







项目最近正好用上kalman滤波器,故整理一下kalman滤波器相关资料,网上有很多详细的kalman资料,参考如下:
1、https://zhuanlan.zhihu.com/p/34656822
2、https://blog.csdn.net/m0_37953670/article/details/89528002
由于项目处理的是一维信号,过滤噪点,故上面2篇文献足够完成项目
以其中的一篇参考资料为例:
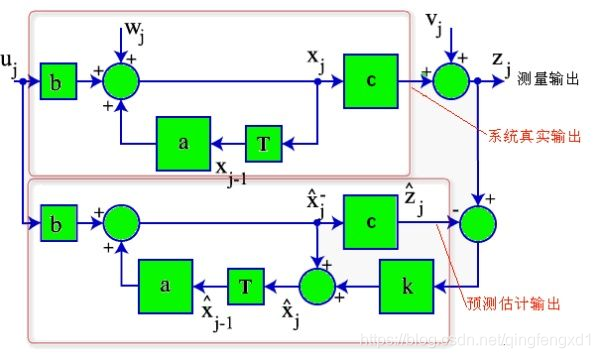
卡尔曼滤波器的递归过程:
-
估计时刻k 的状态:
X(k) = AX(k-1) + Bu(k)
这里, u(k) 是系统输入,在项目中,一维输入信号A=1 -
计算误差相关矩阵P, 度量估计值的精确程度:
P(k) = A*P(k-1)*A’+ Q
这里, Q = E{ Wj^2 } 是系统噪声的协方差阵,即系统框图中的Wj的协方差阵, Q 应该是不断变化的,为了简化,当作一个常数矩阵。 -
计算卡尔曼增益, 以下略去 (k), 即 P = P(k), X = X(k):
K = P C’ (C * P * C’ + R) -1
这里 R = E{ Vj^2 }, 是测量噪声的协方差(阵), 即系统框图中的 Vj 的协方差, 为了简化,也当作一个常数矩阵。由于我们的系统一般是单输入单输出,所以 R是一个 1x1的矩阵,即一个常数,上面的公式可以简化为:
K = P C’ / (C P * C’ + R) -
状态变量反馈的误差量:
e = Z(k) – C*X(k)
这里的 Z(k) 是带噪声的测量,在项目中,一维输入信号C=1 -
更新误差相关矩阵P
P = P – K * C * P -
更新状态变量:
X =X + Ke = X + K (Z(k) – C*X(k)) -
最后的输出:
Y = C*X
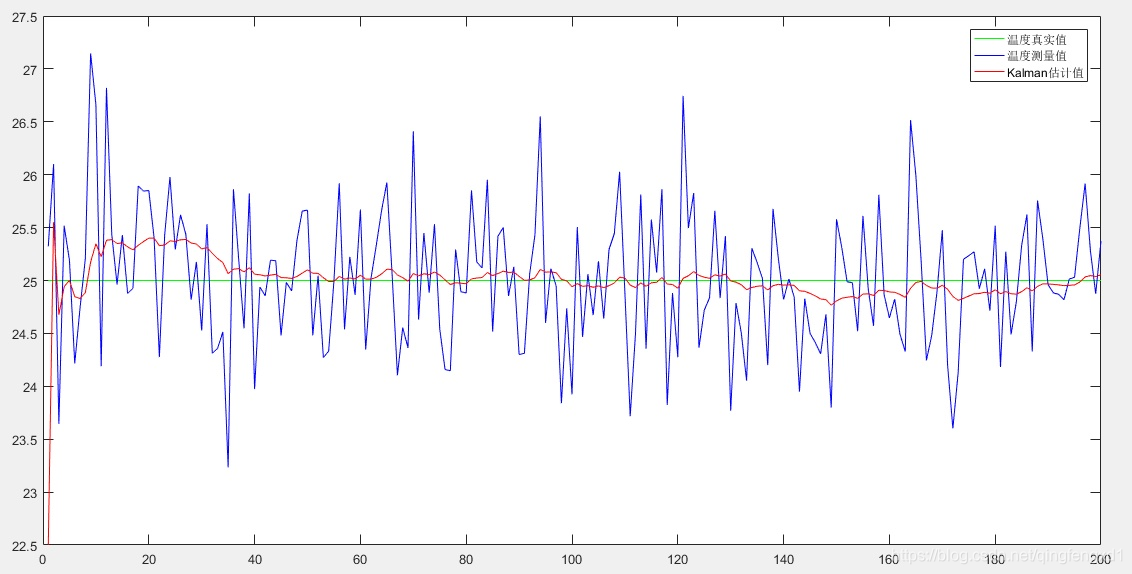
%卡尔曼滤波实例
%测量房间温度,房间温度真实值为T=25度,一共测量两百个点
N=200; T=25; size=[N,1];
%取温度预测值的方差为Q=1e-3,温度传感器的测量方差为R=0.36,即我们更相信预测值,而较少相信传感器测量值。
Q=1e-3; R=0.36; T_mearsured=T+sqrt(R)*randn(size);
%初始时刻温度的最优估计值为T_start=22.5度,温度初始估计方差为P_start=2
T_start=22.5; P_start=2;
T_kalman(1)=T_start; P_kalman(1)=P_start;
%用_kalman的后缀表示最优估计值,用_pre的后缀表示预测值
for k=2:N
%在进行温度预测时,因为温度是一个连续的状态,我们认为上一时刻的温度和当前时刻的温度相等,则有T(k)=T(k-1)。
T_pre(k)=T_kalman(k-1); % 估计时刻k 的状态
P_pre(k)=P_kalman(k-1)+Q; % 计算误差相关矩阵P, 度量估计值的精确程度
K(k)=P_pre(k)/(P_pre(k)+R); % 计算卡尔曼增益
T_kalman(k)=T_pre(k)+K(k)*(T_mearsured(k)-T_pre(k)); % 更新状态变量
P_kalman(k)=P_pre(k)-K(k)*P_pre(k); % 更新误差相关矩阵P
end
%画图
figure();
plot(T*ones(size),'g');
hold on
plot(T_mearsured,'b');
hold on
plot(T_kalman,'r');
legend('温度真实值','温度测量值','Kalman估计值')
在项目上,关键的是获取到Q、R、P,这3个数据需要通过实验统计获取,
拓展研究:
3、https://blog.csdn.net/zengxiantao1994/article/details/71170728
4、https://www.mathworks.com/help/fusion/ref/trackingkf.html
5、https://www.mathworks.com/help/fusion/ug/linear-kalman-filters.html
PS:🐧号 1762016542 提供答疑咨询等














 2204
2204











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









