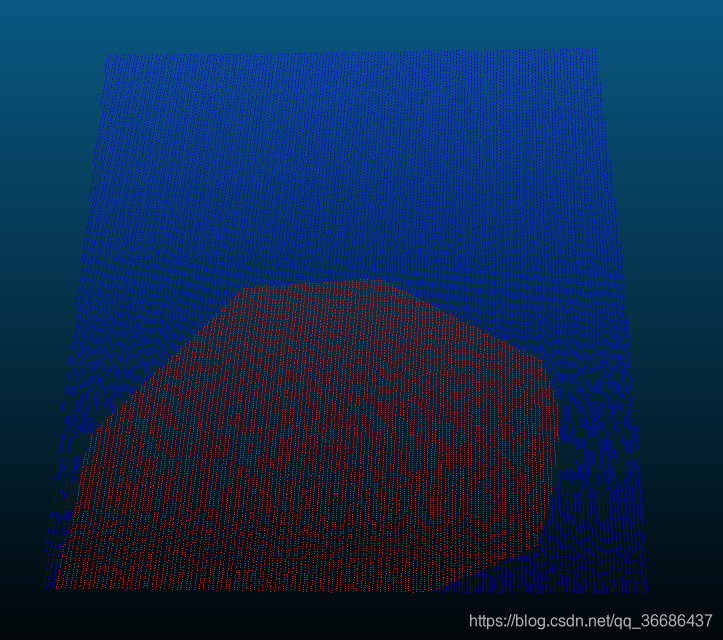
目录 一、算法原理 二、代码实现 三、结果展示 四、CloudCompare 博客长期更新,本文最近一次更新时间为:2024年12月9日。① 优化代码结构和原理介绍;② 代码在PCL1.14.1上运行成功。 一、算法原理 如图所示,红色为点云的重叠区域。 若某一点在某一距离阈值领域内不止其本身一个点,则认为其有重复点。 二、代码实现 #include <iostream> #include








 本文介绍了使用PCL库去除3D点云中重叠点的算法原理,通过设定距离阈值来判断并删除重复点。文章包含详细代码实现,展示了处理后的效果,并提到了CloudCompare软件进行比较验证。
本文介绍了使用PCL库去除3D点云中重叠点的算法原理,通过设定距离阈值来判断并删除重复点。文章包含详细代码实现,展示了处理后的效果,并提到了CloudCompare软件进行比较验证。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 1108
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1108
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








