







opencv API
// ConsoleApplication7.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include<iostream>
#include<opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
cout << "hello world" << endl;
Mat image = imread("C:\\Users\\AEC\\Desktop\\112.JPG");
Mat grayImage;
cvtColor(image, grayImage, CV_BGR2GRAY);
// Create and LSD detector with standard or no refinement.
//Canny(grayImage, grayImage, 50, 300, 3); // Apply canny edge//可选canny算子
#if 1
Ptr<LineSegmentDetector> ls = createLineSegmentDetector(LSD_REFINE_ADV);//或者两种LSD算法,这边用的是standard的
#else
Ptr<LineSegmentDetector> ls = createLineSegmentDetector(LSD_REFINE_NONE);
#endif
double start = double(getTickCount());
vector<Vec4f> lines_std;
// Detect the lines
ls->detect(grayImage, lines_std);//这里把检测到的直线线段都存入了lines_std中,4个float的值,分别为起止点的坐标
for (int i = 0; i < lines_std.size(); i++)
{
cout << lines_std[i][0] << " " << lines_std[i][1] << " "
<< lines_std[i][2] << " " << lines_std[i][3] << endl;
}
double duration_ms = (double(getTickCount()) - start) * 1000 / getTickFrequency();
std::cout << "It took " << duration_ms << " ms." << std::endl;
// Show found lines
Mat drawnLines(image);
ls->drawSegments(drawnLines, lines_std);
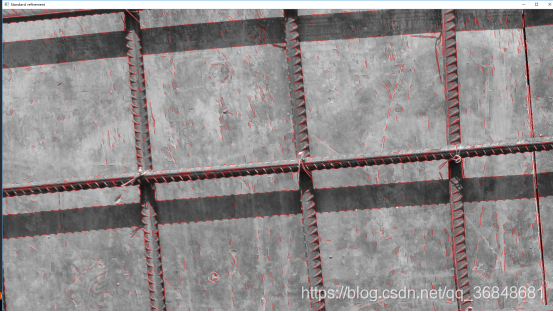
imshow("Standard refinement", drawnLines);
waitKey(0);
return 0;
}
检测效果














 16万+
16万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









