






六种人体姿态估计的深度学习模型和代码,详情可参考链接
四款人体姿势关键点估计论文链接
openpose下载可参考链接安装与调试可参考链接(亲测有效)
这里整理一下论文Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields的原理。
Introduction
论文首先指出了Pose Estimation的三个关键性挑战:首先,每一个的图像可能包含未知数量的人,他们可能出现在图像的任何位置,大小也不一定;其次,例如相互接触、遮挡等都使得对关键点的关联更加困难。还有,随着图像中人的数量增加,程序的运行时间复杂度也会上升,这使得实时监测的表现成为一个挑战。然后论文中指出了现有的一些方法存在的问题:现有的一些方法主要由person detector和single-person pose estimation两部分组成,就是给定一张图片,先做人体的检测,在每个人的位置上都得到一个边缘方框信息,在每个方框上,做单人的人体姿态估计,重复这个步骤,直到得到最终的结果。这些top-down的方法在性能上很依赖于人体姿态检测的结果,如果person detector检测失败了(当多个人挨得很近的时候),这些方法可能就不奏效了。另外一个就是时间的问题,算法速度与图片上人的数目成正比,假如说一张图有30个人,它要重复30次单人的人体估计,这样使得这个方法在复杂场景下变得十分缓慢。
Method
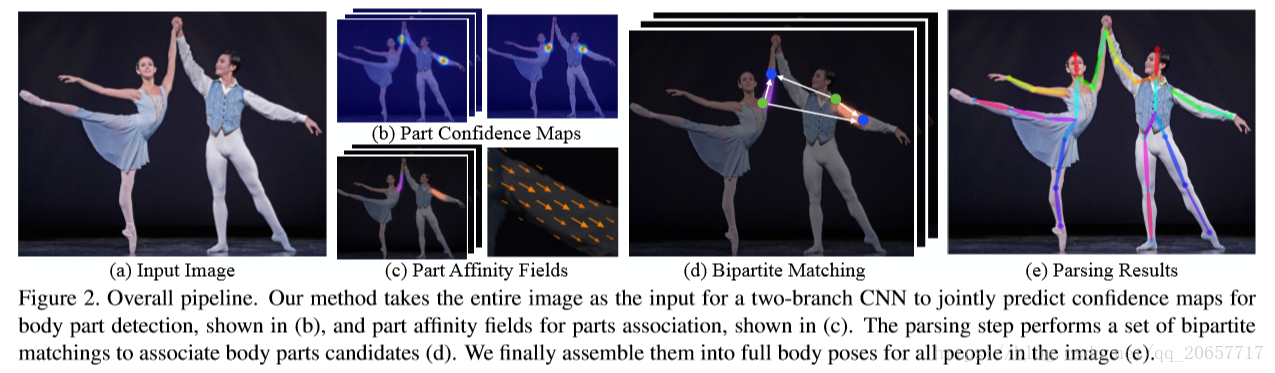
文章的核心是提出一种利用Part Affinity Fields(PAFs)的自下而上的人体姿态估计算法。研究自下而上算法(得到关键点位置再获得骨架)而不是自上而下算法(先检测人,再回归关键点)。首先检测人关键点的位置,比如图片上人体右肩膀的位置,得到检测结果是通过预测人体关键点的热点图,可以看到在每个人体关键点上都有一个高斯的峰值,代表神经网络相信这里有一个人体的关键点。同样的我们对其他人体关键点比如说右手肘作同样的处理,得到这个检测结果。在得到检测结果之后,对关键点检测结果进行连接,换句话说,就是想知道每个关键点具体是属于图片中哪个人。
对于这个步骤,他们的方法是通过一个新的特征进行推测,这个特征是一个矢量场,叫作人体关键点亲和场(PAFs),在后面会具体介绍这个特征的表示,这里先整体介绍方法的结构。然后重复这个步骤,对另外关键点之间(另外人体的躯干)的连接进行推测,同样是通过人体关键点亲和场来进行推测,重复这个步骤,直到得到人体的全部骨架信息。
执行过程如下图所示,一张输入图像w*h,然后模型同时得到人体部位位置的confidence maps集合S和一个用来说明关节点关联的part affinities集合L。得到一张图像中所有人的2D关键点,他们的创新点就是设计了一个设计了一个深度学习网络结构,同时学习人体关键点的检测和人体关键点的连接。并且,同时学习会使得他们互相帮助,得到更好的结果。
Simultaneous Detection and Association
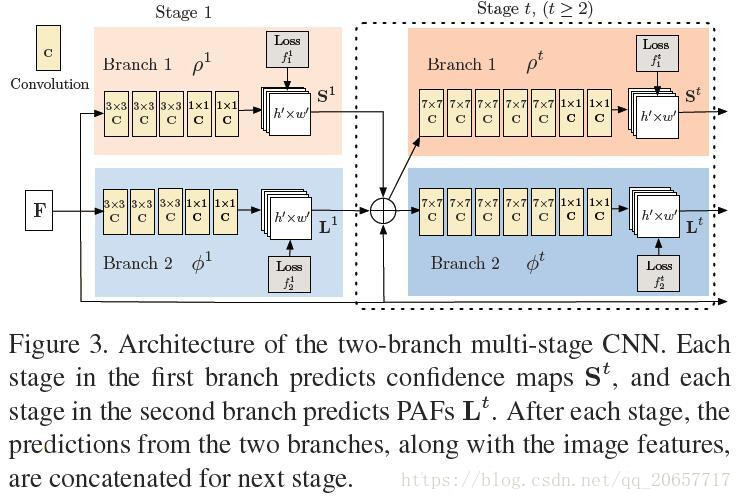
PAFs是用来描述像素点在骨架中的走向,用L(p)表示;关键点的响应用S(p)表示。先看主体网络结构,图像首先被一个卷积神经网络处理后生成特征图集F(通过VGG-19的前10层进行初始化并微调)网络采用VGG pre-train network作为骨架,有两个分支分别回归L(p)和S(p)。每一个stage算一次loss,之后把L和S以及原始输入concatenate,继续下一个stage的训练。随着迭代次数的增加,S能够一定程度上区分结构的左右。loss用的L2范数,S和L的ground-truth需要从标注的关键点生成,如果某个关键点在标注中有缺失则不计算该点。记为F,经过如图所示的网络,该网络分上下两个分支,每个分支都有t个阶段(表示越来越精细),每个阶段都会将feature maps进行融合。其中ρ φ 表示网络。
Confidence Maps for Part Detection
下边给出根据标注数据计算groundtruth confidence maps S∗的方法,每个confidence map都是一个2D表示。理想情况下,当图像中只包含一个人时,如果一个关键点是可见的话对应的confidence map中只有一个峰值;当图像中有多个人时,对于每一个人k的每一个可见关键点j在对应的confidence map中都会有一个峰值。首先给出每一个人k的单个confidence maps,
xj,k∈ℝ2
x
j
,
k
∈
R
2
表示图像中人k对应的位置j对应的groundtruth position,数值如公式(6)所示,其中σ用来控制峰值在confidence map中的传播范围。对应多个人的confidence map见公式(7),这里用最大值而不是平均值能够更准确地将同一个confidence map中的峰值保存下来。
S∗j,k(p)=exp(−|p−xj,k|22σ2),(6)
S
j
,
k
∗
(
p
)
=
e
x
p
(
−
|
p
−
x
j
,
k
|
2
2
σ
2
)
,
(
6
)
S∗j(p)=maxkS∗j,k(p),(7)
S
j
∗
(
p
)
=
max
k
S
j
,
k
∗
(
p
)
,
(
7
)
Part Affinity Fields for Part Association
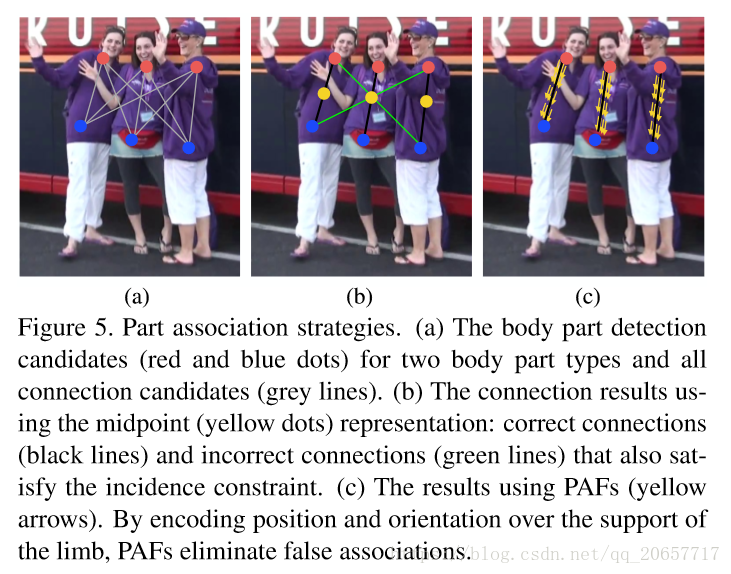
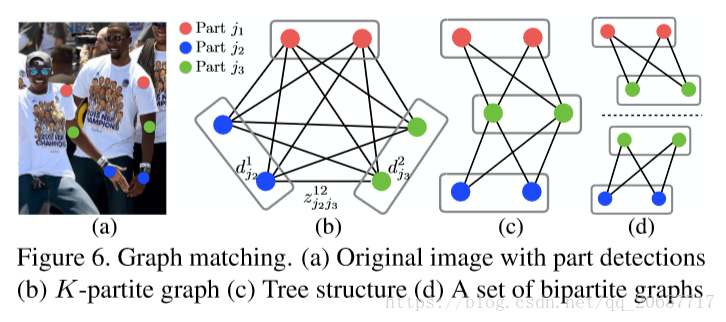
给定一组关键点,如Figure 5(a)所示,我们如何把它们组装成未知数量的人的整个身体的pose呢?我们需要一个置信方法来确定每队关键点之间的连接,即它们属于同一个人。一个可能的方法是找到一个位于每一对关键点之间的一个中间点,后检查中间点是真正的中间点的概率,如Figure 5(b)所示。但是当人们挤在一块儿的时候,通过这样的中间点可能得出错误的连接线,如Figure 5(b)中绿线所示。出现这种情况的原因有两个:(1)这种方式只编码了位置信息,而没有方向;(2)躯体的支撑区域已经缩小到一个点上。为了解决这些限制,我们提出了称为part affinity fields的特征表示来保存躯体的支撑区域的位置信息和方向信息,如Figure 5(c)所示。对于每一条躯干来说,the part affinity是一个2D的向量区域。在属于一个躯干上的每一个像素都对应一个2D的向量,这个向量表示躯干上从一个关键点到另一个关键点的方向。特别的,对两个候选部分位置我们沿着线段对预测部分亲和域Lc进行取样,来测量它们联系的置信度。
考虑下图中给出的一个躯干(手臂),令
Xj1,k
X
j
1
,
k
和
xj2,k
x
j
2
,
k
表示图中的某个人k的两个关键点
j1
j
1
和
j2
j
2
对应的真实像素点,如果一个像素点p位于这个躯干上,值
L∗c,k(p)
L
c
,
k
∗
(
p
)
表示一个从关键点
j1
j
1
到关键点
j2
j
2
的单位向量,对于不在躯干上的像素点对应的向量则是零向量。下面这个公式给出了the groundtruth part affinity vector,对于图像中的一个点p其值
L∗c,k(p)
L
c
,
k
∗
(
p
)
的值如下:

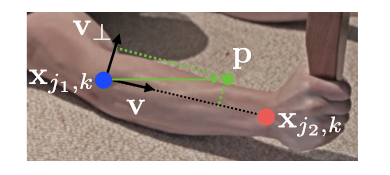
其中,
v=(xj2,k−xj1,k)/|xj2,k−xj1,k|2
v
=
(
x
j
2
,
k
−
x
j
1
,
k
)
/
|
x
j
2
,
k
−
x
j
1
,
k
|
2
表示这个躯干对应的单位方向向量。属于这个躯干上的像素点满足下面的不等式,其中
σl
σ
l
表示像素点之间的距离,躯干长度为
lc,k=|xj2,k−xj1,k|2
l
c
,
k
=
|
x
j
2
,
k
−
x
j
1
,
k
|
2
,
v⊥
v
⊥
表示垂直于v的向量。
0≤v⋅(p−xj1,k)≤lc,kand|v⊥⋅(p−xj1,k)|≤σl 0 ≤ v ⋅ ( p − x j 1 , k ) ≤ l c , k a n d | v ⊥ ⋅ ( p − x j 1 , k ) | ≤ σ l
整张图像的the groundtruth part affinity field取图像中所有人对应的affinity field的平均值,其中 nc(p) n c ( p ) 是图像中k个人在像素点p对应的非零向量的个数。
L∗c(p)=1nc(p)∑kL∗c,k(p)(9) L c ∗ ( p ) = 1 n c ( p ) ∑ k L c , k ∗ ( p ) ( 9 )
在预测的时候,我们用候选关键点对之间的PAF来衡量这个关键点对是不是属于同一个人。具体地,对于两个候选关键点对应的像素点 dj1 d j 1 和 dj2 d j 2 ,我们去计算这个PAF,如下式所示。
E=∫u=1u=0Lc(p(u))⋅dj2−dj1|dj2−dj1|2du(10) E = ∫ u = 0 u = 1 L c ( p ( u ) ) ⋅ d j 2 − d j 1 | d j 2 − d j 1 | 2 d u ( 10 )
其中,p(u)表示两个像素点 dj1 d j 1 和 dj2 d j 2 之间的像素点:
p(u)=(1−u)dj1+udj2(11) p ( u ) = ( 1 − u ) d j 1 + u d j 2 ( 11 )
MultiPerson Parsing using PAFs
借助非最大抑制,我们从预测出的confidence maps得到一组离散的关键点候选位置。因为图像中可能有多个人或者存在false positive,每个关键点可能会有多个候选位置,因此也就组成了很大数量的关键点对,如Figure 6(b)所示。按照公式(10),我们给每一个候选关键点对计算一个分数。从这些关键点对中找到最优结果,是一个NP-Hard问题。下面给出本文的方法。
假定模型得到的所有候选关键点构成集合
DJ={dmj:forj∈{1...J},m∈{1...Nj}}
D
J
=
{
d
j
m
:
f
o
r
j
∈
{
1...
J
}
,
m
∈
{
1...
N
j
}
}
,其中
Nj
N
j
表示关键点j的候选位置数量,
dmj∈ℝ2
d
j
m
∈
R
2
是关键点j的第m个候选位置的像素坐标。我们需要做的是将属于同一个人的关键点连成躯干(胳膊,腿等),为此我们定义变量
zmnj1j11∈{0,1}
z
j
1
j
1
1
m
n
∈
{
0
,
1
}
表示候选关键
dmj1
d
j
1
m
和
dmj2
d
j
2
m
是否可以连起来。如此以来便得到了集合
Z={zmnj1j2:forj1,j2∈{1...J},m∈{1...Nj1},n∈{1...Nj2}}
Z
=
{
z
j
1
j
2
m
n
:
f
o
r
j
1
,
j
2
∈
{
1...
J
}
,
m
∈
{
1...
N
j
1
}
,
n
∈
{
1...
N
j
2
}
}
。现在单独考虑第c个躯干如脖子,其对应的两个关键点应该是
j1
j
1
和
j2
j
2
,这两个关键点对应的候选集合分别是
Dj1
D
j
1
和
Dj2
D
j
2
,我们的目标如下所示。
maxZcEc=maxZc∑m∈Dj1∑n∈Dj2Emn⋅zmnj1j2,(12)
max
Z
c
E
c
=
max
Z
c
∑
m
∈
D
j
1
∑
n
∈
D
j
2
E
m
n
⋅
z
j
1
j
2
m
n
,
(
12
)
s.t.∀m∈Dj1,∑n∈Dj2zmnj1j2≤1,(13)
s
.
t
.
∀
m
∈
D
j
1
,
∑
n
∈
D
j
2
z
j
1
j
2
m
n
≤
1
,
(
13
)
∀n∈Dj2,∑m∈Dj1zmnj1j2≤1,(14)
∀
n
∈
D
j
2
,
∑
m
∈
D
j
1
z
j
1
j
2
m
n
≤
1
,
(
14
)
其中,
Ec
E
c
表示躯干c对应的权值总和,
Zc
Z
c
是躯干c对应的Z的子集,
Emn
E
m
n
是关键点
dmj1
d
j
1
m
和
dmj2
d
j
2
m
对应的part affinity,公式(13)和公式(14)限制了任意两个相同类型的躯干(例如两个脖子)不会共享关键点。问题扩展到所有C个躯干上,我们优化目标就变成了公式(15)。
maxZE=∑Cc=1maxZcEc,(15) max Z E = ∑ c = 1 C max Z c E c , ( 15 )
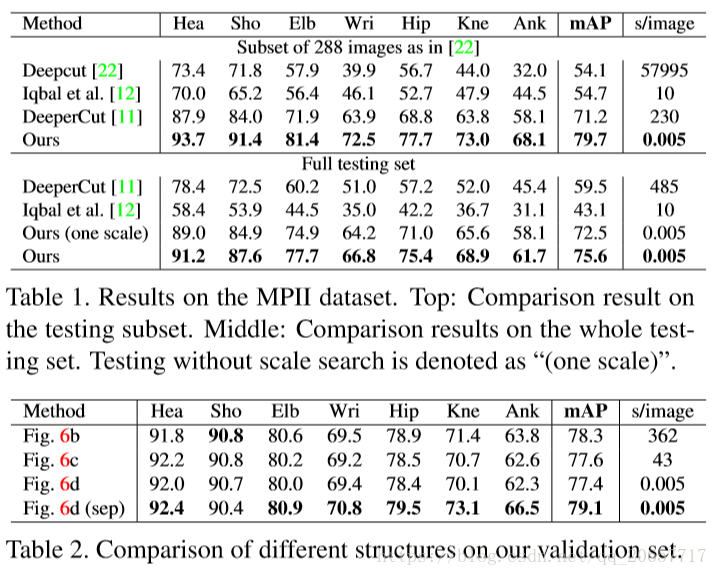
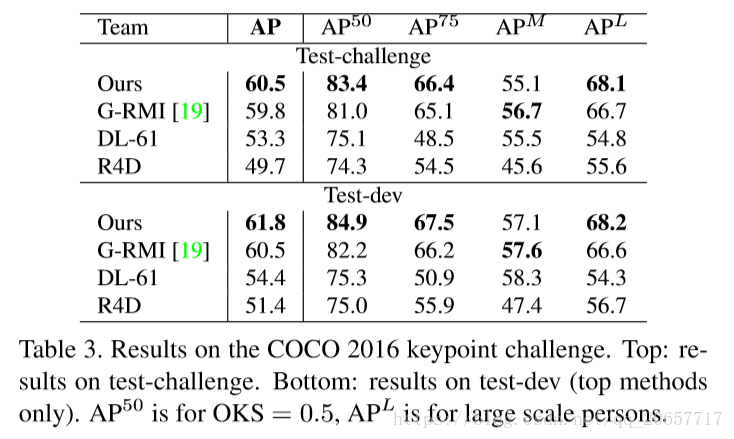
Results
至此,整个模型就说完了,下面是模型在COCO 2016和MPII两个数据集上多的结果。在预测的时候,论文中使用了同一张图像的3个尺寸(×0.7,×\1,×1.3)输入进去来得到比单个尺寸更好的结果。
参考自博客:https://blog.csdn.net/MajorDong100/article/details/78944982














 331
331











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









