










找了一个从老机器上卸任的英迈克伺服,听说可以串口485控制
网上找了官方的说明书,浏览了一番。
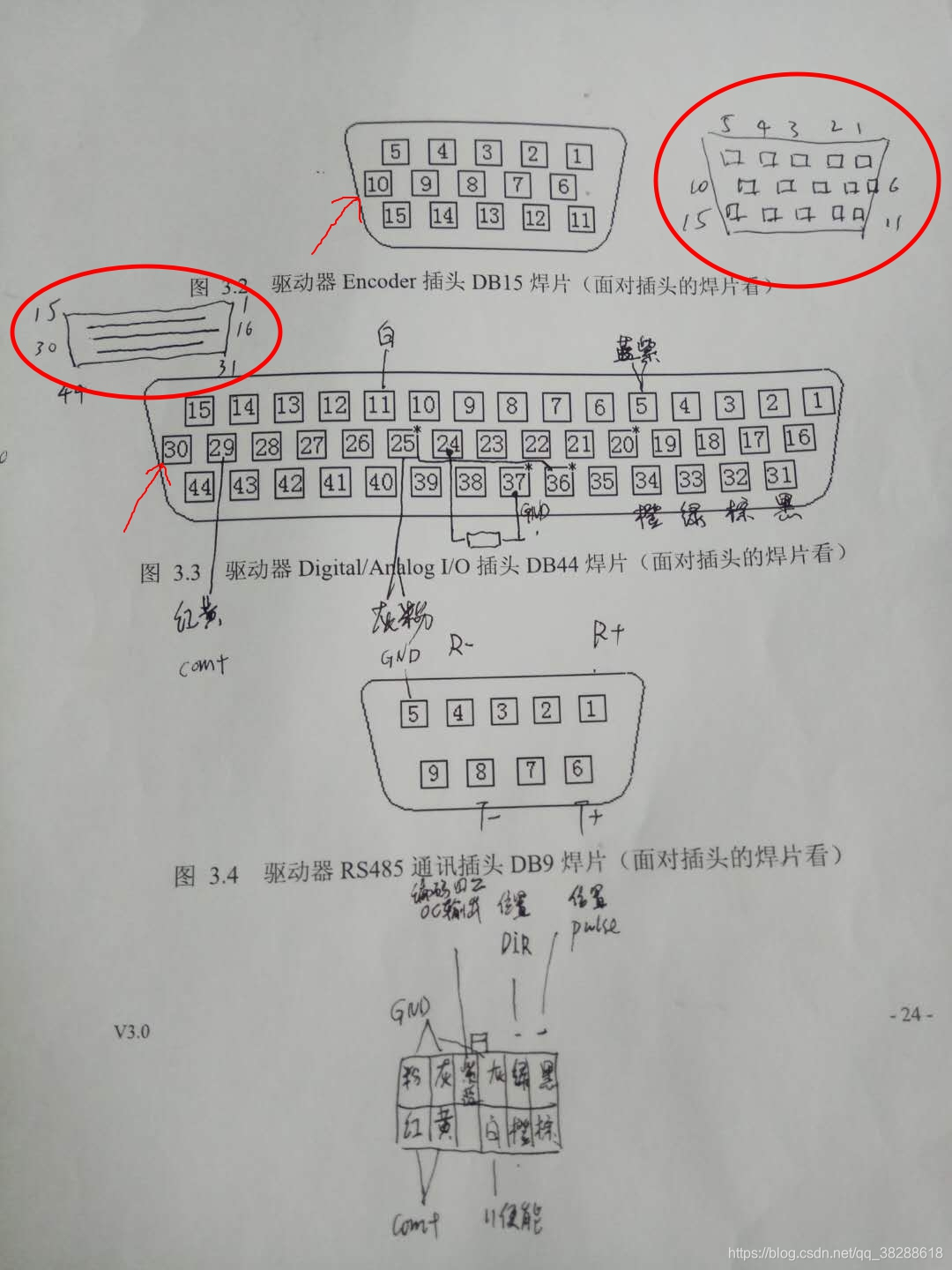
百度搜到3.0版本的 24页DB15 DB44接线图十分不严谨啊,标号正确,图形居然画反了!说错误也不为过。太容易误导接线了
有用到自己接线的师傅特别注意一下咯
到官网也没有找到任何新版说明书的信息,做产品可不能如此粗心大意。
下面我来改正一下
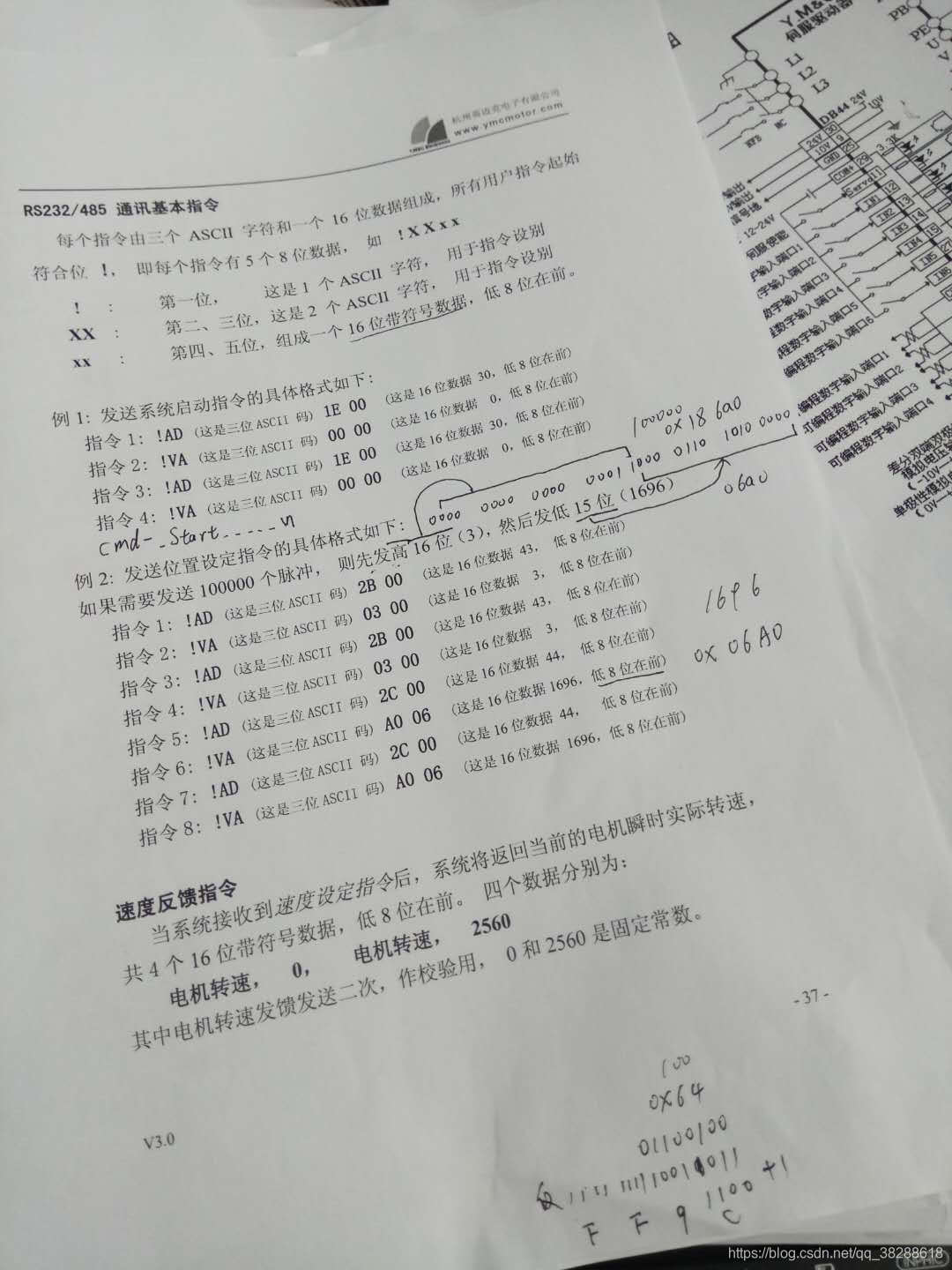
再说串口通信基本指令
!XXxxxx的数据格式 xxxx是16位带符号数据,低八位在前
16位带符号数据字字珠玑
发送31位数据时特别注意 先发高16位,再发低15位 因为带符号!!!所以低15位!!!不是32位数据!!
来张图
针对指令说明写了简单程序,哎,果然能控制。
代码
def int32to16_15(_int32):
_15=_int32&0x7fff
_16=(_int32&0xffffffff)>>15
return (_16,_15)
def int16to8_8(_int16):
_h8=(_int16&0xff00)>>8
_l8=(_int16&0xff)
return (_l8,_h8)
def cmd_start():
# '''
# !XXxxxx的数据格式 xxxx是16位带符号数据,低八位在前
# 系统启动指令!AD30
ad30 = [33, 65, 68, 0x1e, 0]
# !VA0
va0 = [33, 86, 65, 0, 0]
sop.serialSendData(ad30)
sop.serialSendData(va0)
time.sleep(0.001)
# 发送两遍
sop.serialSendData(ad30)
sop.serialSendData(va0)
time.sleep(0.001)
pass
def cmd_stop():
# '''
# ?ST 0 0停止命令
st00 = [63, 83, 84, 0, 0]
sop.serialSendData(st00)
pass
def cmd_posi(p):
# '''s设定位置!AD43 !VAxxxx !AD44 !VAxxxx 说明书理解value是31位有符号数据
#可以设定正负位置
ad43 = [33, 65, 68, 0x2B, 0]
ad44 = [33, 65, 68, 0x2C, 0]
_16_15 = int32to16_15(p)#100000==10圈, 编码器X4为单位;推出10000为1圈,编码器是2500线
_16_l8h8 = int16to8_8(_16_15[0])
_15_l8h8 = int16to8_8(_16_15[1])
va_16 = [33, 86, 65, _16_l8h8[0], _16_l8h8[1]]
va_15 = [33, 86, 65, _15_l8h8[0], _15_l8h8[1]]
sop.serialSendData(ad43)
sop.serialSendData(va_16)
time.sleep(0.001)
sop.serialSendData(ad43)
sop.serialSendData(va_16)
time.sleep(0.001)
sop.serialSendData(ad44)
sop.serialSendData(va_15)
time.sleep(0.001)
sop.serialSendData(ad44)
sop.serialSendData(va_15)
time.sleep(0.001)
pass
def cmd_speed(s):
# '''设定速度!AD30 !VAxxxx
#位置模式下,正负速度无所谓
ad40 = [33, 65, 68, 0x28, 0]
va100 = [33, 86, 65, 0x64, 0x00]#测试数据100
vaN100 = [33, 86, 65, 0x9c, 0xff]#测试数据-100
val8h8=int16to8_8(s)
va=[33, 86, 65, val8h8[0], val8h8[1]]
sop.serialSendData(ad40)
sop.serialSendData(va)
time.sleep(0.001)
sop.serialSendData(ad40)
sop.serialSendData(va)
time.sleep(0.001) # '''
# ----------------------------------
pass
def cmd_posi_speed(p,s):
cmd_speed(s)
cmd_posi(p)
def main():
import time
zzzc=0
while 1:
zzzc+=1
print("-------------------------------",zzzc)
cmd_start()
cmd_posi_speed(1000000, 1500)
time.sleep(6)
cmd_posi_speed(-1000000, 1000)
time.sleep(6)
main()不过速度过快,报错err70,不知何解?
见说明有提到ymclink软件,看起来高大上,但搜不到,官网也没有。
不知通信协议是什么。
问厂家还没答复。这个品牌怎么样,可不可信赖?有没有懂的老师用过485通信控制?希望前辈不吝赐教!














 2273
2273











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









