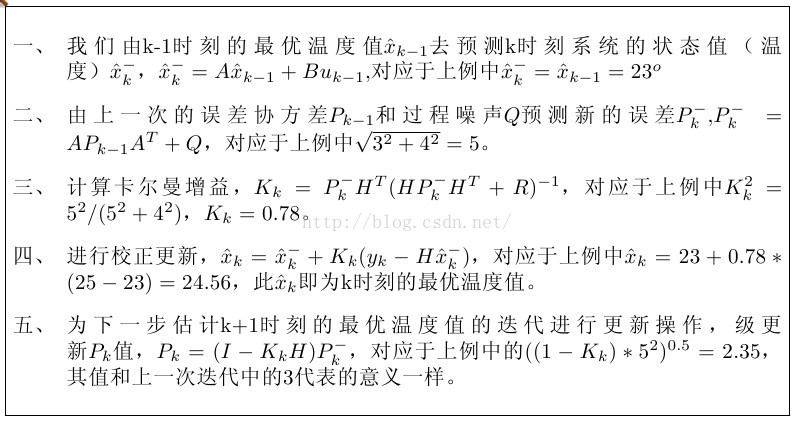
算法的核心思想是,根据当前的仪器"测量值" 和上一刻的 "预测量" 和 "误差",计算得到当前的最优量. 再 预测下一刻的量,
里面比较突出的是观点是. 把误差纳入计算, 而且分为预测误差和测量误差两种.通称为 噪声.
还有一个非常大的特点是,误差独立存在, 始终不受测量数据的影响.

上面的ppt有助于入门理解.
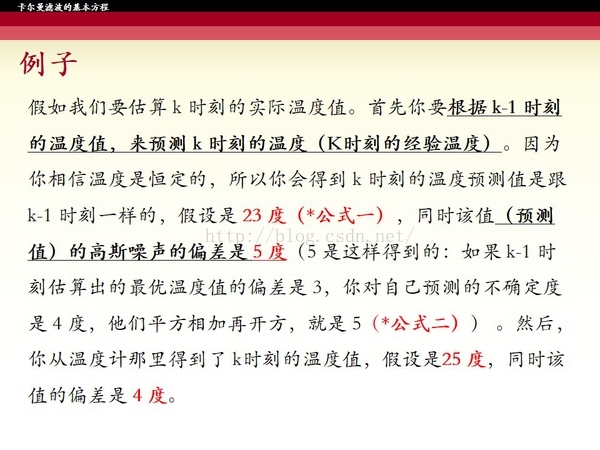
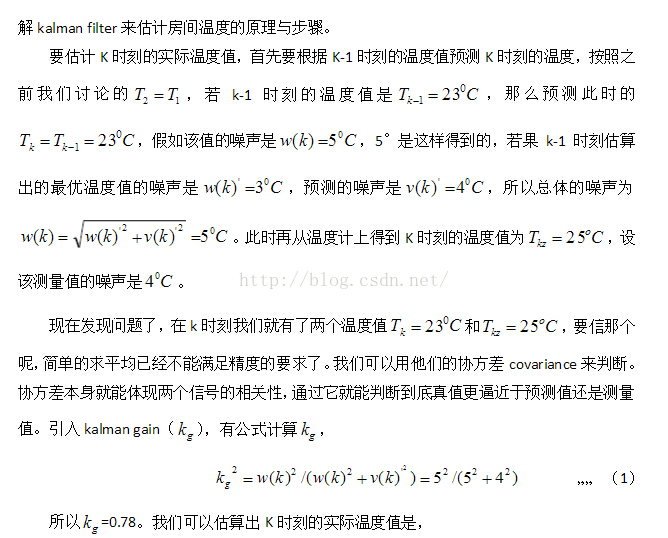
但是在编程的时候你会发现,解释里面的数值23 没有很明确的指出,是指的那个时刻的23 是预测的23 还是上一课测量的23
下面这段文字会有助于你更清晰的理解
卡尔曼滤波是统计学的程序表达.
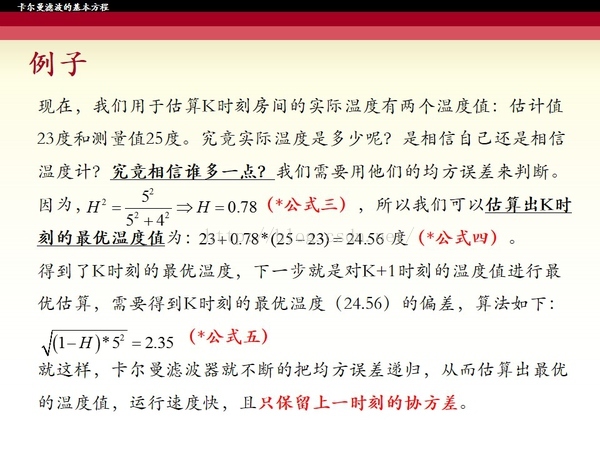
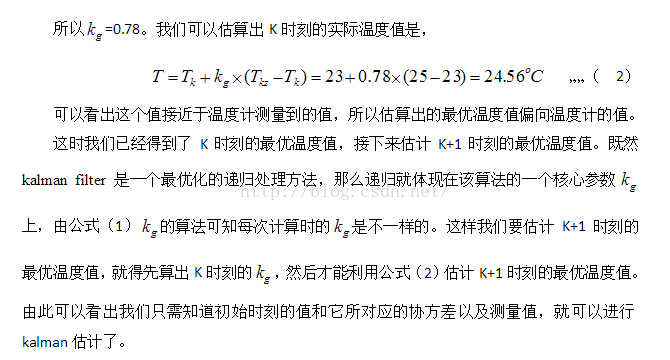
要想深入理解,公式三 协方差的背后意义 需要学习统计学.
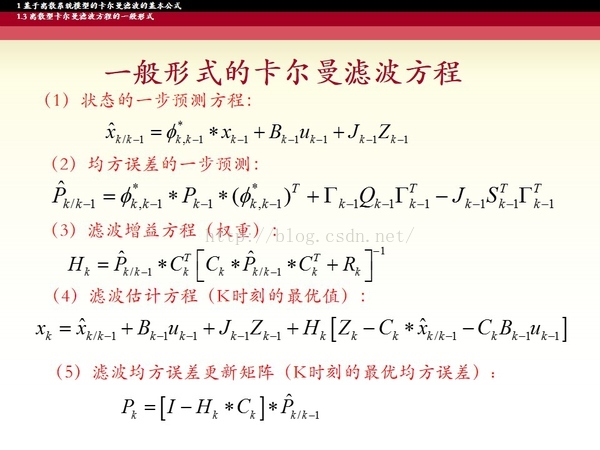
如果仅仅是使用的话,这5个公式套进程序里面还是很容易的.
看到这里如果你明白了原理, 你再回过头看看,会发现.误差是独立存在的. 误差不受数据的影响. 误差按照统计学的协方差公式更新, 跟数据无关.
而且误差是不断变化的.














 296
296











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









