






基本矩阵F/E在计算机视觉中是提纯匹配点、恢复相机位姿的一个法宝。但是它是如何得到的?下面笔者做其简单的推导
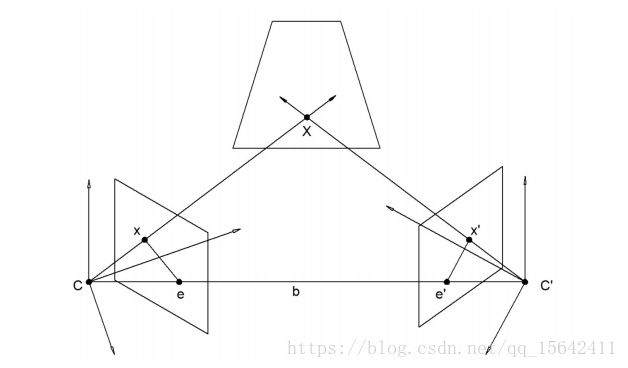
如图下图,两视几何图。其中C和C’分别代表左、右摄影中心,x和x’代表同名像点,e和e’代表极点。X是地物点,b 代表基线。
根据以前的博客内容可知,世界坐标系到图像坐标系要经过一个变换,即是x=PX,x’=P’X (1)。详情见
https://blog.csdn.net/qq_15642411/article/details/80246167
根据(1)联合可得x’=P’P+ x,其中P+ 代表P的伪逆(P和P’都是3*4的矩阵)
右像的极点为:e’=P’C ,其中C是左像的摄影中心,因为计算机视觉中,转角系统是先旋转再平移,所以计算得到平移向量并不是摄影中心位置,但是可以根据R和T计算得到C。
即是 C=-transpose(R)*T ;R是3*3旋转矩阵,T是3*1的vector.
根据右极点和右像点可以确定其右极线(核线):
l’=e’×x’= P’C×P’P+ x
而向量的叉乘可以写成如下形式
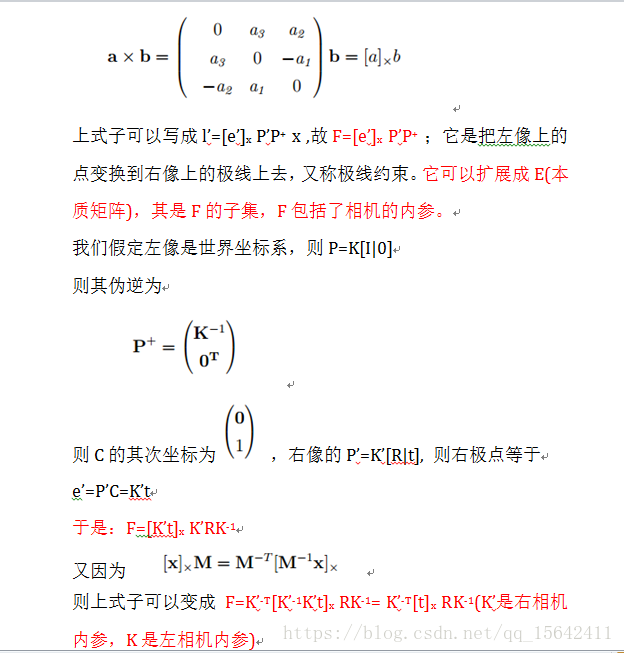
由此可见E=[t]xR,因此,若是知道相机外参,E可以计算得到,其实E本质矩阵相当于相对定向,故我们恢复位姿时候,从E着手,使用SVD算法得到R和T。
E本质矩阵,5点就可以计算得到,它比F约束能力更强,若是知道相机内参,可以尝试用E来提纯匹配点。
参考文献:
1、Implementation of bundle block adjustment method for determination of exterior orientation into GRASS GIS
基本矩阵F和本质矩阵E的详细推导
最新推荐文章于 2022-06-28 00:32:29 发布















 1354
1354











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









