










前言
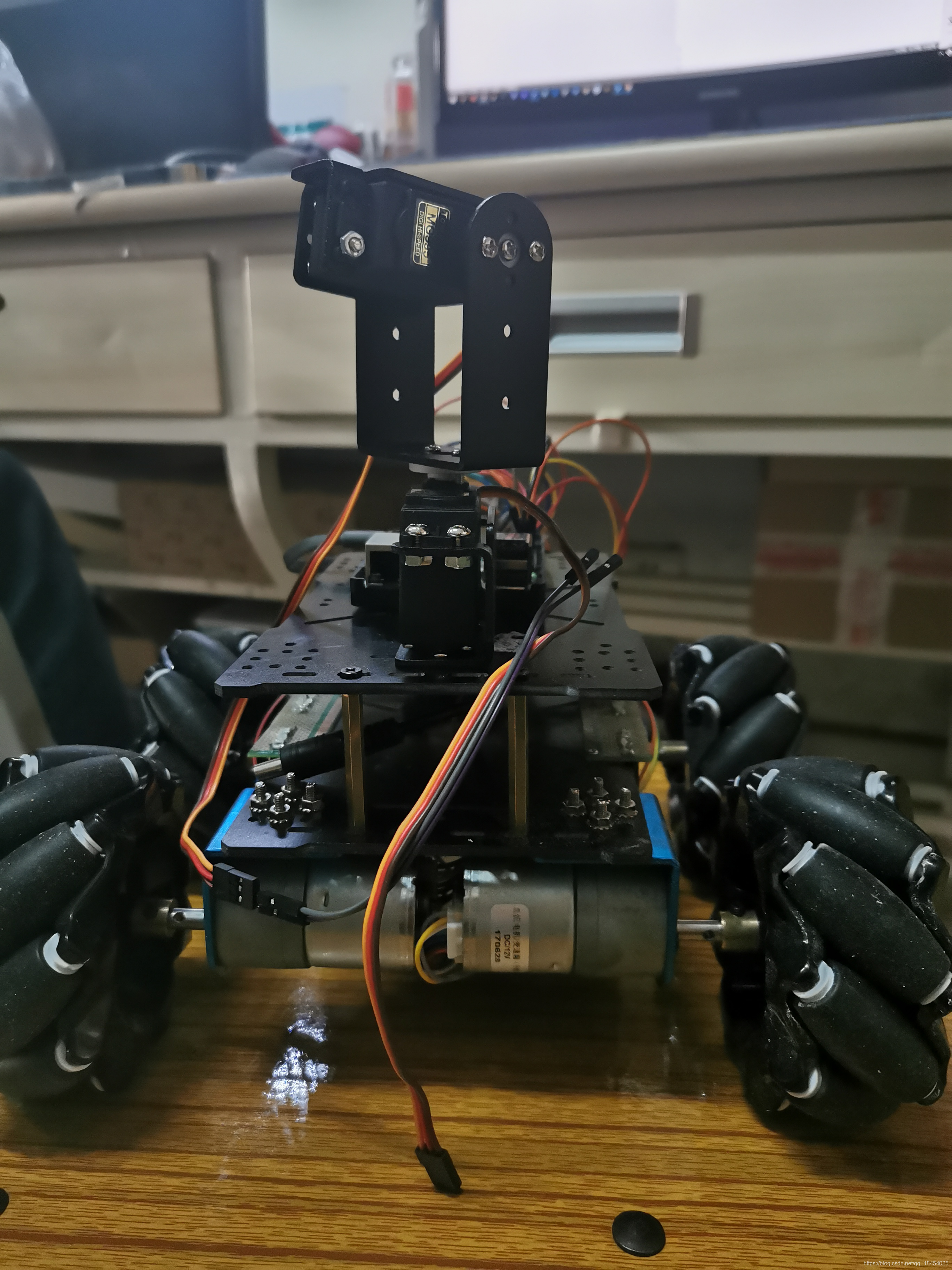
上一篇文章介绍了我们需要准备什么东西。具体的组装我就不在多介绍了,这是我组装好的样子。
 原件购买的话可以先在闲鱼逛一逛,一些学长毕业以后会把自己用完的东西挂在那里。
原件购买的话可以先在闲鱼逛一逛,一些学长毕业以后会把自己用完的东西挂在那里。

这是水弹枪的样子,淘宝有卖的,很多部件是3D打印的,如果你有打印机的话,可以找找模型自己打印。只要通电就可以连续发射水弹,通电时电流很大,所以我们需要用一个继电器来控制这个水弹枪。当然这都是后话了,我们首要任务是先让小车跑起来,然后再去添加这些花里胡哨的功能。
代码
为了更简单,我用了Flask框架做服务端。为了让代码更易懂。用面向对象的概念,把轮子类实现。
import RPi.GPIO as GPIO
SPEED = 50 #用来控制速度,pwm占空比
FREQUENCY = 6000 #pwm频率
CW = 1
CCW = 0
class Wheel:
def __init__(self, speed_pin, direction_pin,isStop_pin):
self.pin_speed = speed_pin
self.pin_direction = direction_pin
self.pin_isStop = isStop_pin
self.isStop = True
self.speed = SPEED
self.direction = CW
GPIO.setup(self.pin_speed,GPIO.OUT)
GPIO.setup(self.pin_direction, GPIO.OUT)
GPIO.setup(self.pin_isStop, GPIO.OUT)
GPIO.output(self.pin_isStop, False)
self.pwm = GPIO.PWM(self.pin_speed,FREQUENCY)
self.pwm.start(SPEED)
def stop(self):
GPIO.output(self.pin_isStop,False)
self.isStop = True
def cw(self):
GPIO.output(self.pin_isStop, True)
GPIO.output(self.pin_direction,True)
self.direction = CW
self.isStop = False
def ccw(self):
GPIO.output(self.pin_isStop,True)
GPIO.output(self.pin_direction,False)
self.direction = CCW
self.isStop = False
进而,我们一个小车有四个轮子,可以实现小车类
from wheel import Wheel
import RPi.GPIO as GPIO
import wheel
#0:speed 1:direction 2:stop
class Car:
def __init__(self,FrL_,FrR_,BeL_,BeR_):
GPIO.setmode(GPIO.BOARD)
self.wheelFrL = Wheel(FrL_[0],FrL_[1],FrL_[2])
self.wheelFrR = Wheel(FrR_[0],FrR_[1],FrR_[2])
self.wheelBeL = Wheel(BeL_[0],BeL_[1],BeL_[2])
self.wheelBeR = Wheel(BeR_[0],BeR_[1],BeR_[2])
def moveFront(self): #小车向前移动
self.wheelFrL.ccw() #左前轮逆时针
self.wheelBeR.cw() #右后轮顺时针
self.wheelBeL.ccw() #左后轮逆时针
self.wheelFrR.cw() #右前轮顺时针
def moveBehind(self):
self.wheelFrL.cw()
self.wheelBeR.ccw()
self.wheelBeL.cw()
self.wheelFrR.ccw()
#
完整代码以后会打包贴出来,这里注意麦克纳姆轮的安装方式,我采用的是米字安装,每个电机互相配合,小车整体就会做出相应的动作。
最后要实现服务端,顺便把要显示摄像头实时画面的部分完成:
from flask import Flask
from flask import Flask, render_template, Response
import cv2
from car import Car
FrL=[7,11,13] # red blue yellow 每个轮子的三条信号线要接的引脚号
FrR=[15,29,31]
BeL=[33,35,37]
BeR=[12,16,18]
class VideoCamera(object):
def __init__(self):
self.cap = cv2.VideoCapture(0)
def __del__(self):
self.cap.release()
def get_frame(self):
success, image = self.cap.read()
ret, jpeg = cv2.imencode('.jpg', image)
return jpeg.tobytes()
app = Flask(__name__)
@app.route('/')
def hello_world():
return render_template('index.html')
def gen(camera):
while True:
frame = camera.get_frame()
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + frame + b'\r\n\r\n')
@app.route('/video_feed')
def video_feed():
return Response(gen(VideoCamera()), mimetype='multipart/x-mixed-replace; boundary=frame')
@app.route('/front')
def front():
car.moveFront()
print('front') #just for debug
return 'ok'
@app.route('/behind')
def behind():
car.moveBehind()
print('behind')
return 'ok'
@app.route('/left')
#完整代码不贴了
# @app.route('/cameraLeft') #摄像头云台移动 还未完善
# @app.route('/cameraRight')
# @app.route('/cameraUp')
# @app.route('/cameraDown')
if __name__ == '__main__':
car = Car(FrL,FrR,BeL,BeR) #实例化一个小车
app.run()
结语
这样,在网页上可以控制小车的移动了,而且能够看到摄像头的实时画面。
自己动手做一个机甲大师 S1














 1672
1672











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









