









这是我看的第一篇无监督视频目标分割的方法(UVOS),是一篇CVPR2019,之前一直看的是半监督VOS,因为思路卡壳,在无监督VOS方法中寻求一下灵感。相较于半监督已经开始在保持精度的情况重视推理速度,无监督还是看重精度,不过毕竟UVOS没有给要分割哪一个目标。
idea
作者提出一种co-attention,基于一个视频序列全局角度,来提升UVOS的精度。(确实领先目前的很多模型,davis官网的数据)。以往的一些方法,有通过显著性检测得到所要分割的目标,或者通过有限帧之间计算出的光流信息。COSNet则从整个视频序列中考虑哪个目标是需要分割的。在测试阶段,COSNet会综合所有前面的帧得到的信息,推理出当前帧中哪个目标是显著的同时还是经常出现的。Co-attention模块挖掘了视频帧之间丰富的上下文信息。基于co-attention,作者提出了COSNet(co attention Siamese)来从一个全局视角建模UVOS 。现在可能读者还是不能理解这个全局视角是什么,在method部分会解释。
main contribution
- COSNet采用的训练方式是考虑一个pair,包含相同视频中的任意两帧,所以说极大的增加了数据量,不需要考虑时序关系,依次送入数据,而是可以打乱数据,随机组合。
- 显示建模帧和帧的联系,不依赖光流
- 统一的,端到端、可训练的高效网络
Method
这个section,将分为两个部分,一个是training stage的网络是如何工作的。另一部分是模型在test stage的行为。
training stage
overview of training model
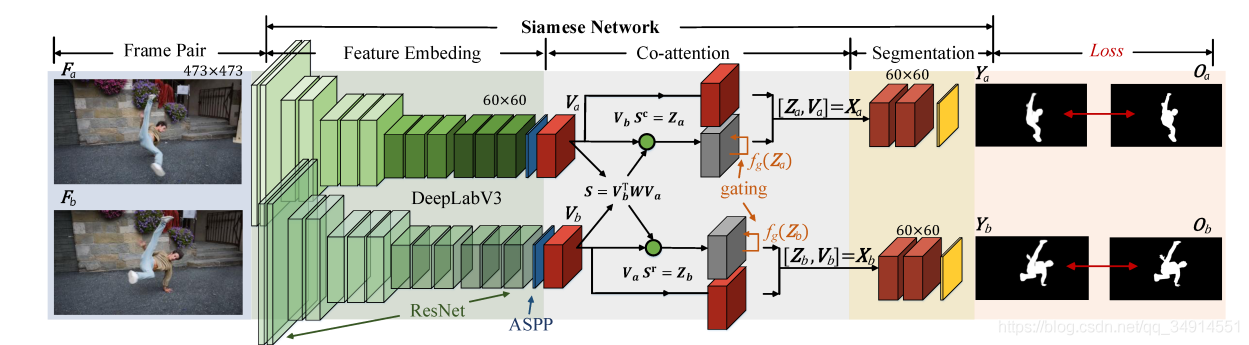
两个帧 F a , F b F_a, F_b Fa,Fb经过backbone得到两个特征 V a , V b V_a, V_b Va,Vb,这两个特征经过Co-attention模块,得到两个新的特征 X a , X b X_a, X_b Xa,Xb,新的特征带有两帧的联系性,这两个特征用于计算loss。从结构框图中,我们可以看出,关键的地方就是在于Co-attention模块。
co-attention
作者提出三种co-attention 变体(variants) 前文提到的 V a , V b V_a, V_b Va,Vb默认被reshap为 R C × H W R^{C \times HW} RC×HW
Vanilla co-attention
记仿射矩阵S,
S
=
V
b
T
W
V
a
∈
R
W
H
×
W
H
S = V_b^T W V_a \in R^{WH \times WH}
S=VbTWVa∈RWH×WH
W
∈
R
C
×
C
W \in R^{C \times C}
W∈RC×C是需要学习的权重矩阵,S的每一个元素代表了两个特征中的两列的相似程度(向量乘积是一个标量)。把W对角化:
W
=
P
−
1
D
P
W = P^{-1}D P
W=P−1DP
P是可逆矩阵,S可以写成
S
=
V
b
T
P
−
1
D
P
V
a
S = V_b^TP^{-1}DPV_a
S=VbTP−1DPVa
Symmetric co-attention (对称)
如果W是一个对称矩阵,那么W一定可以正交对角化,
S
=
V
b
T
P
T
D
P
V
a
S = V_b^TP^TDPV_a
S=VbTPTDPVa
S
=
(
P
V
b
)
T
D
P
V
a
S = (PV_b)^TDPV_a
S=(PVb)TDPVa$
P是正交矩阵,先将两个特征投影到正交空间中,然后在计算相似距离,这样子可以消除通道之间的联系,使得特征不是冗余的。
Channel-wise co-attention
如果P是一个单位矩阵I,那么D可以被分解为两个对角矩阵。
S
=
V
b
T
I
−
1
D
I
V
a
=
(
D
a
V
b
)
T
D
b
V
a
S = V_b^T I^{-1}DIV_a = (D_a V_b)^T D_b V_a
S=VbTI−1DIVa=(DaVb)TDbVa
其中
D
=
D
a
T
D
b
D = D_a^T D_b
D=DaTDb,D_a,D_b$都是对角矩阵。那么一个对角矩阵和一个矩阵相乘,得到的结果其实是对角矩阵对角线的值乘以对应的列。可以视作增强了某一个通道。和SENet有异曲同工之效果。也是减小了冗余度。
介绍完获得S的三种方式,接下来就介绍作者的co-attention.
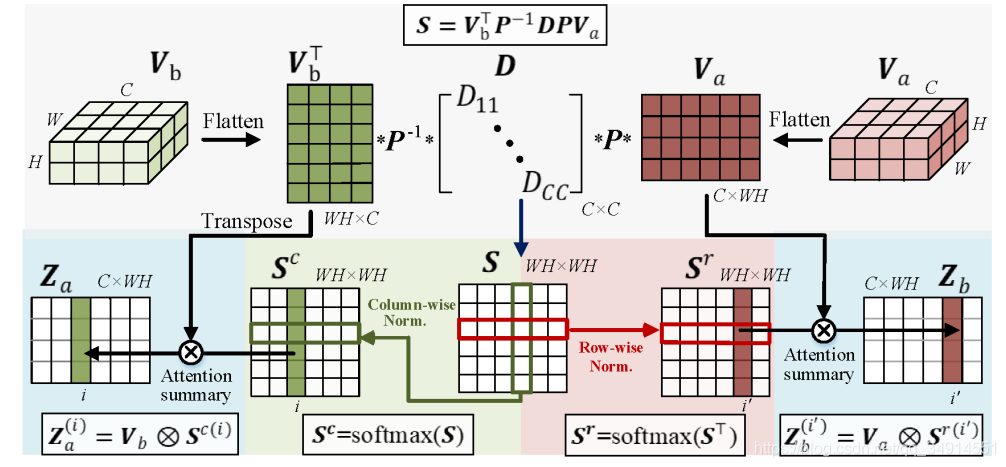
得到S,对应第二行中间的部分,之后就分成两条路。左边得到
S
c
S^c
Sc,往右边走得到
S
r
S^r
Sr。这两个S分别反映了两个特征图Va,Vb之间的联系。想想它们的计算方式。接下来计算
Z
a
,
Z
b
Z_a,Z_b
Za,Zb
Z
a
=
V
b
S
c
Z_a = V_b S^c
Za=VbSc
Z
b
=
V
a
S
r
Z_b = V_aS^r
Zb=VaSr
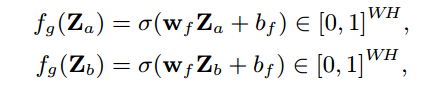
Gated co-attention
作者引入Gated(门限),给学到的Z用同样大小的map reweights,算是空间注意力吧。

之后concat 从backbone得到的特征X

得到的两个重构的X,这个X是带有帧与帧之间的联系这个信息的, 送到各自的seg Head中。
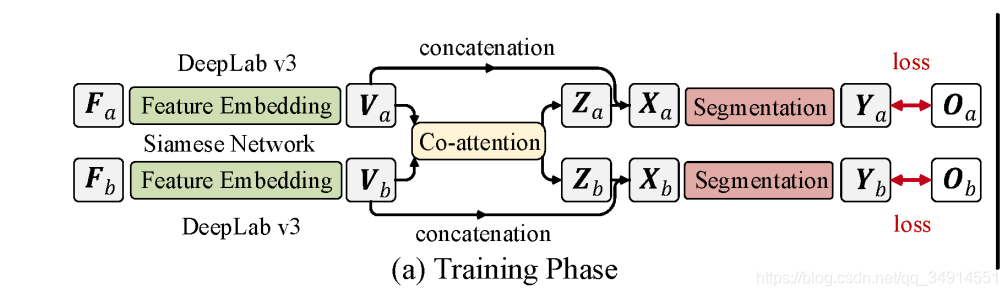
整个训练方式如上图:
- 随机从一个视频中选出两帧,经过backbone,经过co-attention,最后concat上backbone的特征,送到一个分割模块中,得到的预测结果用于计算损失函数。
- 作者提到使用在显著性数据集上预训练一个DeeplabV3,在deeplabV3后面加一个2通道的1x1的卷积作为输出。
test stage
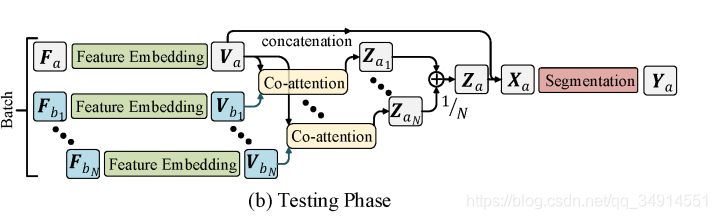
首先选出N张参考帧集合
F
b
=
{
F
b
1
.
.
.
,
F
b
n
}
F_b = \left\{F_{b1}...,F_{bn}\right\}
Fb={Fb1...,Fbn}
和当前帧
F
a
F_a
Fa,
F
a
F_a
Fa和
F
b
F_b
Fb中的所有参考帧都做成pair,得到一系列的
Z
a
Z_a
Za,然后按照

得到
携
带
所
有
参
考
帧
和
当
前
帧
联
系
的
特
征
Z
a
携带所有参考帧和当前帧联系的特征Z_a
携带所有参考帧和当前帧联系的特征Za,然后concat Va,送到分割网络中。
后处理使用了CRF














 1201
1201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









