






基于滑膜控制无人车辆轨迹跟踪控制
复现滑膜控制 多车道变换,MATLAB仿真
路径规划 无人船无人机 SMC控制
Sliding mode controller for trajectory tracking
ID:2329715179846595
南唐著名地椒糖
滑膜控制(Sliding mode control)是一种在非线性系统中应用广泛的控制方法。在无人车辆轨迹跟踪控制中,滑膜控制具有良好的鲁棒性和适应性能,在多车道变换、路径规划和无人船、无人机等领域都有着广泛的应用。
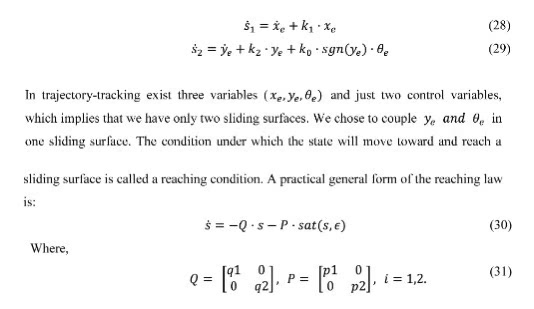
滑膜控制的基本思想是通过引入一个滑模面使系统状态在该滑模面上运动,并通过改变控制信号使系统状态迅速滑到滑模面上,从而实现对系统状态的精确控制。在无人车辆轨迹跟踪控制中,滑膜控制可以通过合理设计滑模面和控制律来实现车辆的精确跟踪。
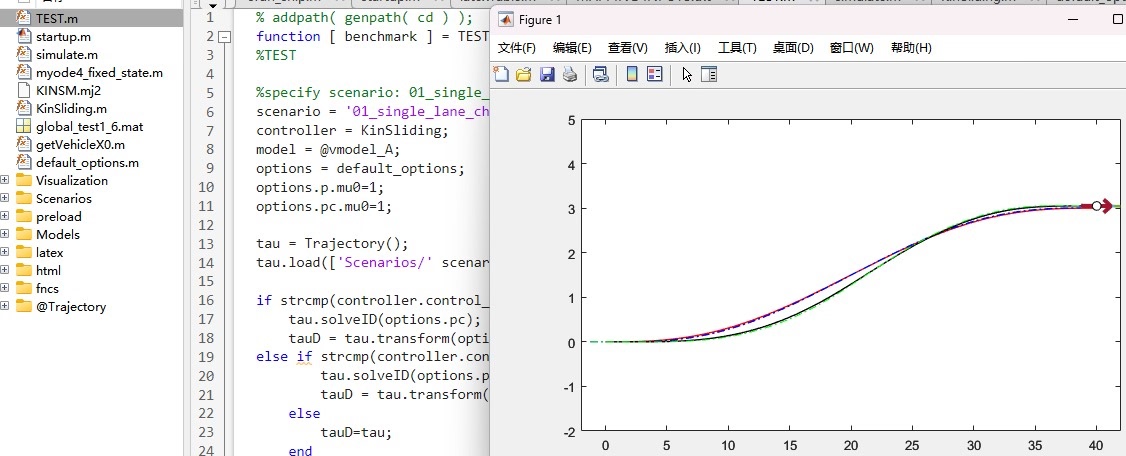
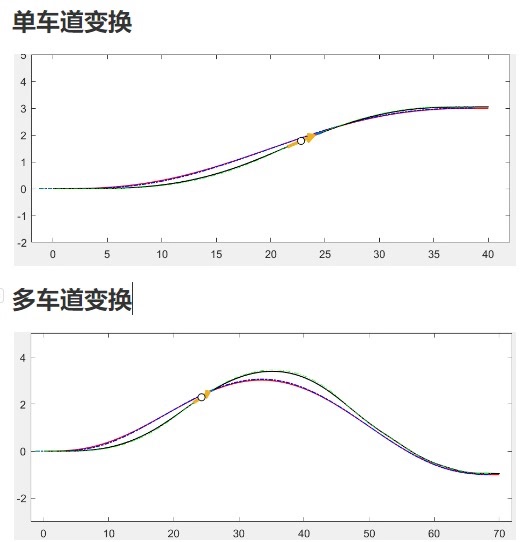
在多车道变换中,滑膜控制可以实现无人车辆在高速公路等多车道场景中的平稳变道。通过合理设计滑模面和控制律,可以使无人车辆在变道过程中保持稳定的转向轨迹,并避免与其他车辆的碰撞。
在路径规划中,滑膜控制可以实现对无人车辆行驶路径的优化控制。通过合理设计滑模面和控制律,可以使无人车辆按照规划的路径进行行驶,并在遇到障碍物或者其他突发情况时进行及时的调整,保证行驶的安全和稳定性。
在无人船和无人机等领域,滑膜控制也有着广泛的应用。通过合理设计滑模面和控制律,可以实现对无人船和无人机的精确控制,使其在海洋或者空中中能够按照预定的轨迹进行运动,并完成相应的任务。
为了验证滑膜控制在无人车辆轨迹跟踪控制中的有效性,可以利用MATLAB进行仿真实验。通过建立相应的车辆模型和滑膜控制模型,可以模拟出不同场景下的车辆行驶情况,并通过仿真结果来评估滑膜控制的性能。
综上所述,滑膜控制在无人车辆轨迹跟踪控制中具有广泛的应用前景。通过合理设计滑模面和控制律,可以实现车辆的精确跟踪、多车道变换、路径规划和无人船、无人机的控制。通过MATLAB仿真实验的复现,可以验证滑膜控制在实际应用中的有效性。相信随着无人车辆技术的不断发展,滑膜控制将在未来得到更广泛的应用。
【相关代码,程序地址】:http://fansik.cn/715179846595.html
















 776
776

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









