







MM32 SPIN MCU 无感方波BLDC电机驱动原理篇 AN6301
BLDC 电机
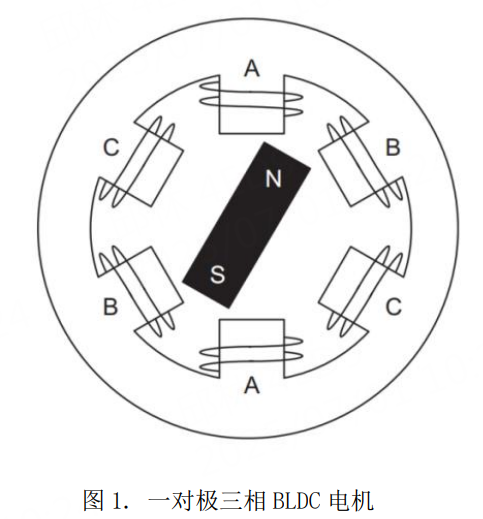
BLDCM 全称是 Brushless Direct Current Motor,即无刷直流电机,属于永磁式同步电机的一种,其转子表面贴装有永磁体,定子上有三相绕组。
永磁体生成转子磁通,而通电的定子绕组产生磁极。 转子(与一个条状磁体等效)被通电定子相位吸引。通过使用适当的序列来为定子相位供电,在定子上创建并保持了一个旋转磁场。转子的固有磁极跟随定子的旋转磁场有序旋转,以达到 BLDCM 正常运行的目的。
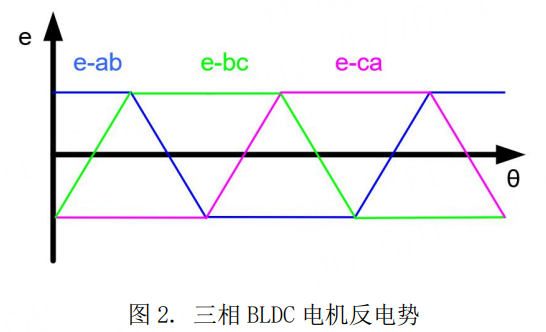
BLDC 电机的一个显著特征就是反电势特征为梯形波,如图2 所示。这就使得BLDC电机更适合于六步换相的控制方式,以此获得更大的输出扭矩。
BLDC驱动电路如下:
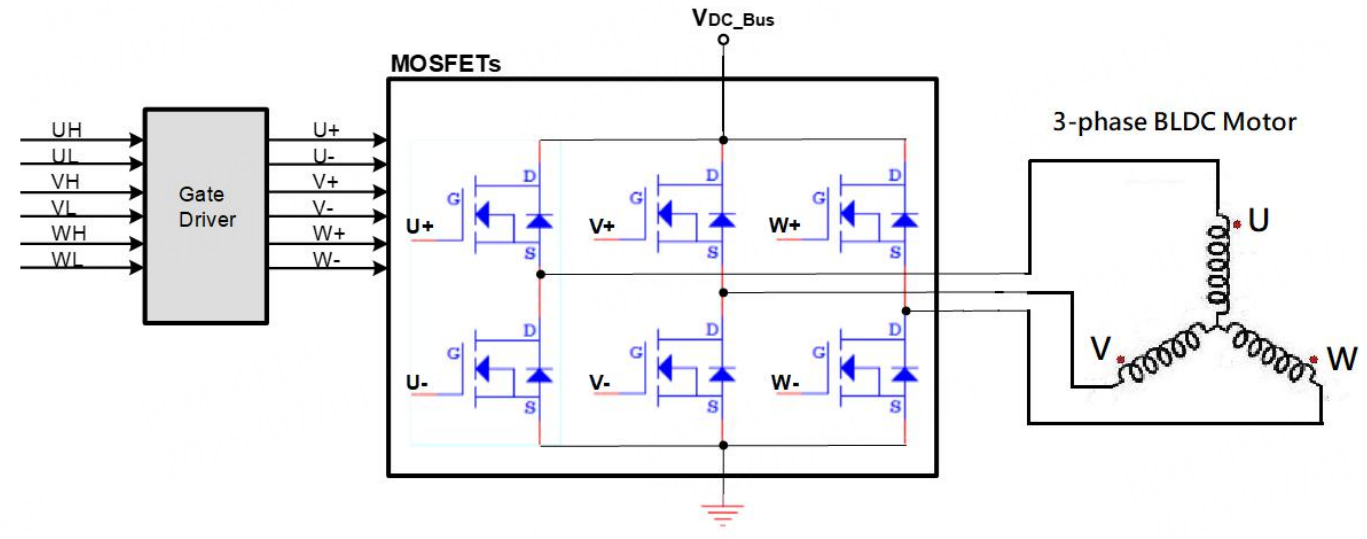
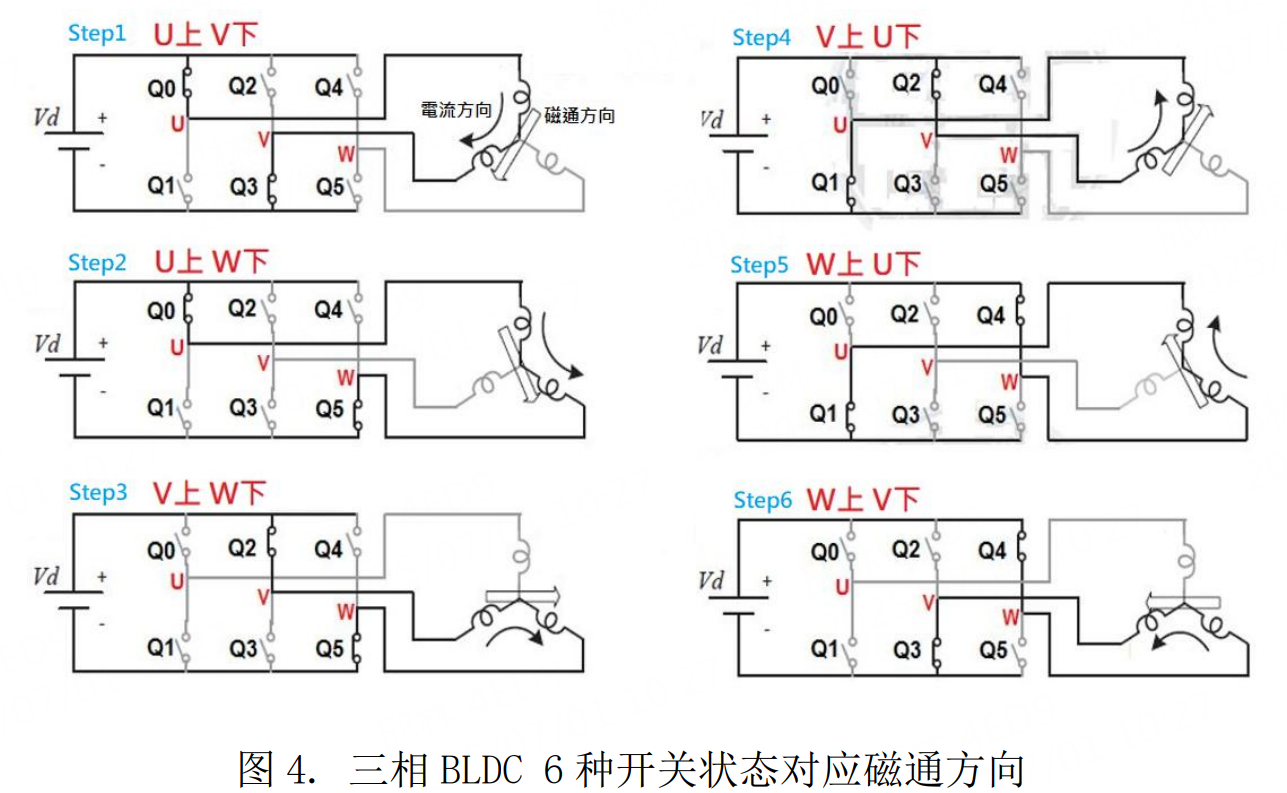
通过改变MOS管的开关状态,可以得到6种状态。
BLDC的转子是永磁体,改变绕组通电可以得到相差60度的电磁铁,依次切换就可以吸引转子一直旋转。

这就是六步换相的控制方式。
无位置传感器方式
无刷直流电机的控制策略主要可分为反电势法、续流二极管法、电感法、磁链函数法、定子三次谐波法等。其中,反电势法是应用最广,技术最成熟的方案。
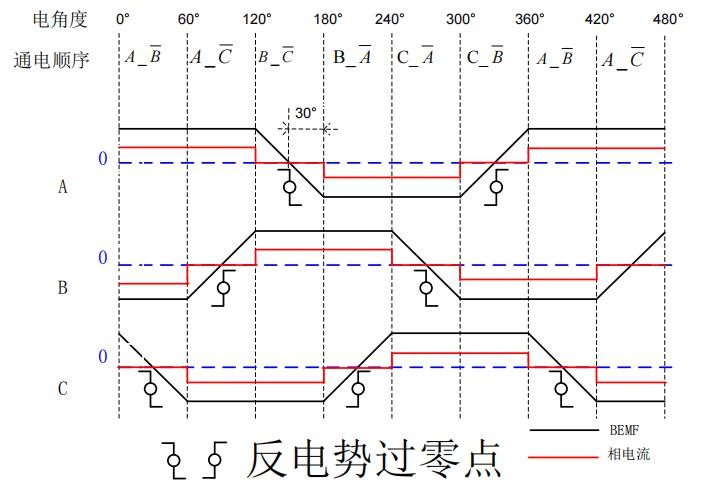
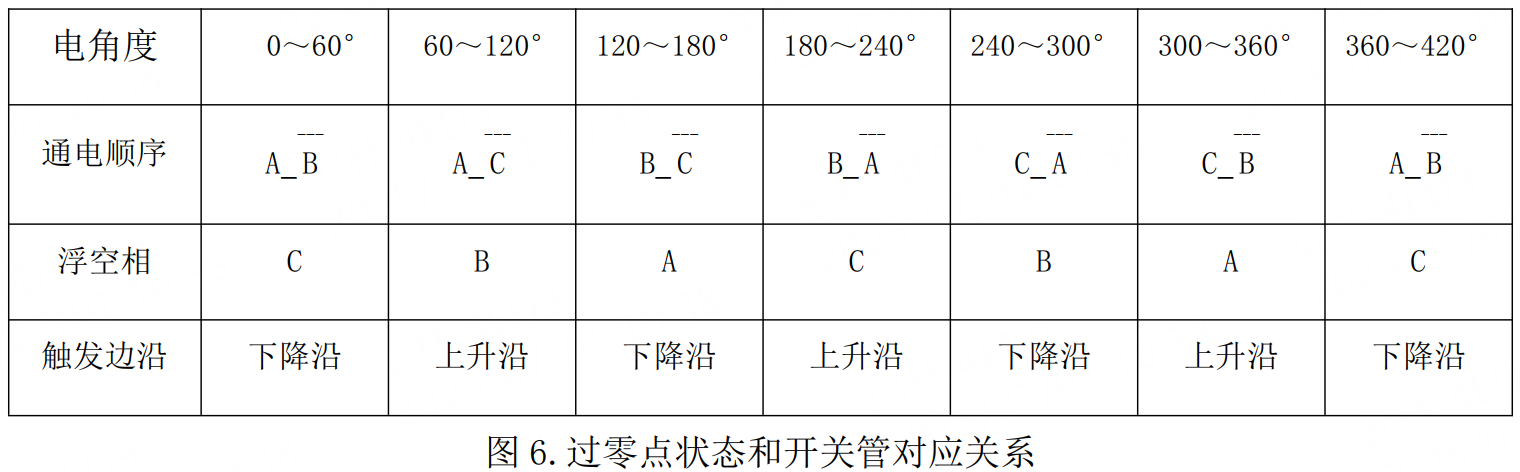
只要能检测各相绕组的反电势过零点,就能在一个电周期内得到转子六个关键位置。非导通相反电势过零点延时 30°电角度即为换相点。这种通过检测相绕组反电势过零点来实现无刷直流电机无传感器六步换相控制的算法就是反电势法。
反电势法检测简单的说就是通过检测非导通相的端电压,与无刷直流电机中性点电压进行比较。一般无刷直流电机中性点无法引出,且有些 PWM 调制方式下,中性点和电机端电压随着PWM 调制规律的脉动,因此需要特殊的处理方式来检测反电势过零点。目前反电动势过零点检测主要有以下三种方法:
- 在 PWM 开通时刻检测未导通相反电势,并将其和母线电压的一半进行比较找到过零点。这种方式仅适用于某些 PWM 调制方式。
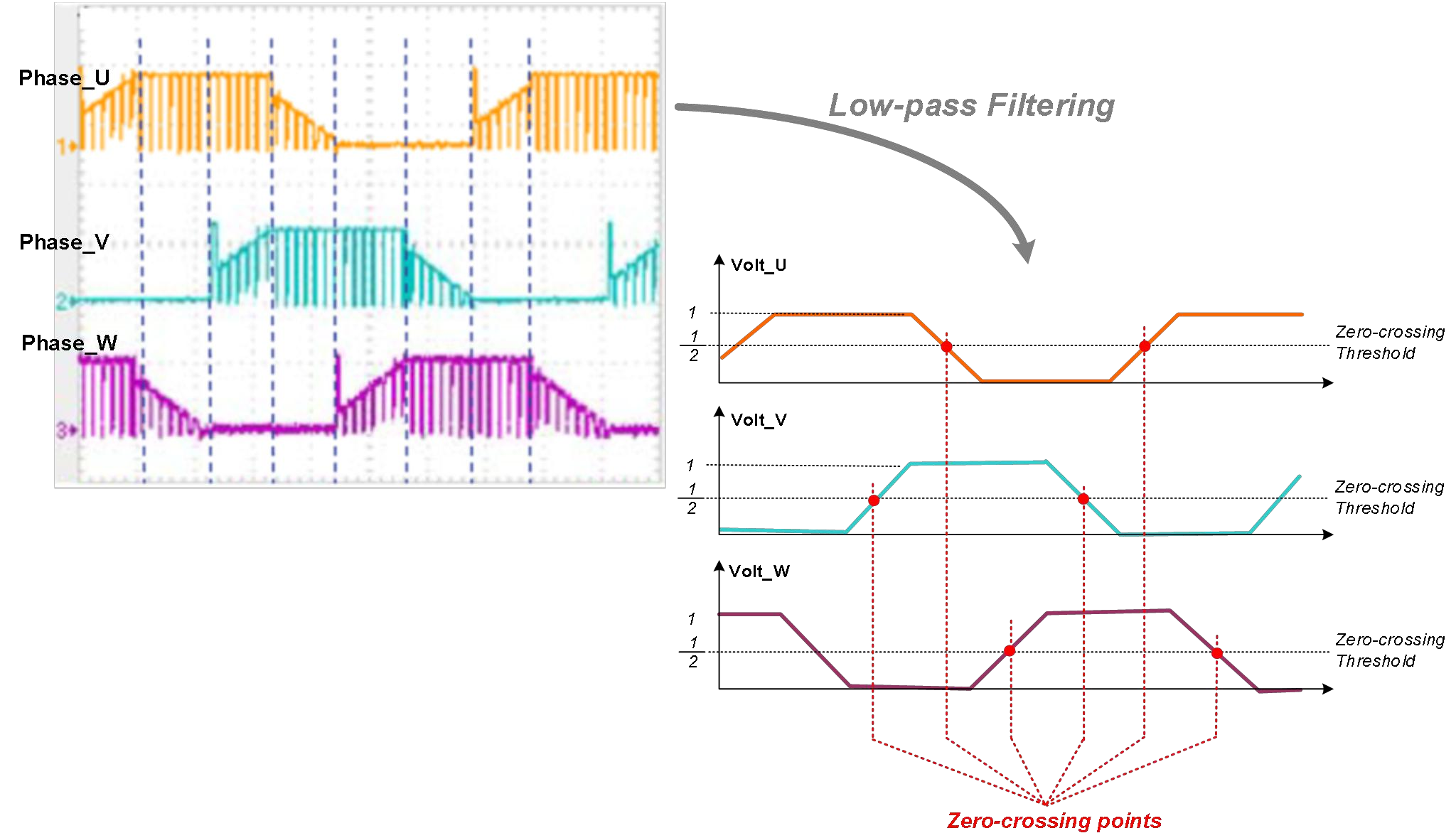
- 使用三相对称星型电阻网络构建虚拟中性点,对需要检测的电机端电压进行低通滤波,通过比较器比较找到过零点。这种方法原理和方法简单,不需要与PWM 调制进行同步,因此使用广泛。此方案因为对电机端电压进行了滤波,会导致相位延时,从而影响反电势过零点检测的精度,需要进行软件处理。
- 利用 ADC 采样将电机端电压转换为数字信号计算出来,与模拟中性点电压进行比较。此方案节省了模拟比较器的成本,但是对微控制器的ADC 采样精度和速度以及计算能力都有要求。电机转速较高时,会导致无法准确检测到过零点。
不管使用哪种方案,都需要特别注意规避掉换相续流对反电势检测带来的影响,避免续流导致过零点检测不准,从而导致换相失败。
过零点检测
ADC 采样检测过零点
过零点检测和延时换相
使用 MCU 的 ADC 来检测过零点之前,必须先对相电压做分压,再经过低通滤波, 获得低于5V 的电压。 判断过零点的阈值,则设置为该直流电压幅值的 1/2。 随着电机转速与负载的不同,该直流电压的幅值是会改变的.因此,过零点的阈值也随之在调整,这可由 MCU 实时采样并计算而得.示意图如下:
比较器检测过零点
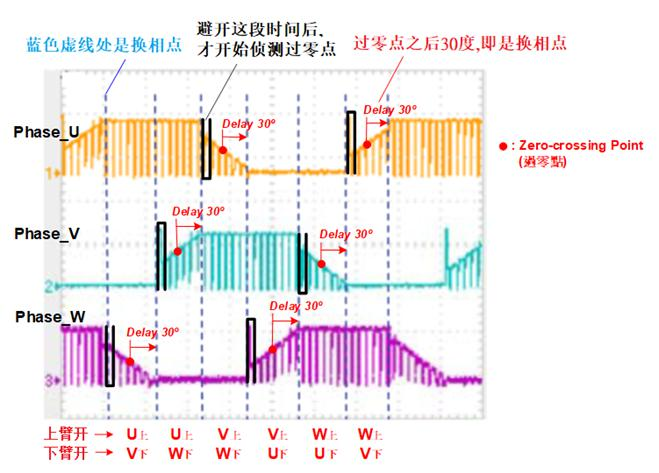
利用比较器将浮空相端电压和虚拟中性点信号进行比较, 可得到反电动势过零点信号, 其时序如下图所示。


















 4696
4696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











