







博主介绍:✌全网粉丝50W+,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战8年之久,选择我们就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅🍅感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助同学们顺利毕业 。🍅
1、毕业设计:2026年计算机专业毕业设计选题汇总(建议收藏)✅
2、大数据毕业设计:2026年选题大全 深度学习 python语言 JAVA语言 hadoop和spark(建议收藏)✅
1、项目介绍
技术栈:
python语言、YOLOv8模型、PyTorch、PySide6界面、opencv、数据集
显示:类别数目、目标数目、帧率、模型
设置:模型选择、cond阈值、iou阈值、抽帧间隔、保存
支持:上传图片、视频、摄像投检测
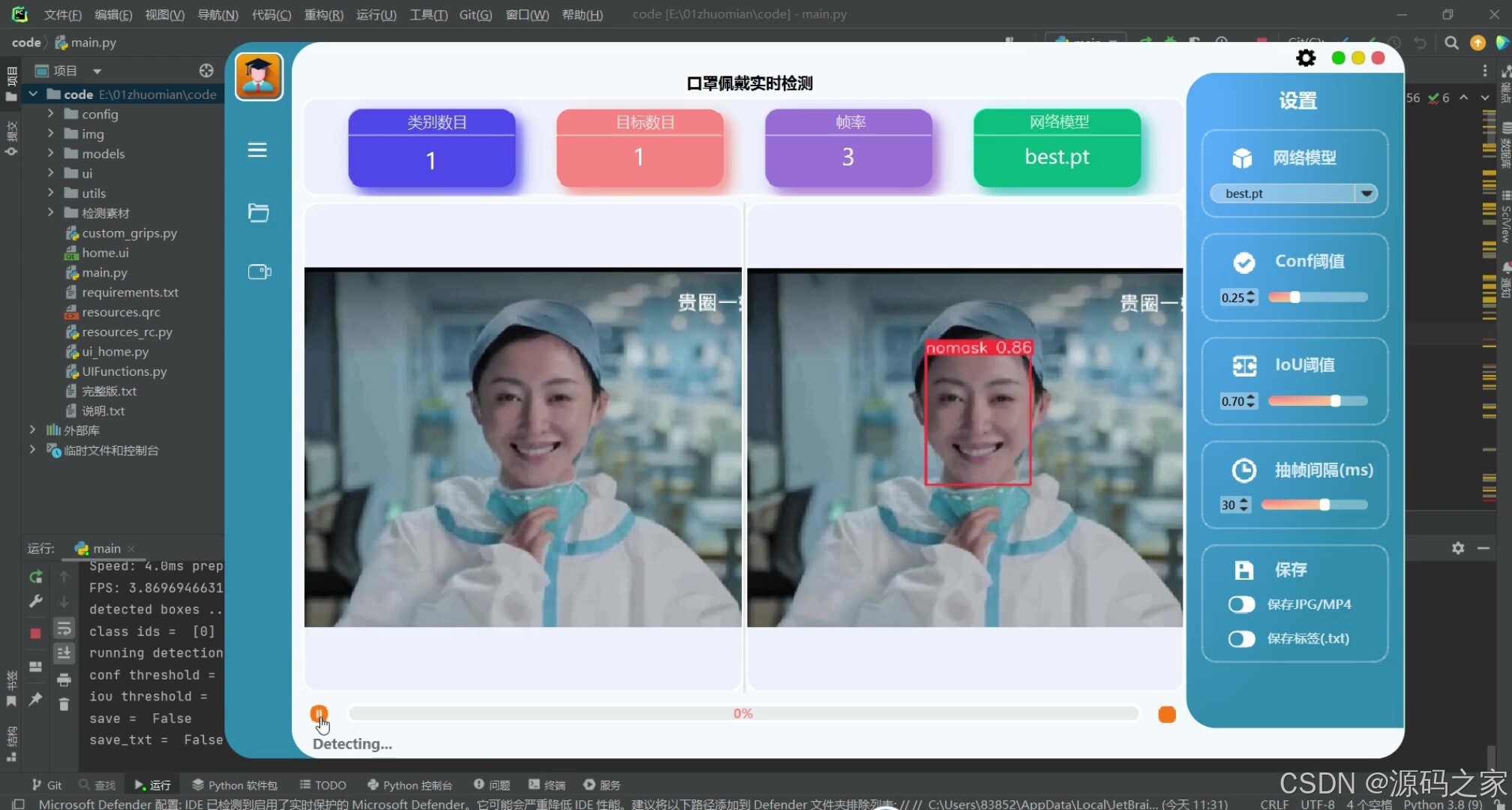
2、项目界面
(1)口罩实时检测识别----佩戴口罩、没佩戴口罩
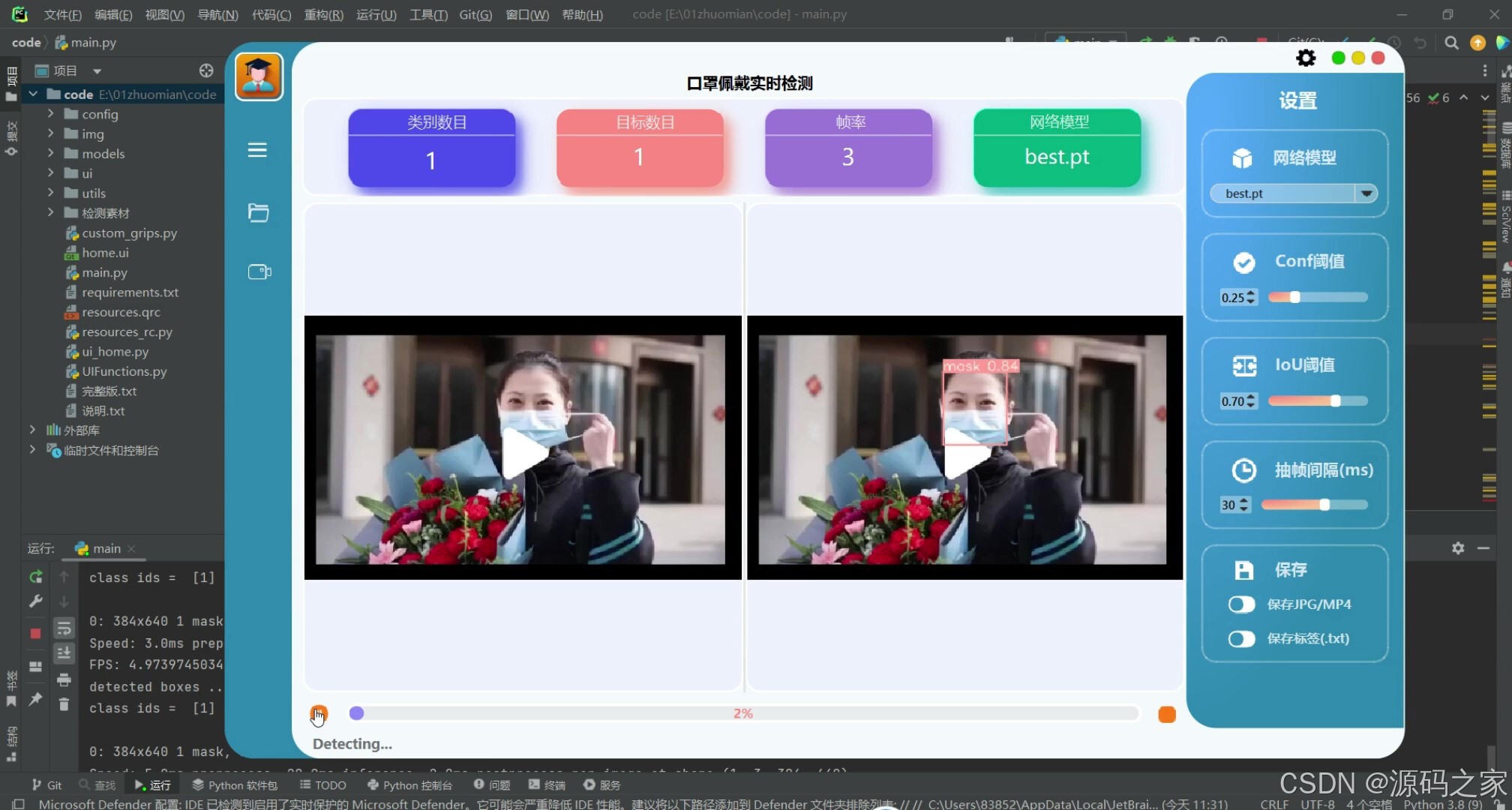
(2)口罩实时检测识别----佩戴口罩、没佩戴口罩
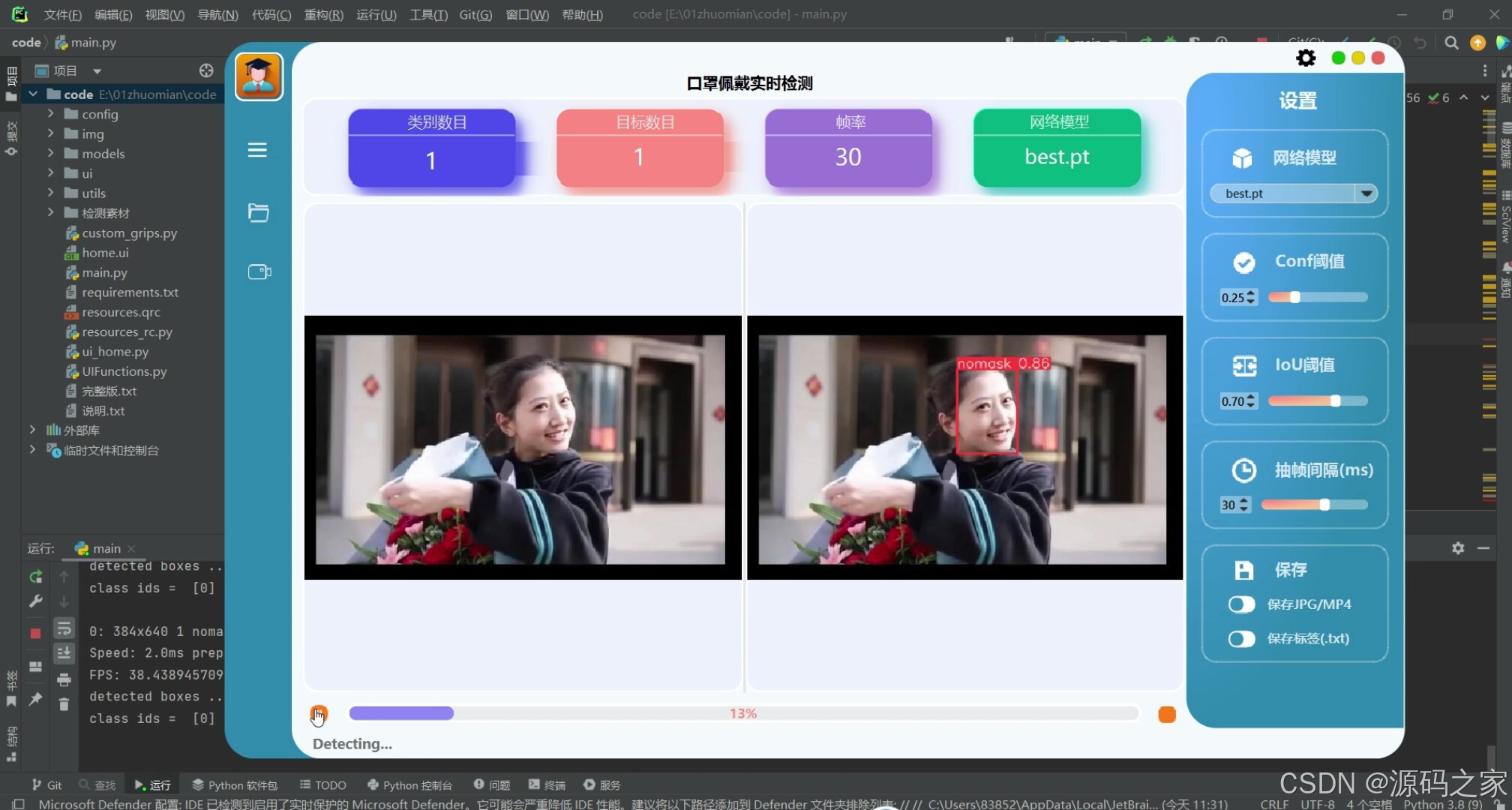
(3)口罩实时检测识别----佩戴口罩、没佩戴口罩
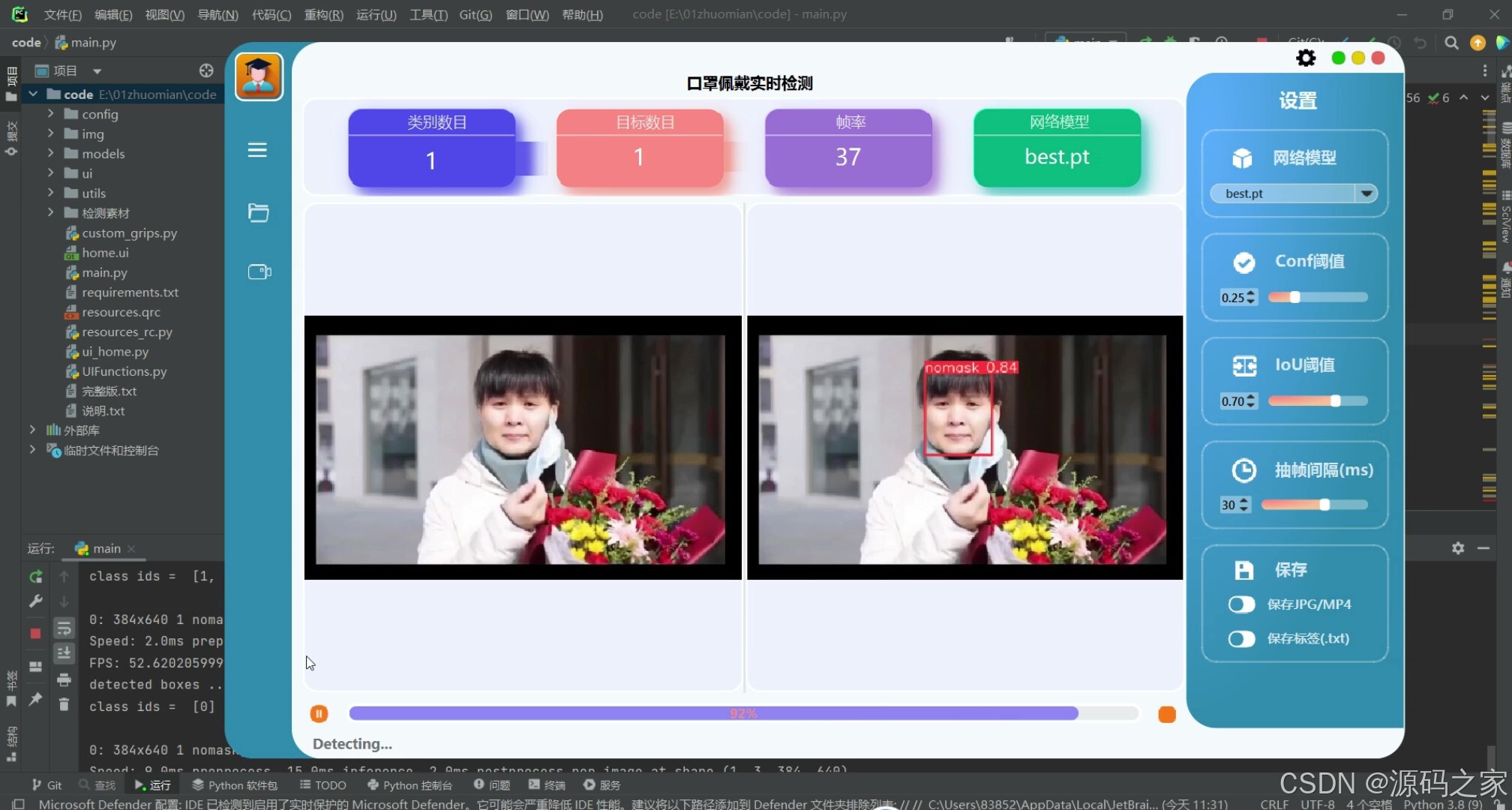
(4)口罩实时检测识别----佩戴口罩、没佩戴口罩
(5)口罩实时检测识别----佩戴口罩、没佩戴口罩

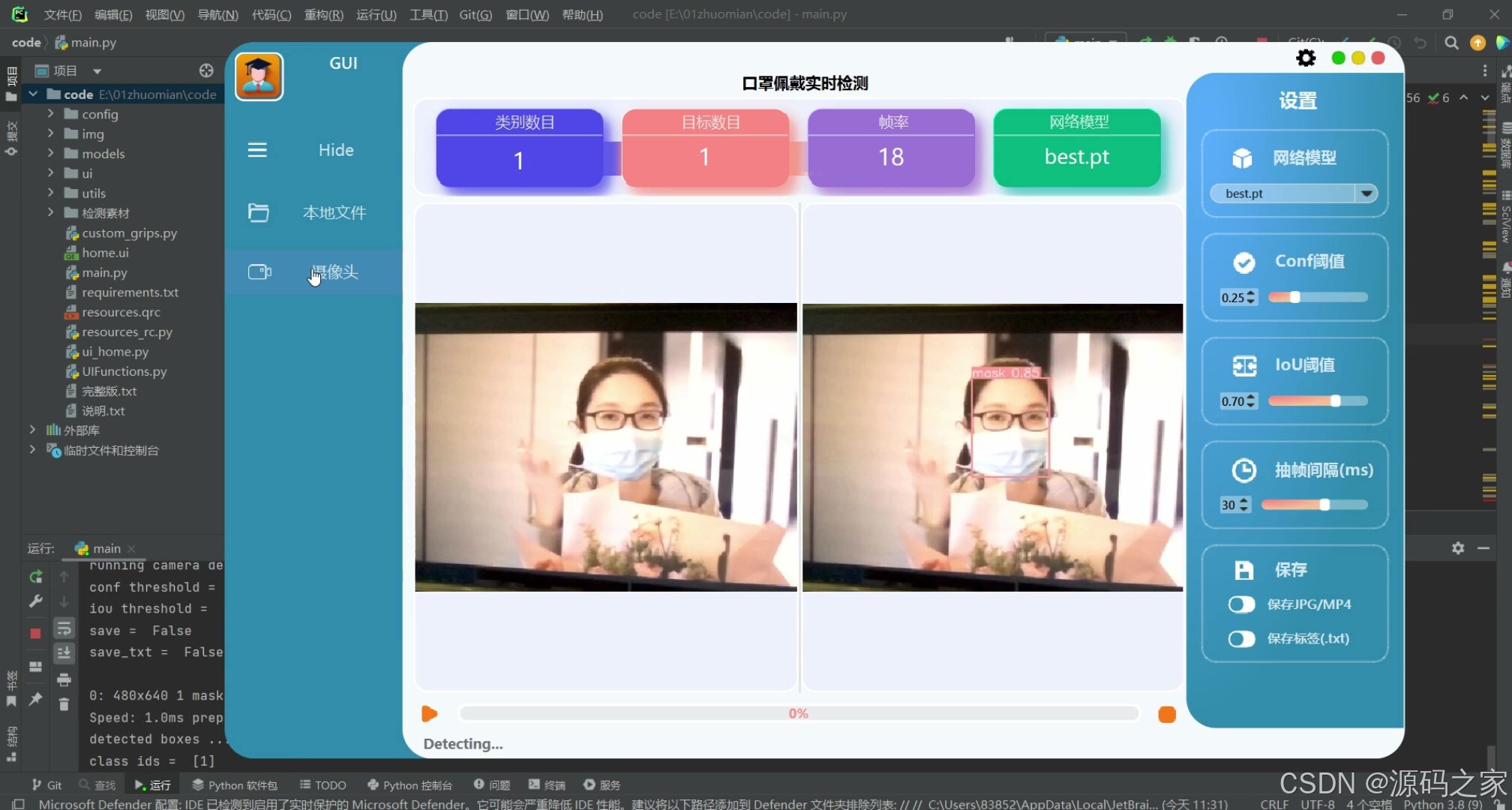
(6)摄像头实时检测
3、项目说明
技术栈:
python语言、YOLOv8模型、PyTorch、PySide6界面、opencv、数据集
口罩佩戴检测可以应用于公共场所的安全管理、疫情防控监测等多种场景。YOLOv8是前沿的目标检测技术,它基于先前 YOLO 版本在目标检测任务上的成功,进一步提升性能和灵活性。
本项目使用YOLOv8实现人脸口罩佩戴的实时检测。课程提供超万张已标注人脸口罩数据集。本项目会讲述本项目超万张人脸口罩数据集的制作方法,包括使用labelImg以及使用Python代码对第三方数据集进行清洗。训练后的YOLOv8可对真实场景下人脸口罩佩戴进行高精度实时检测。项目提供PySide6开发的可视化演示界面,可实时检测图像、视频、摄像头中的口罩佩戴。
本项目分别在Windows系统上做项目演示。
包括:安装软件环境(Nvidia显卡驱动、cuda和cudnn)、安装PyTorch、安装YOLOv8、准备数据集(自动划分训练集和验证集)、修改配置文件、训练数据集(合适的命令参数选择)、测试训练出的网络模型和性能统计、项目可视化演示界面。
4、核心代码
from ultralytics import YOLO
from PySide6.QtWidgets import QApplication, QMainWindow, QFileDialog, QMenu
from PySide6.QtGui import QImage, QPixmap, QColor
from PySide6.QtCore import QTimer, QThread, Signal, QObject, QPoint, Qt
from UIFunctions import *
from ui.home import Ui_MainWindow
#from utils.capnums import Camera
from utils.rtsp_win import Window
from collections import deque
import numpy as np
import time
import json
import sys
import cv2
import os
IMG_FORMATS = ('bmp', 'dng', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp', 'pfm') # image suffixes
VID_FORMATS = ('asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv', 'webm') # video suffixes
def is_video_file(path):
suffix = path.split('.')[-1].lower()
if suffix in IMG_FORMATS:
return False
elif suffix in VID_FORMATS:
return True
else:
print(f"Suffix '{suffix}' is invalid!")
raise ValueError("Invalid file suffix")
class YoloPredictor(QObject):
yolo2main_pre_img = Signal(np.ndarray) # raw image signal
yolo2main_res_img = Signal(np.ndarray) # test result signal
yolo2main_status_msg = Signal(str) # Detecting/pausing/stopping/testing complete/error reporting signal
yolo2main_fps = Signal(str) # fps
yolo2main_labels = Signal(dict) # Detected target results (number of each category)
yolo2main_progress = Signal(int) # Completeness
yolo2main_class_num = Signal(int) # Number of categories detected
yolo2main_target_num = Signal(int) # Targets detected
def __init__(self):
super().__init__()
# GUI args
self.used_model_name = None # The detection model name to use
self.source = '' # input source
self.stop_dtc = False # Termination detection
self.continue_dtc = True # pause
self.labels_dict = {} # return a dictionary of results
self.progress_value = 0 # progress bar
self.YoloConfig = dict()
self.YoloConfig['model'] = None
self.YoloConfig['iou'] = 0.70 # iou
self.YoloConfig['conf'] = 0.25 # conf
self.YoloConfig['rate'] = 30 # delay, ms
self.YoloConfig['save_res'] = False # Save test results
self.YoloConfig['save_txt'] = False # save label(txt) file
# Usable if setup is done
self.model = None
self.imgsz = None
self.device = None
self.dataset = None
self.vid_path, self.vid_writer = None, None
self.data_path = None
self.source_type = None
self.batch = None
self.fps_counter = 0
self.fps_frames = deque(maxlen=10) # 存储最近 10 帧的时间
self.fps = 0
def loadmodel(self):
if not self.model or self.used_model_name != self.YoloConfig['model']:
self.yolo2main_status_msg.emit('Loading Model...')
print('model used = ', self.YoloConfig['model'])
self.model = YOLO(self.YoloConfig['model'])
self.used_model_name = self.YoloConfig['model']
def run(self):
print("running detection ......")
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
if not is_video_file(self.source):
res = self.model.predict(self.source, save=self.YoloConfig['save_res'],
save_txt=self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'],
iou=self.YoloConfig['iou'], device=0)
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
print("FPS:", fps)
detected_boxes = res[0].boxes
# print(res[0])
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
# self.yolo2main_labels.emit(self.labels_dict) # webcam need to change the def write_results
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(int(fps)))
self.yolo2main_status_msg.emit('Detection completed')
else:
cap = cv2.VideoCapture(self.source)
# Loop through the video frames
count = 0 # run location frame
start_time = time.time() # used to calculate the frame rate
all_count = cap.get(cv2.CAP_PROP_FRAME_COUNT) # total frames
while cap.isOpened():
# Termination detection
if self.stop_dtc:
self.yolo2main_status_msg.emit('Detection terminated!')
self.stop_dtc = False
break
# Read a frame from the video
success, frame = cap.read()
count += 1 # frame count +1
self.progress_value = int(count / all_count * 1000) # progress bar(0~1000)
self.yolo2main_progress.emit(self.progress_value) # progress bar
if count % 5 == 0 and count >= 5: # Calculate the frame rate every 5 frames
self.yolo2main_fps.emit(str(int(5 / (time.time() - start_time))))
start_time = time.time()
if success:
# Run YOLOv8 inference on the frame
res = self.model.predict(frame, save=self.YoloConfig['save_res'], save_txt = self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'], iou=self.YoloConfig['iou'], device=0)
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
print("FPS:", fps)
detected_boxes = res[0].boxes
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
# if self.YoloConfig['rate'] != 0:
# time.sleep(self.YoloConfig['rate'] / 1000) # delay , ms
else:
# Break the loop if the end of the video is reached
self.yolo2main_status_msg.emit('Detection completed')
break
def run_camera(self, frame):
print("running camera detection ......")
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
res = self.model.predict(frame, save=self.YoloConfig['save_res'],
save_txt=self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'],
iou=self.YoloConfig['iou'], device=0)
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
fps = 1000 / total_infer_speed
#print("FPS:", fps)
# 每读取一帧增加计数器
self.fps_counter += 1
# 如果达到 10 帧,则计算 FPS
if self.fps_counter == 10:
elapsed_time = self.fps_frames[-1] - self.fps_frames[0] # 计算最近 10 帧的时间差
average_fps = 10 / elapsed_time
self.fps = int(average_fps)
print("Average FPS:", self.fps)
self.fps_counter = 0 # 重置计数器
self.fps_frames.clear() # 清空时间队列
# 记录当前时间
self.fps_frames.append(time.time())
detected_boxes = res[0].boxes
# print(res[0])
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(self.fps)) # FPS
def run_rtsp_frame(self, frame):
print("running rtsp/http stream detection ......")
print("stream source = ", self.source)
# set model
self.loadmodel()
self.yolo2main_status_msg.emit('Detecting...')
print('conf threshold = ', self.YoloConfig['conf'])
print('iou threshold = ', self.YoloConfig['iou'])
print('save = ', self.YoloConfig['save_res'])
print('save_txt = ', self.YoloConfig['save_txt'])
# Run YOLOv8 inference on the frame
res = self.model.predict(frame, save=self.YoloConfig['save_res'], save_txt = self.YoloConfig['save_txt'], imgsz=640, conf=self.YoloConfig['conf'], iou=self.YoloConfig['iou'], device=0)
preprocess_speed = res[0].speed['preprocess']
inference_speed = res[0].speed['inference']
postprocess_speed = res[0].speed['postprocess']
total_infer_speed = preprocess_speed + inference_speed + postprocess_speed
# 每读取一帧增加计数器
self.fps_counter += 1
# 如果达到 10 帧,则计算 FPS
if self.fps_counter == 10:
elapsed_time = self.fps_frames[-1] - self.fps_frames[0] # 计算最近 10 帧的时间差
average_fps = 10 / elapsed_time
self.fps = int(average_fps)
print("Average FPS:", self.fps)
self.fps_counter = 0 # 重置计数器
self.fps_frames.clear() # 清空时间队列
# 记录当前时间
self.fps_frames.append(time.time())
detected_boxes = res[0].boxes
print("detected boxes ......")
# Create an empty list to store the class IDs
class_ids = []
# Iterate over each box and extract the class ID
for box in detected_boxes:
class_id = box.cls # get the class id
class_id_cpu = class_id.cpu() # move the value to CPU
class_id_int = int(class_id_cpu.item()) # convert to integer
class_ids.append(class_id_int) # append to the list
# Print the class ID
print("class ids = ", class_ids)
total_classes = len(set(class_ids))
total_ids = len(class_ids)
# Send test results
orig_img = res[0].orig_img
annotated_img = res[0].plot()
self.yolo2main_pre_img.emit(orig_img) # Before testing
self.yolo2main_res_img.emit(annotated_img) # after detection
self.yolo2main_class_num.emit(total_classes)
self.yolo2main_target_num.emit(total_ids)
self.yolo2main_fps.emit(str(self.fps)) # FPS
class MainWindow(QMainWindow, Ui_MainWindow):
main2yolo_begin_sgl = Signal() # The main window sends an execution signal to the yolo instance
main2yolo_loadmodel_sgl = Signal() # The main window sends a load model signal to the yolo instance
def __init__(self, parent=None):
super(MainWindow, self).__init__(parent)
# basic interface
self.setupUi(self)
self.setAttribute(Qt.WA_TranslucentBackground) # rounded transparent
self.setWindowFlags(Qt.FramelessWindowHint) # Set window flag: hide window borders
UIFuncitons.uiDefinitions(self)
# Show module shadows
UIFuncitons.shadow_style(self, self.Class_QF, QColor(95, 95, 239))
UIFuncitons.shadow_style(self, self.Target_QF, QColor(251, 157, 139))
UIFuncitons.shadow_style(self, self.Fps_QF, QColor(170, 128, 213))
UIFuncitons.shadow_style(self, self.Model_QF, QColor(64, 186, 193))
# read model folder
self.pt_list = os.listdir('./models')
self.pt_list = [file for file in self.pt_list if file.endswith('.pt')]
self.pt_list.sort(key=lambda x: os.path.getsize('./models/' + x)) # sort by file size
self.model_box.clear()
self.model_box.addItems(self.pt_list)
self.Qtimer_ModelBox = QTimer(self) # Timer: Monitor model file changes every 2 seconds
self.Qtimer_ModelBox.timeout.connect(self.ModelBoxRefre)
self.Qtimer_ModelBox.start(2000)
# Yolo-v8 thread
self.yolo_predict = YoloPredictor() # Create a Yolo instance
self.select_model = self.model_box.currentText() # default model
self.yolo_predict.YoloConfig['model'] = "./models/%s" % self.select_model
self.yolo_thread = QThread() # Create yolo thread
self.yolo_predict.yolo2main_pre_img.connect(lambda x: self.show_image(x, self.pre_video))
self.yolo_predict.yolo2main_res_img.connect(lambda x: self.show_image(x, self.res_video))
self.yolo_predict.yolo2main_status_msg.connect(lambda x: self.show_status(x))
self.yolo_predict.yolo2main_fps.connect(lambda x: self.fps_label.setText(x))
self.yolo_predict.yolo2main_class_num.connect(lambda x:self.Class_num.setText(str(x)))
self.yolo_predict.yolo2main_target_num.connect(lambda x:self.Target_num.setText(str(x)))
self.yolo_predict.yolo2main_progress.connect(lambda x: self.progress_bar.setValue(x))
self.main2yolo_begin_sgl.connect(self.yolo_predict.run)
self.main2yolo_loadmodel_sgl.connect(self.yolo_predict.loadmodel)
self.yolo_predict.moveToThread(self.yolo_thread)
# Model parameters
self.model_box.currentTextChanged.connect(self.change_model)
self.iou_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'iou_spinbox')) # iou box
self.iou_slider.valueChanged.connect(lambda x:self.change_val(x, 'iou_slider')) # iou scroll bar
self.conf_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'conf_spinbox')) # conf box
self.conf_slider.valueChanged.connect(lambda x:self.change_val(x, 'conf_slider')) # conf scroll bar
self.speed_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'speed_spinbox'))# speed box
self.speed_slider.valueChanged.connect(lambda x:self.change_val(x, 'speed_slider')) # speed scroll bar
# Prompt window initialization
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
self.Model_name.setText(self.select_model)
# Select detection source
self.src_file_button.clicked.connect(self.open_src_file) # select local file
self.src_cam_button.clicked.connect(self.open_camera) #open_cam
# self.src_rtsp_button.clicked.connect(self.open_rtsp) #open_rtsp
# start testing button
self.run_button.clicked.connect(self.run_or_continue) # pause/start
self.stop_button.clicked.connect(self.stop) # termination
# Other function buttons
self.save_res_button.toggled.connect(self.is_save_res) # save image option
self.save_txt_button.toggled.connect(self.is_save_txt) # Save label option
self.ToggleBotton.clicked.connect(lambda: UIFuncitons.toggleMenu(self, True)) # left navigation button
self.settings_button.clicked.connect(lambda: UIFuncitons.settingBox(self, True)) # top right settings button
# initialization
self.load_config()
# The main window displays the original image and detection results
@staticmethod
def show_image(img_src, label):
try:
ih, iw, _ = img_src.shape
w = label.geometry().width()
h = label.geometry().height()
# keep the original data ratio
if iw/w > ih/h:
scal = w / iw
nw = w
nh = int(scal * ih)
img_src_ = cv2.resize(img_src, (nw, nh))
else:
scal = h / ih
nw = int(scal * iw)
nh = h
img_src_ = cv2.resize(img_src, (nw, nh))
frame = cv2.cvtColor(img_src_, cv2.COLOR_BGR2RGB)
img = QImage(frame.data, frame.shape[1], frame.shape[0], frame.shape[2] * frame.shape[1],
QImage.Format_RGB888)
label.setPixmap(QPixmap.fromImage(img))
except Exception as e:
print(repr(e))
# Control start/pause
def run_or_continue(self):
if self.yolo_predict.source == '':
self.show_status('Please select a image/video source before starting detection...')
self.run_button.setChecked(False)
else:
self.yolo_predict.stop_dtc = False
if self.run_button.isChecked():
self.run_button.setChecked(True) # start button
self.save_txt_button.setEnabled(False) # It is forbidden to check and save after starting the detection
self.save_res_button.setEnabled(False)
self.show_status('Detecting...')
self.yolo_predict.continue_dtc = True # Control whether Yolo is paused
if not self.yolo_thread.isRunning():
self.yolo_thread.start()
self.main2yolo_begin_sgl.emit()
else:
self.yolo_predict.continue_dtc = False
self.show_status("Pause...")
self.run_button.setChecked(False) # start button
# bottom status bar information
def show_status(self, msg):
self.status_bar.setText(msg)
if msg == 'Detection completed':
self.save_res_button.setEnabled(True)
self.save_txt_button.setEnabled(True)
self.run_button.setChecked(False)
self.progress_bar.setValue(0)
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end process
elif msg == 'Detection terminated!':
self.save_res_button.setEnabled(True)
self.save_txt_button.setEnabled(True)
self.run_button.setChecked(False)
self.progress_bar.setValue(0)
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end process
self.pre_video.clear() # clear image display
self.res_video.clear()
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
# select local file
def open_src_file(self):
config_file = 'config/fold.json'
config = json.load(open(config_file, 'r', encoding='utf-8'))
open_fold = config['open_fold']
if not os.path.exists(open_fold):
open_fold = os.getcwd()
name, _ = QFileDialog.getOpenFileName(self, 'Video/image', open_fold, "Pic File(*.mp4 *.mkv *.avi *.flv *.jpg *.png)")
if name:
self.yolo_predict.source = name
self.show_status('Loaded File:{}'.format(os.path.basename(name)))
config['open_fold'] = os.path.dirname(name)
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
#self.stop()
def open_camera(self):
"""Initialize camera.
"""
print("open camera...")
self.capture = cv2.VideoCapture(0)
self.video_size = QSize(640, 480) # 设置视频帧的宽度和高度
self.capture.set(cv2.CAP_PROP_FRAME_WIDTH, self.video_size.width())
self.capture.set(cv2.CAP_PROP_FRAME_HEIGHT, self.video_size.height())
self.timer_cam = QTimer()
self.timer_cam.timeout.connect(self.predict_cam_stream)
if self.yolo_predict.YoloConfig['rate'] != 0:
self.timer_cam.start(self.yolo_predict.YoloConfig['rate'])
def predict_cam_stream(self):
"""Predict frame from camera
"""
_, frame = self.capture.read()
self.yolo_predict.run_camera(frame)
if self.yolo_predict.stop_dtc:
self.timer_cam.stop()
self.yolo_predict.yolo2main_status_msg.emit('Detection terminated!')
self.yolo_predict.stop_dtc = False
# select network source
def open_rtsp(self):
print("open rtsp/http ...")
self.rtsp_window = Window()
config_file = 'config/ip.json'
if not os.path.exists(config_file):
ip = "http://10.0.0.29:8554/test"
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
ip = config['ip']
self.rtsp_window.rtspEdit.setText(ip)
self.rtsp_window.show()
self.rtsp_window.rtspButton.clicked.connect(lambda: self.load_rtsp(self.rtsp_window.rtspEdit.text()))
# load network sources
def load_rtsp(self, ip):
self.rtsp_window.close()
try:
self.yolo_predict.source = ip
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open('config/ip.json', 'w', encoding='utf-8') as f:
f.write(new_json)
self.show_status('Loading stream:{}'.format(ip))
self.capture = cv2.VideoCapture(ip)
if not self.capture.isOpened():
print("failed to open stream source.")
else:
print("stream source opened.")
self.timer_rtsp = QTimer()
self.timer_rtsp.timeout.connect(self.predict_rtsp_stream)
if self.yolo_predict.YoloConfig['rate'] !=0:
self.timer_rtsp.start(self.yolo_predict.YoloConfig['rate'])
except Exception as e:
self.show_status('%s' % e)
def predict_rtsp_stream(self):
"""Read frame from rtsp/http stream.
"""
_, frame = self.capture.read()
self.yolo_predict.run_rtsp_frame(frame)
if self.yolo_predict.stop_dtc:
self.timer_rtsp.stop()
self.yolo_predict.yolo2main_status_msg.emit('Detection terminated!')
self.yolo_predict.stop_dtc = False
# Save test result button--picture/video
def is_save_res(self):
if self.save_res_button.checkState() == Qt.CheckState.Unchecked:
self.show_status('NOTE: Run image results are not saved.')
self.yolo_predict.YoloConfig['save_res'] = False
elif self.save_res_button.checkState() == Qt.CheckState.Checked:
self.show_status('NOTE: Run image results will be saved.')
self.yolo_predict.YoloConfig['save_res'] = True
# Save test result button -- label (txt)
def is_save_txt(self):
if self.save_txt_button.checkState() == Qt.CheckState.Unchecked:
self.show_status('NOTE: Labels results are not saved.')
self.yolo_predict.YoloConfig['save_txt'] = False
elif self.save_txt_button.checkState() == Qt.CheckState.Checked:
self.show_status('NOTE: Labels results will be saved.')
self.yolo_predict.YoloConfig['save_txt'] = True
# Configuration initialization ~~~wait to change~~~
def load_config(self):
config_file = 'config/setting.json'
if not os.path.exists(config_file):
iou = 0.70
conf = 0.25
rate = 30
save_res = 0
save_txt = 0
new_config = {"iou": iou,
"conf": conf,
"rate": rate,
"save_res": save_res,
"save_txt": save_txt
}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
if len(config) != 5:
iou = 0.70
conf = 0.25
rate = 30
save_res = 0
save_txt = 0
else:
iou = config['iou']
conf = config['conf']
rate = config['rate']
save_res = config['save_res']
save_txt = config['save_txt']
self.yolo_predict.YoloConfig['iou'] = iou
self.yolo_predict.YoloConfig['conf'] = conf
self.yolo_predict.YoloConfig['rate'] = rate
self.iou_spinbox.setValue(iou)
self.conf_spinbox.setValue(conf)
self.speed_slider.setValue(rate)
self.save_res_button.setCheckState(Qt.CheckState(save_res))
self.yolo_predict.YoloConfig['save_res'] = (False if save_res==0 else True )
self.save_txt_button.setCheckState(Qt.CheckState(save_txt))
self.yolo_predict.YoloConfig['save_txt'] = (False if save_txt==0 else True )
self.run_button.setChecked(False)
self.show_status("Welcome~")
# Terminate button and associated state
def stop(self):
if self.yolo_thread.isRunning():
self.yolo_thread.quit() # end thread
self.yolo_predict.stop_dtc = True
self.run_button.setChecked(False) # start key recovery
self.save_res_button.setEnabled(True) # Ability to use the save button
self.save_txt_button.setEnabled(True) # Ability to use the save button
self.pre_video.clear() # clear image display
self.res_video.clear() # clear image display
self.progress_bar.setValue(0)
self.Class_num.setText('--')
self.Target_num.setText('--')
self.fps_label.setText('--')
# Change detection parameters
def change_val(self, x, flag):
if flag == 'iou_spinbox':
self.iou_slider.setValue(int(x*100)) # The box value changes, changing the slider
elif flag == 'iou_slider':
self.iou_spinbox.setValue(x/100) # The slider value changes, changing the box
self.show_status('IOU Threshold: %s' % str(x/100))
self.yolo_predict.YoloConfig['iou'] = x/100
elif flag == 'conf_spinbox':
self.conf_slider.setValue(int(x*100))
elif flag == 'conf_slider':
self.conf_spinbox.setValue(x/100)
self.show_status('Conf Threshold: %s' % str(x/100))
self.yolo_predict.YoloConfig['conf'] = x/100
elif flag == 'speed_spinbox':
self.speed_slider.setValue(x)
elif flag == 'speed_slider':
self.speed_spinbox.setValue(x)
self.show_status('Delay: %s ms' % str(x))
self.yolo_predict.YoloConfig['speed'] = x # ms
# change model
def change_model(self,x):
self.select_model = self.model_box.currentText()
self.yolo_predict.YoloConfig['model'] = "./models/%s" % self.select_model
self.show_status('Change Model:%s' % self.select_model)
self.Model_name.setText(self.select_model)
# load model signal emission
self.main2yolo_loadmodel_sgl.emit()
# Cycle monitoring model file changes
def ModelBoxRefre(self):
pt_list = os.listdir('./models')
pt_list = [file for file in pt_list if file.endswith('.pt')]
pt_list.sort(key=lambda x: os.path.getsize('./models/' + x))
# It must be sorted before comparing, otherwise the list will be refreshed all the time
if pt_list != self.pt_list:
self.pt_list = pt_list
self.model_box.clear()
self.model_box.addItems(self.pt_list)
# Get the mouse position (used to hold down the title bar and drag the window)
def mousePressEvent(self, event):
p = event.globalPosition()
globalPos = p.toPoint()
self.dragPos = globalPos
# Optimize the adjustment when dragging the bottom and right edges of the window size
def resizeEvent(self, event):
# Update Size Grips
UIFuncitons.resize_grips(self)
# Exit Exit thread, save settings
def closeEvent(self, event):
config_file = 'config/setting.json'
config = dict()
config['iou'] = self.iou_spinbox.value()
config['conf'] = self.conf_spinbox.value()
config['rate'] = self.speed_spinbox.value()
config['save_res'] = (0 if self.save_res_button.checkState()==Qt.Unchecked else 2)
config['save_txt'] = (0 if self.save_txt_button.checkState()==Qt.Unchecked else 2)
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
# Exit the process before closing
if self.yolo_thread.isRunning():
self.yolo_predict.stop_dtc = True
self.yolo_thread.quit()
MessageBox(
self.close_button, title='Note', text='Exiting, please wait...', time=3000, auto=True).exec()
sys.exit(0)
else:
sys.exit(0)
if __name__ == "__main__":
app = QApplication(sys.argv)
Home = MainWindow()
Home.show()
sys.exit(app.exec())
5、源码获取方式
biyesheji0005 或 biyesheji0001 (绿色聊天软件)
🍅由于篇幅限制,获取完整文章或源码、代做项目的,查看我的【用户名】、【专栏名称】、【顶部选题链接】就可以找到我啦🍅
感兴趣的可以先收藏起来,点赞、关注不迷路,下方查看👇🏻获取联系方式👇🏻

















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









