










目录
关键字:
CCP:Can Calibration Protocol
CRO:Command Receive Object
DTO:Data Transmission Object
本文旨在帮助大家理解CCP中Polling通信过程。
相关推荐阅读(点击下方5个链接即可):
1、如何使用CANape实现XCP/CCP“Measurement测量”和“Calibration标定”变量
2、如何使用CANape查看CAN Message ID和Signal信号
3、【图解CCP协议的CAN通信过程】-1_打开关闭CANape软件过程
4、【图解CCP协议的CAN通信过程】-3_DAQ通信观测变量/信号
5、【图解CCP协议的CAN通信过程】-4_Calibration标定过程
ASAM MCD-1 CCP是在标定工具(如CANape,INCA..)和ECU之间定义了CAN特定的标定协议。本文旨在帮助大家理解CCP的通信过程(如果有选择,ASAM建议使用ASAM MCD-1 XCP)。
打开CANape软件,点击Start按钮后,截取到的CAN报文;
1、Polling模式-观测一个信号
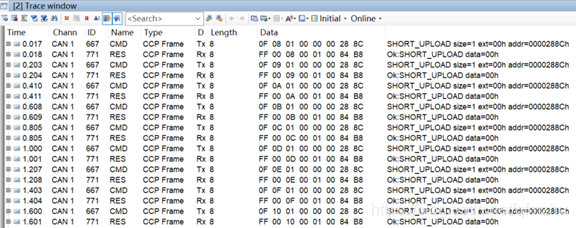
37.082710 1 667 Rx d 8 0F 08 01 00 00 00 28 8C
37.083081 1 771 Rx d 8 FF 00 08 00 01 00 84 B8
37.268597 1 667 Rx d 8 0F 09 01 00 00 00 28 8C
37.268968 1 771 Rx d 8 FF 00 09 00 01 00 84 B8
37.476217 1 667 Rx d 8 0F 0A 01 00 00 00 28 8C
37.476587 1 771 Rx d 8 FF 00 0A 00 01 00 84 B8
2、Polling模式-观测两个信号

109.184669 1 667 Rx d 8 0F 9F 01 00 00 00 16 E2
109.185038 1 771 Rx d 8 FF 00 9F 00 01 00 84 B8
109.193870 1 667 Rx d 8 0F A0 01 00 00 00 28 8C
109.194236 1 771 Rx d 8 FF 00 A0 00 01 00 84 B8
109.378565 1 667 Rx d 8 0F A1 01 00 00 00 16 E2
109.378932 1 771 Rx d 8 FF 00 A1 00 01 00 84 B8
109.389283 1 667 Rx d 8 0F A2 01 00 00 00 28 8C
109.390002 1 771 Rx d 8 FF 00 A2 00 01 00 84 B8
109.584818 1 667 Rx d 8 0F A3 01 00 00 00 16 E2
109.585183 1 771 Rx d 8 FF 00 A3 00 01 00 84 B8
109.595747 1 667 Rx d 8 0F A4 01 00 00 00 28 8C
109.596114 1 771 Rx d 8 FF 00 A4 00 01 00 84 B8
3、Polling模式-观测更多信号
注意:Polling模式下,如果观测的信号太多,会导致那些观测周期较短信号的观测周期拉长。
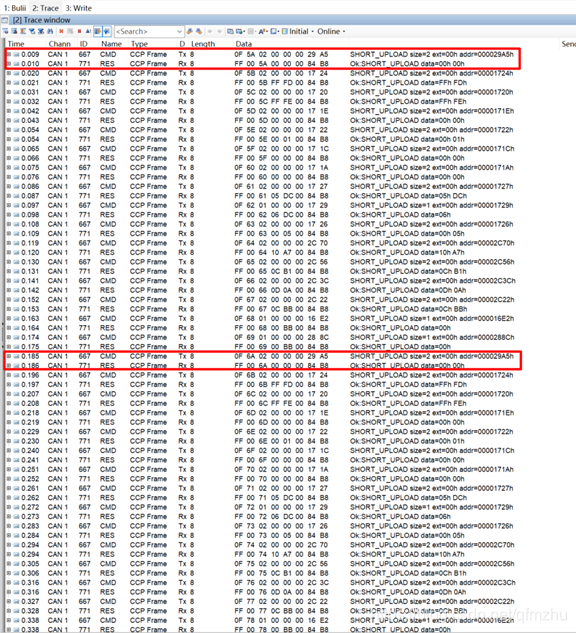
/*************************第一个循环*****************************/
52.297584 1 667 Rx d 8 0F 5A 02 00 00 00 29 A5
52.297955 1 771 Rx d 8 FF 00 5A 00 00 00 84 B8
52.308618 1 667 Rx d 8 0F 5B 02 00 00 00 17 24
52.308990 1 771 Rx d 8 FF 00 5B FF FD 00 84 B8
52.319657 1 667 Rx d 8 0F 5C 02 00 00 00 17 20
52.320030 1 771 Rx d 8 FF 00 5C FF FE 00 84 B8
52.330703 1 667 Rx d 8 0F 5D 02 00 00 00 17 1E
52.331089 1 771 Rx d 8 FF 00 5D 00 00 00 84 B8
52.341717 1 667 Rx d 8 0F 5E 02 00 00 00 17 22
52.342185 1 771 Rx d 8 FF 00 5E 00 01 00 84 B8
52.352825 1 667 Rx d 8 0F 5F 02 00 00 00 17 1C
52.353546 1 771 Rx d 8 FF 00 5F 00 00 00 84 B8
52.363613 1 667 Rx d 8 0F 60 02 00 00 00 17 1A
52.364084 1 771 Rx d 8 FF 00 60 00 00 00 84 B8
52.374530 1 667 Rx d 8 0F 61 02 00 00 00 17 27
52.374897 1 771 Rx d 8 FF 00 61 05 DC 00 84 B8
52.385386 1 667 Rx d 8 0F 62 01 00 00 00 17 29
52.385751 1 771 Rx d 8 FF 00 62 06 DC 00 84 B8
52.396355 1 667 Rx d 8 0F 63 02 00 00 00 17 26
52.396722 1 771 Rx d 8 FF 00 63 00 05 00 84 B8
52.407337 1 667 Rx d 8 0F 64 02 00 00 00 2C 70
52.407704 1 771 Rx d 8 FF 00 64 10 A7 00 84 B8
52.418378 1 667 Rx d 8 0F 65 02 00 00 00 2C 56
52.419076 1 771 Rx d 8 FF 00 65 0C B1 00 84 B8
52.429275 1 667 Rx d 8 0F 66 02 00 00 00 2C 3C
52.429977 1 771 Rx d 8 FF 00 66 0D 0A 00 84 B8
52.440296 1 667 Rx d 8 0F 67 02 00 00 00 2C 22
52.441005 1 771 Rx d 8 FF 00 67 0C BB 00 84 B8
52.451361 1 667 Rx d 8 0F 68 01 00 00 00 16 E2
52.452081 1 771 Rx d 8 FF 00 68 00 BB 00 84 B8
52.462192 1 667 Rx d 8 0F 69 01 00 00 00 28 8C
52.462654 1 771 Rx d 8 FF 00 69 00 BB 00 84 B8
/*************************第二个循环*****************************/
52.473769 1 667 Rx d 8 0F 6A 02 00 00 00 29 A5
52.474140 1 771 Rx d 8 FF 00 6A 00 00 00 84 B8
52.484136 1 667 Rx d 8 0F 6B 02 00 00 00 17 24
52.484602 1 771 Rx d 8 FF 00 6B FF FD 00 84 B8
52.495121 1 667 Rx d 8 0F 6C 02 00 00 00 17 20
52.495835 1 771 Rx d 8 FF 00 6C FF FE 00 84 B8
52.506329 1 667 Rx d 8 0F 6D 02 00 00 00 17 1E
52.506700 1 771 Rx d 8 FF 00 6D 00 00 00 84 B8
52.517272 1 667 Rx d 8 0F 6E 02 00 00 00 17 22
52.517643 1 771 Rx d 8 FF 00 6E 00 01 00 84 B8
4、报文注释
4.1 Short Upload短上传
37.082710 1 667 Rx d 8 0F 08 01 00 00 00 28 8C
37.083081 1 771 Rx d 8 FF 00 08 00 01 00 84 B8
CTO请求报文格式:
| Position(Byte) | Type | Description | Log报文 |
| 0 | byte | Command Code = SHORT_UP 0x0F 命令代码= SHORT_UP 0x0F | 0F |
| 1 | byte | Command Counter = CTR 命令计数器 | 08 |
| 2 | byte | Size of data block to be uploaded in bytes(1...5) 要上传的数据块的大小,以字节为单位(1 ... 5) 注意:这里的“数据块”可以理解为“观测量的信号长度:uint8=1; uint16=2; uint32=4…” | 01 |
| 3 | byte | Address extension 地址扩展 | 00 |
| 4~7 | unsigned long | Address 地址 | 00 00 28 8C |
DTO响应报文格式:
| Position(Byte) | Type | Description | Log报文 |
| 0 | byte | Packet ID: 0xFF 包标识:0xFF | FF |
| 1 | byte | Command Return Code 命令返回码 | 00 |
| 2 | byte | Command Counter = CTR 命令计数器 | 08 |
| 3~7 | bytes | requested data bytes 请求的数据字节 | 00 01 00 84 B8 |
相关推荐阅读(点击下方两个链接即可):
1、如何使用CANape实现XCP/CCP“Measurement测量”和“Calibration标定”变量
2、如何使用CANape查看CAN Message ID和Signal信号
3、【图解CCP协议的CAN通信过程】-1_打开关闭CANape软件过程
4、【图解CCP协议的CAN通信过程】-3_DAQ通信观测变量/信号
5、【图解CCP协议的CAN通信过程】-4_Calibration标定过程
5、结尾
















 2298
2298











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











