







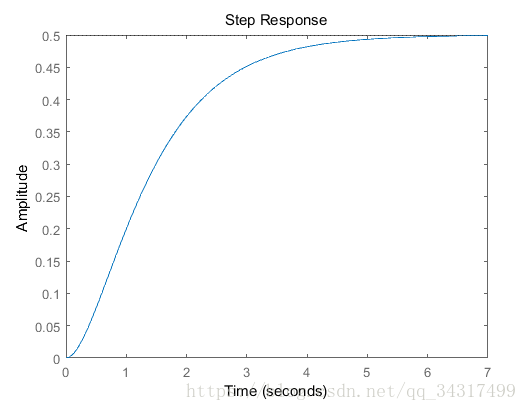
% PID Example clear all clc num=[1]; den=[1 3 1]; Gp=tf(num,den); H=[1]; M=feedback(Gp,H); step(M); hold on;
%%可以通过右键"递增值和运行节"来增加变量的值 Kp=26.33314 Ki=1 Kd=8 Gc=pid(Kp,Ki,Kd); Mc=feedback(Gc*Gp,H) step(Mc) grid on
Kp =
26.3331
Ki =
1
Kd =
8
Mc =
8 s^2 + 26.33 s + 1
--------------------------
s^3 + 11 s^2 + 27.33 s + 1
Continuous-time transfer function.














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









