







车道线检测
参考:opencv在python中的哈夫直线变换(Hough Line Transform) https://www.jianshu.com/p/ebaf449b434b

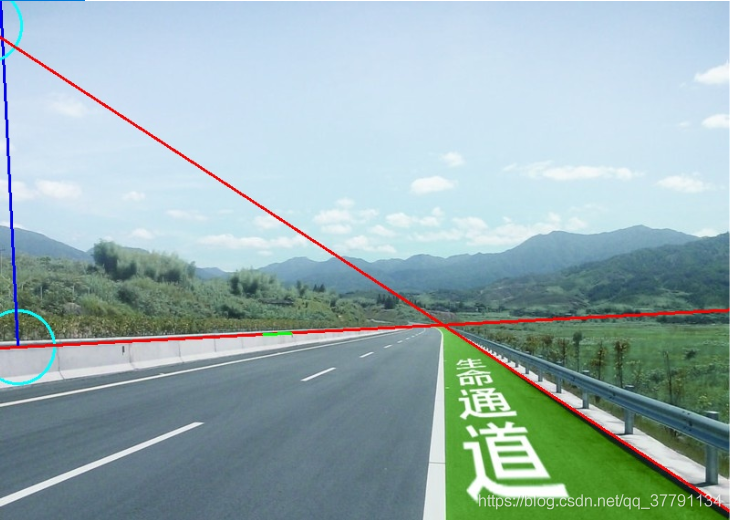
其中第一条直线,以及与中心点垂直的直线示意图如下,分别是红色线和蓝色线,如上图,为啥呢?首先200阈值导致只有两根线,如果设置为100,则有许多线,这个是经验值。lines[i][0][0]表示极坐标半径,lines[i][0][1]表示极坐标角度,这个是切点。所以连接原点的线与所得直线垂直。
结果:
车道线检测
参考:opencv在python中的哈夫直线变换(Hough Line Transform) https://www.jianshu.com/p/ebaf449b434b
其中第一条直线,以及与中心点垂直的直线示意图如下,分别是红色线和蓝色线,如上图,为啥呢?首先200阈值导致只有两根线,如果设置为100,则有许多线,这个是经验值。lines[i][0][0]表示极坐标半径,lines[i][0][1]表示极坐标角度,这个是切点。所以连接原点的线与所得直线垂直。
结果:
 5484
1561
5484
1561











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















