







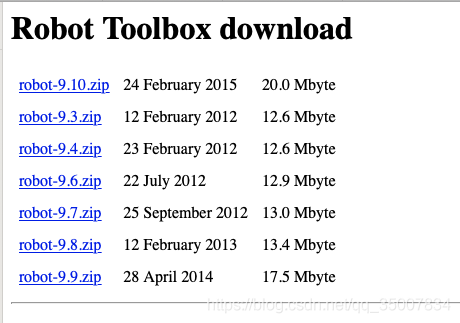
1、工具箱下载:
http://www.petercorke.com/RTB/button.php
2、安装教程
Macbook Matlab2017 安装机器人学工具箱(Robotic Toolbox for Matlab)_^_^妖言惑眾的博客-CSDN博客
亲测可行
测试
clear;
clc;
%cd(matlabroot)
%建立机器人模型
% theta d a alpha offset
ML1=Link([0 0 0 0 1 ],'modified');
ML2=Link([pi/2 0 0 pi/2 1 ],'modified');
ML3=Link([0 0 0 0 1 ],'modified');
ML4=Link([pi/2 0 0 pi/2 0 ],'modified');
ML5=Link([0 0 0 0 0 ],'modified');
modrobot=SerialLink([ML1 ML2 ML3 ML4 ML5],'name','Xinje-mod');
# 重点在q0这里!!!!!!!!!!
#我的前三个关节是平移关节,所以offset设置为非0;
#后面两个关节是旋转关节,offset=0
#因为theta在旋转关节是参与计算的,所以旋转关节在设置关节转动角度时,需要加上它本身属性的theta
#也就是说这里ML4的角度我设置的是0,本身属性theta=pi/2,所以参与计算的应该是 0+pi/2
q0=[0 0 0 0+pi/2 0];
T0 = modrobot.fkine(q0);%计算位姿
% 显示qo时机械臂的姿态
% figure(1)
% modrobot.plot(q0);# 重点在q0这里!!!!!!!!!!
#我的前三个关节是平移关节,所以offset设置为非0;
#后面两个关节是旋转关节,offset=0
#因为theta在旋转关节是参与计算的,所以旋转关节在设置关节转动角度时,需要加上它本身属性的theta
#也就是说这里ML4的角度我设置的是0,本身属性theta=pi/2,所以参与计算的应该是 0+pi/2
q0=[0 0 0 0+pi/2 0];














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









