






前言
图神经网络(GNN)是一类基于深度学习的处理图域信息的方法。由于其较好的性能与可解释性,GNN最近已成为一种广泛应用的图分析方法。真实的云服务系统中,海量机器各种时序指标相互关联彼此影响,构成了一个庞大的关系网络。如何应用GNN这一最新技术进行云系统的异常检测与故障分析呢?最近来自人工智能领域国际顶级学术期刊TNNLS的一篇论文:A Spatiotemporal Deep Learning Approach for Unsupervised Anomaly Detection in Cloud Systems 提出了一个方案。
TNNLS,全称为IEEE Transactions on Neural Networks and learning systems,是人工智能领域的国际顶级期刊,被列举为中科院SCI期刊1区,中国计算机协会推荐为B类,引用因子为7.982。
本次文章就和大家分享一下这边研究所带来的方案。
原文地址:https://ieeexplore.ieee.org/document/9228885/
数据集:https://github.com/QAZASDEDC/TopoMAD
背景与动机
解决的问题场景:大规模云系统的中的异常检测问题。
引入GNN的角度:
考虑单一的Metirc可以提供单个层面级别的信息,而考虑组件的多种Metric可以提供组件级别的信息。
各组成部分的相互作用关系。
拓扑信息的输入和组件级的输入构成了系统级的信息,可以更全面地了解整个运行系统。
传统DNN方法的弊端:
在决定组件是否处于异常状态时,有时需要考虑其连接的组件(一般DNN做不到)。
随着云系统复杂性的增加,为每个组件训练和维护单个模型的难度将越来越大。(尤其在微服务场景中,指标的数量成指数级增长,及其难维护)。
粗略地将整个系统看作一个笨重的组件会失去对其内部拓扑结构的洞察,从而可能增加对其正常行为建模的难度。
01
Motivation
增加拓扑信息的好处:
图神经网络的特征提取器共享于来自不同组件的同类指标之间,有助于在统一的特征学习下捕获相同指标类型之间的相似模式。
端到端的引入拓扑的影响。
拓扑信息可以引导模型将注意力集中在现实中具有直接连接和交互的组件上,这有助于防止模型的过拟合(GAT)。
引入了无监督选择检测阈值的方法:
过去的方法,类似DAGMM等,需要大量的阈值调参。在这里本论文引入无监督的模型来生成阈值,从而减少模型的调参难度。
数据处理
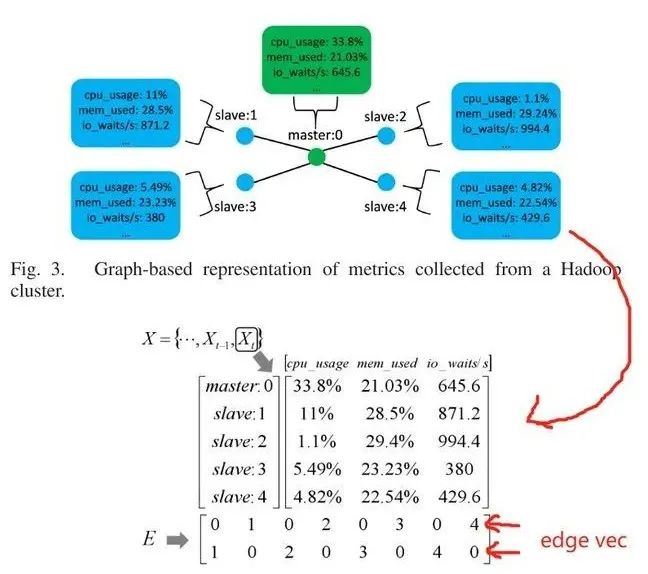
图 | 数据的处理与表示方式
数据分为两类:
为指标矩阵,横坐标是节点(Node),纵坐标是指标(Metric)。
为连接矩阵,主要是edge的向量矩阵,每个edge为
模型设计
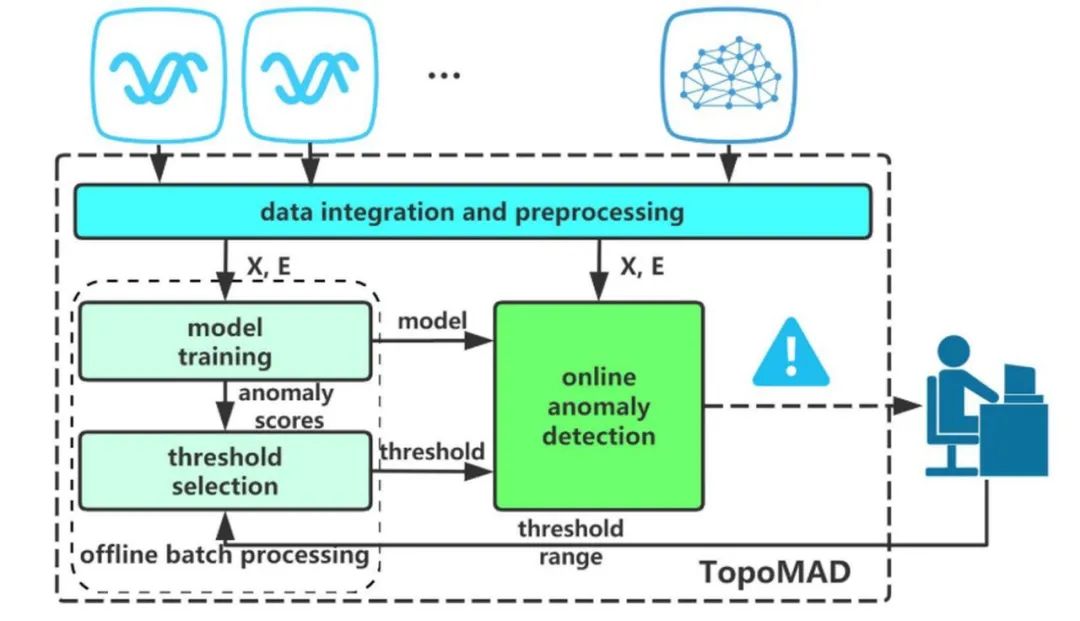
图 | 模型总体设计
模型在VAE和seq2seq的基础上进行设计:
VAE因为其生成模型的特点,常作为异常检测的方法(生成模型能估计联合概率密度)。
Seq2Seq结构出自NLP领域,常用于序列建模,这也跟我们要处理的时间序列不谋而合。
在这两个模型的基础上,引入Graph 网络对拓扑信息进行学习。
01
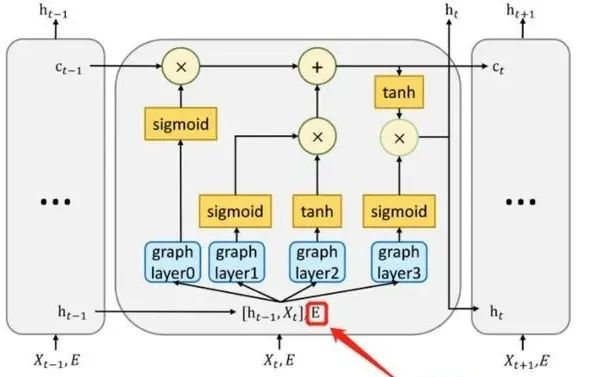
Graph-LSTM
GraphLSTM的主要思路是将LSTM中的全连接网络之前增加一个GNN,对拓扑信息和指标信息进行融合。
下面是两种LSTM的比较
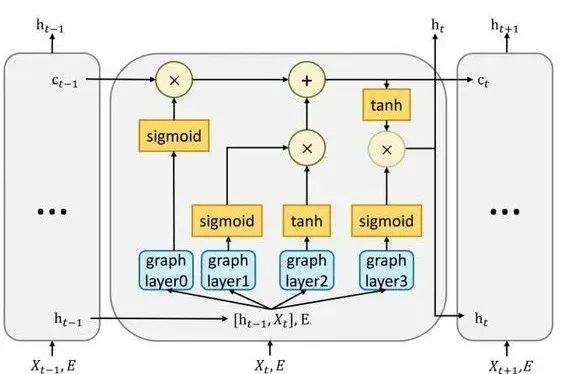
Graph-LSTM unit
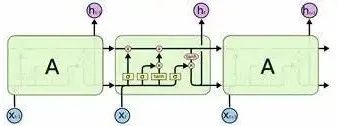
Origin LSTM unit
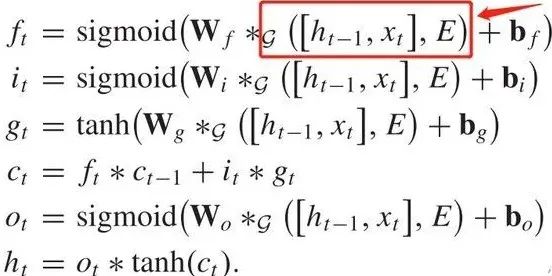
GraphLSTM 的公式
红框部分是由标准的LSTM中的 替换为
, 也就在之前添加了GNN作为拓扑信息和Metric信息的融合层,融合之后作为标准LSTM的输入。
02
TopoMAD
之后论文提出了由GraphLSTM单元组成的Seq2Seq+VAE 的模型。在训练和推理阶段的结构如下图:
训练阶段:
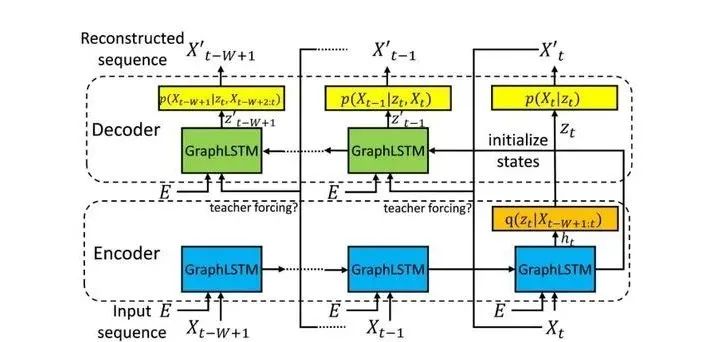
推理阶段:
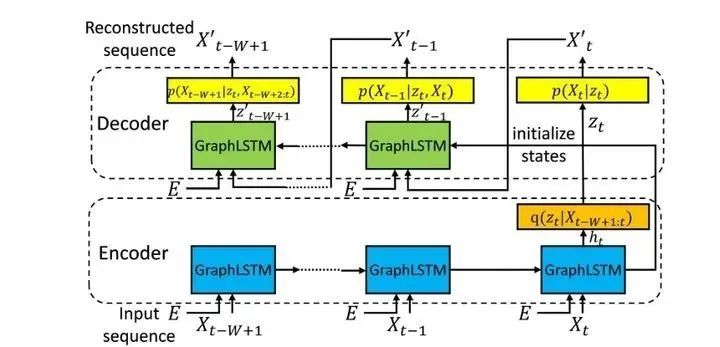
训练的时候decoder有 的可能用原始输入
、
使用重构后的值
。(scheduled sampling process)
初始化的时候
之后当val loss不减少的时候,
减半。
Loss 采用VAE的ELBO Loss结构:
03
计算异常得分
使用重构误差做为异常得分的计算:这种思想源于《Variational Autoencoder based Anomaly Detection using Reconstruction Probability》。其中  是采样数量,
是采样数量, 是计算或更新一个异常分数的次数(the tolerance of detection delay)。
但是在某些情况下,在某些情况下,系统中某个特定组件的相对较低的重构概率就足让我们将其判断为异常。因此,我们还从组件角度计算异常分数,如下所示:
也就是组件级别的异常。
02
阈值的选择
本文提出的阈值选择一种阈值选择方法,假设正常数据的异常分数位于密度较高的区域,异常数据的异常分数位于密度较低的区域。
基于这一假设,选择一个阈值,使该阈值从训练数据集中切割出的两个集合与一个算子提供的范围之间的距离最大化。
实验结果
01
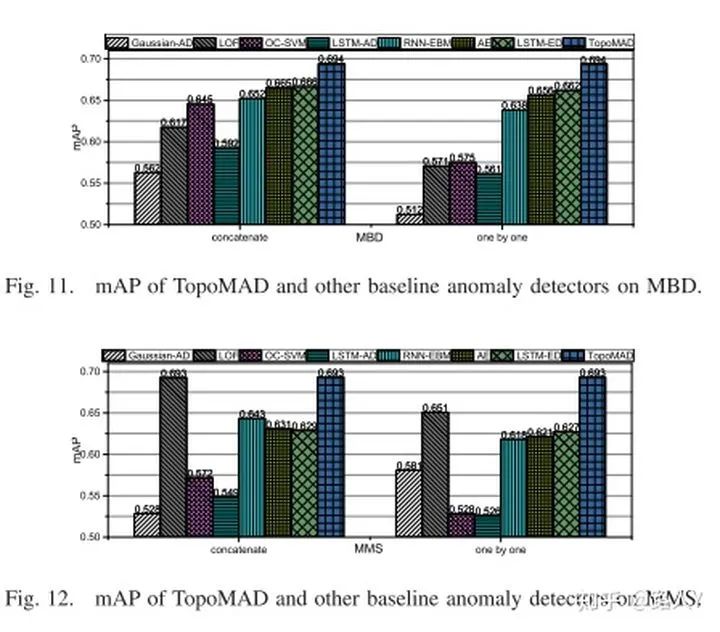
总体对比
本文实验使用了两个数据集,MBD(一个批处理的数据集)、NMS(微服务场景的数据集)。TopoMAD均好于传统方法。

02
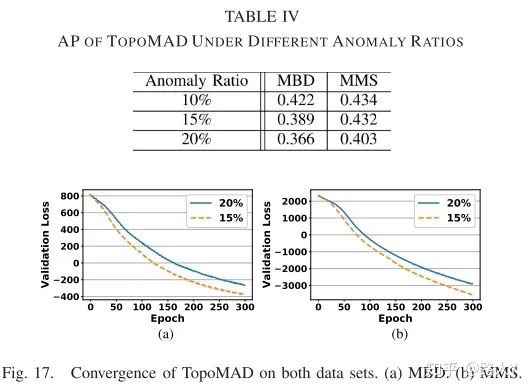
鲁棒性
03
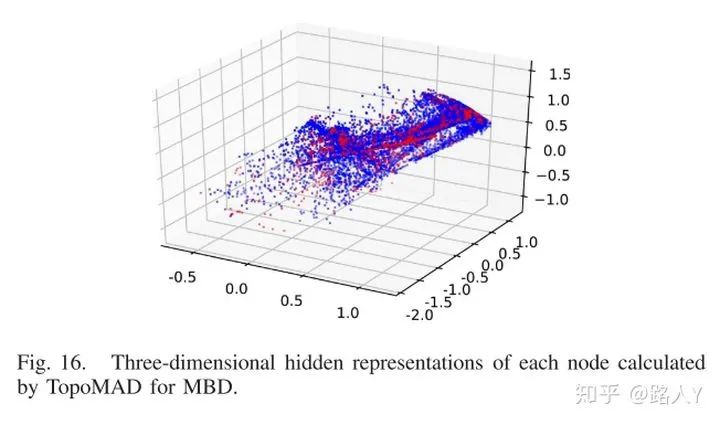
可解释性
异常的隐变量和真实的隐变量差距不大,因此VAE不会重构异常。
04
消融实验
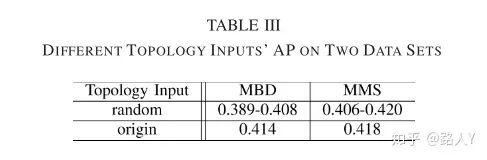
空间信息的作用
实验方法是将矩阵随机化,这样会混淆空间信息。结果表示在混淆空间信息之后,点数会有下降。
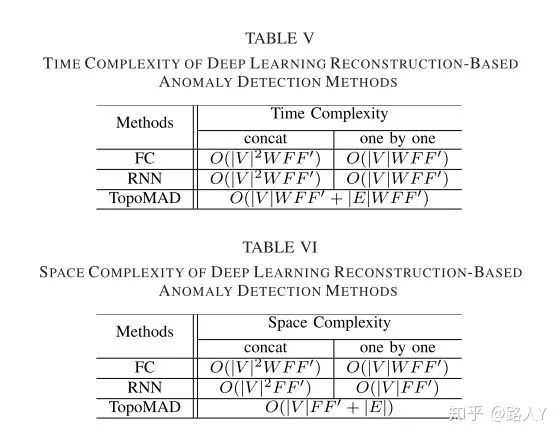
05
复杂度分析
总结
本论文主要的目标是将拓扑信息融入到系统检测的过程中
在传统的LSTM中使用GNN的方法引入了拓扑的信息。
VAE+Seq2Seq的形式,增加模型的学习能力。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









