







一、简介

MF RC522 是应用于 13.56MHz 非接触式通信中高集成度读写卡系列芯片中的一员。是 NXP 公司针对“三表”应用推出的一款低电压、低成本、体积小的非接触式读写卡芯片,是智能仪表和便携式手持设备研发的较好选择。
MFRC522数据手册: https://pan.baidu.com/s/10v68Z7sCFFSwPgrZ2eHtXw?pwd=d4fw 提取码:d4fw
二、硬件连接
| 功能口 | 引脚 |
|---|---|
| MISO | 25 |
| MOSI | 24 |
| CLK | 23 |
| CSN | 22 |
| RST | 26 |
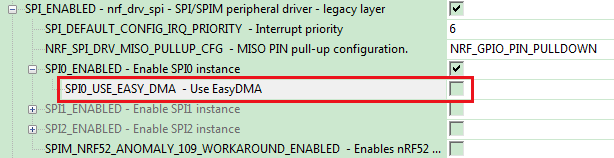
三、添加SPI驱动
查看 NRF52832学习笔记(5)——SPI接口使用
不勾选EasyDMA
四、工程代码
百度网盘:https://pan.baidu.com/s/1vIkWuXDgTIYb8vAT8yfUMA?pwd=xprr 提取码:xprr
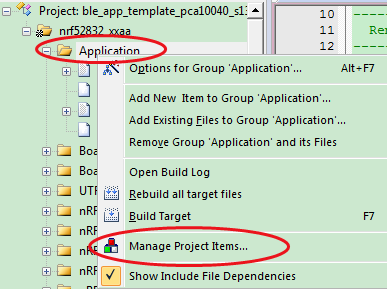
将 board_gpio.c、board_gpio.h、board_mfrc522.c、board_mfrc522.h、board_spi.c 和 board_spi.h 两个文件加入工程的Application文件夹下
4.1 board_gpio.c
/*********************************************************************
* INCLUDES
*/
#include "nrf_gpio.h"
#include "app_error.h"
#include "board_gpio.h"
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief NFC复位引脚初始化
@param 无
@return 无
*/
void NFC_GPIO_Init(void)
{
nrf_gpio_cfg_output(NFC_RST_GPIO_PIN);
NFC_GPIO_Write(NFC_RST_HIGH);
}
/**
@brief 配置NFC复位引脚工作模式
@param mode -[in] 工作模式
@return 无
*/
void NFC_GPIO_Write(uint8_t mode)
{
nrf_gpio_pin_write(NFC_RST_GPIO_PIN, mode);
}
/****************************************************END OF FILE****************************************************/
4.2 board_gpio.h
#ifndef _BOARD_GPIO_H_
#define _BOARD_GPIO_H_
/*********************************************************************
* INCLUDES
*/
#include "nrf_gpio.h"
/*********************************************************************
* DEFINITIONS
*/
/*=========================================================================*/
/* 输出 */
/*=========================================================================*/
#define NFC_RST_GPIO_PIN 26
#define NFC_RST_LOW 0x00
#define NFC_RST_HIGH 0x01
/*********************************************************************
* API FUNCTIONS
*/
void NFC_GPIO_Init(void);
void NFC_GPIO_Write(uint8_t mode);
#endif /* _BOARD_GPIO_H_ */
4.3 board_spi.c
/*********************************************************************
* INCLUDES
*/
#include "nrf_drv_spi.h"
#include "nrf_gpio.h"
#include "app_error.h"
#include "board_spi.h"
static void spiEventCallback(nrf_drv_spi_evt_t const *pEvent, void *arg);
/*********************************************************************
* LOCAL VARIABLES
*/
static volatile bool s_transferOk = true; // SPI数据传输完成标志
static const nrf_drv_spi_t s_spiHandle = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE); // SPI instance
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief NFC SPI驱动初始化
@param 无
@return 无
*/
void NFC_SPI_Init(void)
{
ret_code_t errCode;
nrf_drv_spi_config_t spiConfig = NRF_DRV_SPI_DEFAULT_CONFIG; // 使用SPI默认配置
// 配置SPI端口,注意CSN不要在这设置,另外用GPIO口控制
spiConfig.miso_pin = NFC_SPI_MISO_PIN;
spiConfig.mosi_pin = NFC_SPI_MOSI_PIN;
spiConfig.sck_pin = NFC_SPI_SCLK_PIN;
spiConfig.mode = NRF_DRV_SPI_MODE_0;
spiConfig.frequency = SPI_FREQUENCY_FREQUENCY_K250;
spiConfig.irq_priority = 4; // 在定时器中使用优先级需小于6
errCode = nrf_drv_spi_init(&s_spiHandle, &spiConfig, spiEventCallback, NULL);
APP_ERROR_CHECK(errCode);
nrf_gpio_cfg_output(NFC_SPI_CS_PIN);
}
/**
@brief NFC SPI读出写入数据
@param pWriteData -[in] 写入数据
@param pReadData -[out] 读出数据
@param writeDataLen -[in] 写入数据长度
@return 无
*/
void NFC_SPI_Transfer(uint8_t *pWriteData, uint8_t *pReadData, uint8_t writeDataLen)
{
s_transferOk = false;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&s_spiHandle, pWriteData, writeDataLen, pReadData, writeDataLen));
while(!s_transferOk)
{
__WFE();
} // Error in SPI or transfer already in progress.
}
/**
@brief 开启SPI,与初始化区别:没有初始化CS引脚
@param 无
@return 无
*/
void NFC_SPI_Enable(void)
{
ret_code_t errCode;
nrf_drv_spi_config_t spiConfig = NRF_DRV_SPI_DEFAULT_CONFIG; // 使用SPI默认配置
// 配置SPI端口,注意CSN不要在这设置,另外用GPIO口控制
spiConfig.miso_pin = NFC_SPI_MISO_PIN;
spiConfig.mosi_pin = NFC_SPI_MOSI_PIN;
spiConfig.sck_pin = NFC_SPI_SCLK_PIN;
spiConfig.mode = NRF_DRV_SPI_MODE_0;
spiConfig.frequency = SPI_FREQUENCY_FREQUENCY_K250;
spiConfig.irq_priority = 4; // 在定时器中使用优先级需小于6
errCode = nrf_drv_spi_init(&s_spiHandle, &spiConfig, spiEventCallback, NULL);
APP_ERROR_CHECK(errCode);
}
/**
@brief 禁用SPI
@param 无
@return 无
*/
void NFC_SPI_Disable(void)
{
nrf_drv_spi_uninit(&s_spiHandle);
}
/*********************************************************************
* LOCAL FUNCTIONS
*/
/**
@brief SPI事件处理回调函数
@param 无
@return 无
*/
static void spiEventCallback(nrf_drv_spi_evt_t const *pEvent, void *arg)
{
s_transferOk = true;
}
/****************************************************END OF FILE****************************************************/
4.4 board_spi.h
#ifndef _BOARD_SPI_H_
#define _BOARD_SPI_H_
/*********************************************************************
* INCLUDES
*/
#include "nrf_gpio.h"
/*********************************************************************
* DEFINITIONS
*/
#define NFC_SPI_MISO_PIN 25
#define NFC_SPI_MOSI_PIN 24
#define NFC_SPI_SCLK_PIN 23
#define NFC_SPI_CS_PIN 22
#define SPI_CS_HIGH nrf_gpio_pin_write(NFC_SPI_CS_PIN, 1)
#define SPI_CS_LOW nrf_gpio_pin_write(NFC_SPI_CS_PIN, 0)
#define SPI_INSTANCE 0 // SPI instance index
/*********************************************************************
* API FUNCTIONS
*/
void NFC_SPI_Init(void);
void NFC_SPI_Transfer(uint8_t *pWriteData, uint8_t *pReadData, uint8_t writeDataLen);
void NFC_SPI_Enable(void);
void NFC_SPI_Disable(void);
#endif /* _BOARD_SPI_H_ */
4.5 board_mfrc522.c
/*********************************************************************
* INCLUDES
*/
#include "nrf_delay.h"
#include "nrf_log.h"
#include "board_gpio.h"
#include "board_spi.h"
#include "board_mfrc522.h"
static char pcdRequest(uint8_t reqCode, uint8_t *pTagType);
static char pcdAnticoll(uint8_t *pSnr);
static char pcdSelect(uint8_t *pSnr);
static char pcdAuthState(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr);
static char pcdRead(uint8_t addr, uint8_t *pData);
static char pcdWrite(uint8_t addr, uint8_t *pData);
static void pcdReset(void);
static void calulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData);
static char pcdComMF522(uint8_t command, uint8_t *pInData, uint8_t inLenByte, uint8_t *pOutData, uint32_t *pOutLenBit);
static void pcdAntennaOn(void);
static void pcdAntennaOff(void);
static void setBitMask(uint8_t reg, uint8_t mask);
static void clearBitMask(uint8_t reg, uint8_t mask);
static uint8_t readRawRc(uint8_t addr);
static void writeRawRc(uint8_t addr, uint8_t writeData);
static void delayMs(uint8_t time);
/*********************************************************************
* LOCAL VARIABLES
*/
static uint8_t s_cardType[2]; // 卡类型
static uint8_t s_cardSerialNo[4]; // 卡序列号
static uint8_t s_defaultKeyA[6] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00}; // 默认密码A
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief MFRC522的初始化函数
@param 无
@return 无
*/
void MFRC522_Init(void)
{
pcdReset(); // 复位
delayMs(5);
// NRF_LOG_INFO("reg: %02x" ,readRawRc(Status1Reg));
// NRF_LOG_INFO("reg: %02x" ,readRawRc(Status2Reg));
// NRF_LOG_INFO("reg: %02x" ,readRawRc(WaterLevelReg));
pcdAntennaOn(); // 开启天线发射
}
/**
@brief MFRC522读取卡片块数据
@param addr -[in] 块地址
@return 状态值,0 - 成功;2 - 无卡;3 - 防冲撞失败;4 - 选卡失败;5 - 密码错误
*/
uint8_t MFRC522_ReadCardDataBlock(uint8_t addr)
{
memset(s_cardSerialNo, 0, 4);
if(pcdRequest(PICC_REQALL, s_cardType) == MI_OK)
{
}
else
{
NRF_LOG_INFO("ERR: 2");
return 2; // 无卡
}
if(pcdAnticoll(s_cardSerialNo) == MI_OK)
{
}
else
{
NRF_LOG_INFO("ERR: 3");
return 3; // 防冲撞失败
}
if(pcdSelect(s_cardSerialNo) == MI_OK)
{
}
else
{
NRF_LOG_INFO("ERR: 4");
return 4; // 选卡失败
}
if(pcdAuthState(PICC_AUTHENT1A, addr, s_defaultKeyA, s_cardSerialNo) == MI_OK)
{
NRF_LOG_INFO("ERR: 0");
return 0;
}
else
{
NRF_LOG_INFO("ERR: 5");
return 5; // 密码错误
}
}
/**
@brief 读取卡片序列号
@param pCardSerialNo -[out] 卡片序列号
@return 0 - 读卡成功;2 - 无卡
*/
uint8_t MFRC522_ReadCardSerialNo(uint8_t *pCardSerialNo)
{
uint8_t status = MFRC522_ReadCardDataBlock(4);
memcpy(pCardSerialNo, s_cardSerialNo, 4);
return status;
}
/*********************************************************************
* LOCAL FUNCTIONS
*/
/**
@brief 寻卡
@param reqCode -[in] 寻卡方式,0x52 寻感应区内所有符合1443A标准的卡,0x26 寻未进入休眠状态的卡
@param pTagType -[out] 卡片类型代码
0x4400 = Mifare_UltraLight
0x0400 = Mifare_One(S50)
0x0200 = Mifare_One(S70)
0x0800 = Mifare_Pro(X)
0x4403 = Mifare_DESFire
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdRequest(uint8_t reqCode, uint8_t *pTagType)
{
char status;
uint32_t len;
uint8_t comMF522Buf[MAXRLEN];
clearBitMask(Status2Reg, 0x08);
writeRawRc(BitFramingReg, 0x07);
setBitMask(TxControlReg, 0x03);
comMF522Buf[0] = reqCode;
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 1, comMF522Buf, &len); // 发送并接收数据
if((status == MI_OK) && (len == 0x10))
{
NRF_LOG_INFO("mi_ok");
*pTagType = comMF522Buf[0];
*(pTagType+1) = comMF522Buf[1];
}
else
{
NRF_LOG_INFO("mi_err");
status = MI_ERR;
}
return status;
}
/**
@brief 防冲撞
@param pSnr -[out] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdAnticoll(uint8_t *pSnr)
{
char status;
uint8_t i, snrCheck = 0;
uint32_t len;
uint8_t comMF522Buf[MAXRLEN];
clearBitMask(Status2Reg, 0x08); // 寄存器包含接收器和发送器和数据模式检测器的状态标志
writeRawRc(BitFramingReg, 0x00); // 不启动数据发送,接收的LSB位存放在位0,接收到的第二位放在位1,定义发送的最后一个字节位数为8
clearBitMask(CollReg, 0x80); // 所有接收的位在冲突后将被清除
comMF522Buf[0] = PICC_ANTICOLL1;
comMF522Buf[1] = 0x20;
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 2, comMF522Buf, &len);
if(status == MI_OK)
{
for(i = 0; i < 4; i++)
{
*(pSnr + i) = comMF522Buf[i];
snrCheck ^= comMF522Buf[i];
}
if(snrCheck != comMF522Buf[i]) // 返回四个字节,最后一个字节为校验位
{
status = MI_ERR;
}
}
setBitMask(CollReg, 0x80);
return status;
}
/**
@brief 选定卡片
@param pSnr -[in] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdSelect(uint8_t *pSnr)
{
char status;
uint8_t i;
uint8_t comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_ANTICOLL1;
comMF522Buf[1] = 0x70;
comMF522Buf[6] = 0;
for(i = 0; i < 4; i++)
{
comMF522Buf[i + 2] = *(pSnr + i);
comMF522Buf[6] ^= *(pSnr + i);
}
calulateCRC(comMF522Buf, 7, &comMF522Buf[7]);
clearBitMask(Status2Reg, 0x08);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 9, comMF522Buf, &len);
if((status == MI_OK ) && (len == 0x18))
{
status = MI_OK;
}
else
{
status = MI_ERR;
}
return status;
}
/**
@brief 验证卡片密码
@param authMode -[in] 密码验证模式,0x60 验证A密钥,0x61 验证B密钥
@param addr -[in] 块地址
@param pKey -[in] 密码
@param pSnr -[in] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdAuthState(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = authMode;
comMF522Buf[1] = addr;
for(i = 0; i < 6; i++)
{
comMF522Buf[i + 2] = *(pKey + i);
}
for(i = 0; i < 6; i++)
{
comMF522Buf[i + 8] = *(pSnr + i);
}
status = pcdComMF522(PCD_AUTHENT, comMF522Buf, 12, comMF522Buf, &len);
if((status != MI_OK ) || ( ! (readRawRc(Status2Reg) & 0x08)))
{
status = MI_ERR;
}
return status;
}
/**
@brief 读取M1卡一块数据
@param addr -[in] 块地址
@param pData -[out] 读出的数据,16字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdRead(uint8_t addr, uint8_t *pData)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_READ;
comMF522Buf[1] = addr;
calulateCRC(comMF522Buf, 2, &comMF522Buf[2]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 4, comMF522Buf, &len);
if((status == MI_OK) && (len == 0x90))
{
for(i = 0; i < 16; i++)
{
*(pData + i) = comMF522Buf[i];
}
}
else
{
status = MI_ERR;
}
return status;
}
/**
@brief 写入M1卡一块数据
@param addr -[in] 块地址
@param pData -[out] 写入的数据,16字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdWrite(uint8_t addr, uint8_t *pData)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_WRITE;
comMF522Buf[1] = addr;
calulateCRC(comMF522Buf, 2, &comMF522Buf[2]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 4, comMF522Buf, &len);
if((status != MI_OK) || (len != 4) || ((comMF522Buf[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
if(status == MI_OK)
{
for(i = 0; i < 16; i++)
{
comMF522Buf[i] = *(pData + i);
}
calulateCRC(comMF522Buf, 16, &comMF522Buf[16]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 18, comMF522Buf, &len);
if((status != MI_OK) || (len != 4) || ((comMF522Buf[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
}
return status;
}
/**
@brief 复位RC522
@return 无
*/
static void pcdReset(void)
{
// 需先保持高电平,后给个下降沿
NFC_GPIO_Write(NFC_RST_LOW);
delayMs(5);
NFC_GPIO_Write(NFC_RST_HIGH);
delayMs(10);
writeRawRc(CommandReg, PCD_RESETPHASE); // 和MI卡通讯,CRC初始值0x6363
delayMs(1);
writeRawRc(ModeReg, 0x3D);
writeRawRc(TReloadRegL, 30);
writeRawRc(TReloadRegH, 0);
writeRawRc(TModeReg, 0x8D);
writeRawRc(TPrescalerReg, 0x3E);
writeRawRc(TxASKReg, 0x40);
}
/**
@brief 用MF522计算CRC16
@param pInData -[in] 计算CRC16的数组
@param len -[in] 计算CRC16的数组字节长度
@param pOutData -[out] 存放计算结果存放的首地址
@return 无
*/
static void calulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData)
{
uint8_t i, n;
clearBitMask(DivIrqReg, 0x04);
writeRawRc(CommandReg, PCD_IDLE);
setBitMask(FIFOLevelReg, 0x80);
for(i = 0; i < len; i++)
{
writeRawRc(FIFODataReg, *(pInData + i));
}
writeRawRc(CommandReg, PCD_CALCCRC);
i = 0xFF;
do
{
n = readRawRc(DivIrqReg);
i--;
}
while((i != 0) && ! (n & 0x04));
pOutData[0] = readRawRc(CRCResultRegL);
pOutData[1] = readRawRc(CRCResultRegM);
}
/**
@brief 通过MFRC522和ISO14443卡通讯
@param command -[in] RC522命令字
@param pInData -[in] 通过RC522发送到卡片的数据
@param inLenByte -[in] 发送数据的字节长度
@param pOutData -[out] 接收到的卡片返回数据
@param pOutLenBit -[out] 返回数据的位长度
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdComMF522(uint8_t command, uint8_t *pInData, uint8_t inLenByte, uint8_t *pOutData, uint32_t *pOutLenBit)
{
char status = MI_ERR;
uint8_t irqEn = 0x00;
uint8_t waitFor = 0x00;
uint8_t lastBits;
uint8_t n;
uint32_t i;
uint8_t j;
switch(command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitFor = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitFor = 0x30;
break;
default:
break;
}
writeRawRc(ComIEnReg, irqEn | 0x80);
clearBitMask(ComIrqReg, 0x80);
writeRawRc(CommandReg, PCD_IDLE);
setBitMask(FIFOLevelReg, 0x80); // 清空FIFO
for(i = 0; i < inLenByte; i++)
{
writeRawRc(FIFODataReg, pInData[i]); // 数据写入FIFO
}
writeRawRc(CommandReg, command); // 命令写入命令寄存器
if(command == PCD_TRANSCEIVE)
{
setBitMask(BitFramingReg, 0x80); // 开始发送
}
i = 6000; // 根据时钟频率调整,操作M1卡最大等待时间25ms
do
{
n = readRawRc(ComIrqReg);
i--;
}
while((i != 0) && !(n & 0x01) && !(n & waitFor));
clearBitMask(BitFramingReg, 0x80);
if(i != 0)
{
j = readRawRc(ErrorReg);
if(!(j & 0x1B))
{
status = MI_OK;
if(n & irqEn & 0x01)
{
status = MI_NOTAGERR;
}
if(command == PCD_TRANSCEIVE)
{
n = readRawRc(FIFOLevelReg);
lastBits = readRawRc(ControlReg) & 0x07;
if(lastBits)
{
*pOutLenBit = (n - 1) * 8 + lastBits;
}
else
{
*pOutLenBit = n * 8;
}
if(n == 0)
{
n = 1;
}
if(n > MAXRLEN)
{
n = MAXRLEN;
}
for(i = 0; i < n; i++)
{
pOutData[i] = readRawRc(FIFODataReg);
}
}
}
else
{
status = MI_ERR;
}
}
setBitMask(ControlReg, 0x80); // stop timer now
writeRawRc(CommandReg, PCD_IDLE);
return status;
}
/**
@brief 开启天线【每次启动或关闭天线发射之间至少有1ms的间隔】
@return 无
*/
static void pcdAntennaOn(void)
{
uint8_t temp;
temp = readRawRc(TxControlReg);
if(!(temp & 0x03))
{
setBitMask(TxControlReg, 0x03);
}
}
/**
@brief 关闭天线
@return 无
*/
static void pcdAntennaOff(void)
{
clearBitMask(TxControlReg, 0x03);
}
/**
@brief 置RC522寄存器位
@param reg -[in] 寄存器地址
@param mask -[in] 置位值
@return 无
*/
static void setBitMask(uint8_t reg, uint8_t mask)
{
char temp = 0x00;
temp = readRawRc(reg) | mask;
writeRawRc(reg, temp | mask); // set bit mask
}
/**
@brief 清RC522寄存器位
@param reg -[in] 寄存器地址
@param mask -[in] 清位值
@return 无
*/
static void clearBitMask(uint8_t reg, uint8_t mask)
{
char temp = 0x00;
temp = readRawRc(reg) & (~mask);
writeRawRc(reg, temp); // clear bit mask
}
/**
@brief 写RC522寄存器
@param addr -[in] 寄存器地址
@param writeData -[in] 写入数据
@return 无
*/
static void writeRawRc(uint8_t addr, uint8_t writeData)
{
SPI_CS_LOW;
addr <<= 1;
addr &= 0x7e;
NFC_SPI_Transfer(&addr, NULL, sizeof(uint8_t));
NFC_SPI_Transfer(&writeData, NULL, sizeof(uint8_t));
SPI_CS_HIGH;
}
/**
@brief 读RC522寄存器
@param addr -[in] 寄存器地址
@return 读出一字节数据
*/
static uint8_t readRawRc(uint8_t addr)
{
uint8_t readData;
SPI_CS_LOW;
addr <<= 1;
addr |= 0x80;
NFC_SPI_Transfer(&addr, NULL, sizeof(uint8_t));
NFC_SPI_Transfer(NULL, &readData, sizeof(uint8_t));
SPI_CS_HIGH;
return readData;
}
/**
@brief 毫秒级延时函数
@param time -[in] 延时时间(毫秒)
@return 无
*/
static void delayMs(uint8_t time)
{
nrf_delay_ms(time);
}
/****************************************************END OF FILE****************************************************/
4.6 board_mfrc522.h
#ifndef _BOARD_MFRC522_H_
#define _BOARD_MFRC522_H_
/*********************************************************************
* INCLUDES
*/
/*********************************************************************
* DEFINITIONS
*/
#define MAXRLEN 18
//******************************************************************/
// MFRC522命令字
//******************************************************************/
#define PCD_IDLE 0x00 // 取消当前命令
#define PCD_AUTHENT 0x0E // 验证密钥
#define PCD_RECEIVE 0x08 // 接收数据
#define PCD_TRANSMIT 0x04 // 发送数据
#define PCD_TRANSCEIVE 0x0C // 发送并接收数据
#define PCD_RESETPHASE 0x0F // 复位
#define PCD_CALCCRC 0x03 // CRC计算
//******************************************************************/
// Mifare_One卡片命令字
//******************************************************************/
#define PICC_REQIDL 0x26 // 寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 // 寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 // 防冲撞
#define PICC_ANTICOLL2 0x95 // 防冲撞
#define PICC_AUTHENT1A 0x60 // 验证A密钥
#define PICC_AUTHENT1B 0x61 // 验证B密钥
#define PICC_READ 0x30 // 读块
#define PICC_WRITE 0xA0 // 写块
#define PICC_DECREMENT 0xC0 // 扣款
#define PICC_INCREMENT 0xC1 // 充值
#define PICC_RESTORE 0xC2 // 调块数据到缓冲区
#define PICC_TRANSFER 0xB0 // 保存缓冲区中数据
#define PICC_HALT 0x50 // 休眠
//******************************************************************/
// MFRC522 FIFO长度定义
//******************************************************************/
#define DEF_FIFO_LENGTH 64 // FIFO size=64byte
//******************************************************************/
// MFRC522寄存器定义
//******************************************************************/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxASKReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
//******************************************************************/
// MFRC522通讯返回错误代码
//******************************************************************/
#define MI_OK (char)0
#define MI_NOTAGERR (char)(-1)
#define MI_ERR (char)(-2)
/*********************************************************************
* API FUNCTIONS
*/
void MFRC522_Init(void);
uint8_t MFRC522_ReadCardDataBlock(uint8_t addr);
uint8_t MFRC522_ReadCardSerialNo(uint8_t *pCardSerialNo);
#endif /* _BOARD_MFRC522_H_ */
五、API调用
需包含头文件 board_mfrc522.h
5.1 MFRC522_Init()
| 功能 | MFRC522初始化函数 |
|---|---|
| 函数定义 | void MFRC522_Init(void) |
| 参数 | 无 |
| 返回 | 无 |
5.2 MFRC522_ReadCardDataBlock()
| 功能 | MFRC522读取卡片块数据 |
|---|---|
| 函数定义 | uint8_t MFRC522_ReadCardDataBlock(uint8_t blockAddr) |
| 参数 | blockAddr:块地址 |
| 返回 | 状态值,0 - 成功;2 - 无卡;3 - 防冲撞失败;4 - 选卡失败;5 - 密码错误 |
5.3 MFRC522_ReadCardSerialNo()
| 功能 | 读取卡片序列号 |
|---|---|
| 函数定义 | uint8_t MFRC522_ReadCardSerialNo(uint8_t *pCardSerialNo) |
| 参数 | pCardSerialNo:卡片序列号 |
| 返回 | 状态值,0 - 读卡成功;2 - 无卡 |
六、使用例子
1)添加头文件
#include "board_gpio.h"
#include "board_mfrc522.h"
#include "board_spi.h"
2)添加初始化代码(main.c的main函数中)
首先调用 NFC_GPIO_Init() 初始化 RFID RC522 模块的 RST 引脚,然后调用 NFC_SPI_Init() 初始化 SPI 通信,最后调用 MFRC522_Init() 初始化 RC522 模块。
/**@brief Function for application main entry.
*/
int main(void)
{
bool erase_bonds;
/*-------------------------- 外设驱初始化 ---------------------------*/
// Initialize.
log_init(); // 日志驱动初始化
timers_init(); // 定时器驱动初始化(在此加入自定义定时器)
NFC_GPIO_Init();
NFC_SPI_Init();
MFRC522_Init();
···
···
/*-------------------------- 开启应用 ---------------------------*/
// Start execution.
NRF_LOG_INFO("Template example started.");
application_timers_start();
3)添加定时器,到达时间读取数据块4
APP_TIMER_DEF(s_testTimer); // 测试的定时器
#define TEST_PERIOD APP_TIMER_TICKS(1000) // 定时时间(1s)
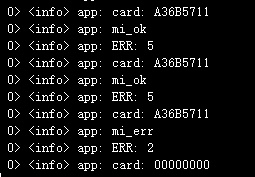
static void timer_testCallback(void *arg)
{
UNUSED_PARAMETER(arg);
uint8_t card[4];
MFRC522_ReadCardSerialNo(card);
NRF_LOG_INFO("card: %02x%02x%02x%02x", card[0], card[1], card[2], card[3]);
}
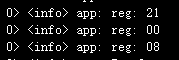
4)复位后,可通过读取以下三个寄存器,判断SPI是否通信成功
NRF_LOG_INFO("reg: %02x" ,readRawRc(Status1Reg));
NRF_LOG_INFO("reg: %02x" ,readRawRc(Status2Reg));
NRF_LOG_INFO("reg: %02x" ,readRawRc(WaterLevelReg));
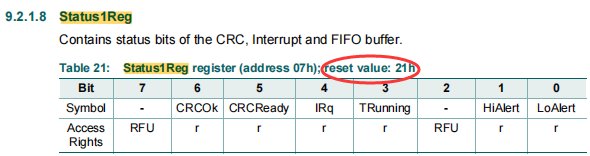
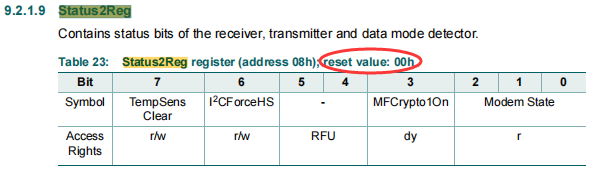
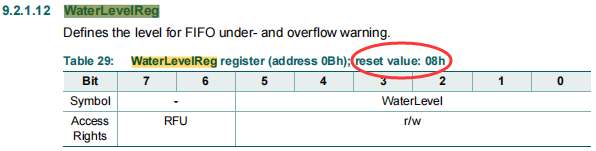
查看打印,返回值与数据手册中描述一致
5)读取卡号
• 由 Leung 写于 2022 年 5 月 26 日















 1136
1136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











