









resolution——八叉树分辨率,即最小体素的边长(像素单位)
getPointIndicesFromNewVoxels() —— 从前一个缓冲区中不存在的所有叶节点获取索引
switchBuffers()——交换八叉树缓存,但是先前点云对应的八叉树结构仍在内存中
// pointclouds_octree.cpp: 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include<iostream>
#include<fstream>
#include<opencv.hpp>
#include<pcl/io/pcd_io.h>
#include<pcl/point_types.h>
#include<pcl/octree/octree.h>
using namespace std;
using namespace cv;
int main()
{
fstream file_name1, file_name2;
ofstream differ;
differ.open("differ.txt");
file_name1.open("Result3D_end42.txt");
file_name2.open("Result3D_end52.txt");
pcl::PointCloud<pcl::PointXYZ> cloudA;
pcl::PointCloud<pcl::PointXYZ> cloudB;
cloudA.width = 230088;
cloudA.height = 1;
cloudA.is_dense = false;
cloudA.points.resize (cloudA.width*cloudA.height);
cloudB.width = 250025;
cloudB.height = 1;
cloudB.is_dense = false; //点云密度,非密集型
cloudB.points.resize (cloudB.width*cloudB.height);
Vec3d dd;
for (size_t i = 0; i < cloudA.points.size(); i++) {
file_name1 >> dd[0];
file_name1 >> dd[1];
file_name1 >> dd[2];
cloudA.points[i].x = (double)dd[0];
cloudA.points[i].y = (double)dd[1];
cloudA.points[i].z = (double)dd[2];
}
for (size_t j = 0; j < cloudB.points.size(); j++) {
file_name2 >> dd[0];
file_name2 >> dd[1];
file_name2 >> dd[2];
cloudB.points[j].x = (double)dd[0];
cloudB.points[j].y = (double)dd[1];
cloudB.points[j].z = (double)dd[2];
}
float resolution = 10.0f; //八叉树分辨率,即最小体素的边长
//pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution); //初始化octree
pcl::octree::OctreePointCloudChangeDetector<pcl::PointXYZ>octree(resolution); //初始化空间变化检测对象
//添加cloudA到八叉树中
octree.setInputCloud(cloudA.makeShared());
octree.addPointsFromInputCloud();
octree.switchBuffers(); //交换八叉树缓存,但是coludA对应的八叉树结构仍在内存中
//添加cloudB到八叉树中
octree.setInputCloud(cloudB.makeShared());
octree.addPointsFromInputCloud();
vector<int>newPointIdxVector; //存储新加入点索引的向量
octree.getPointIndicesFromNewVoxels(newPointIdxVector);
for (size_t i = 0; i < newPointIdxVector.size(); i++) {
differ << cloudB.points[newPointIdxVector[i]].x << " " << cloudB.points[newPointIdxVector[i]].y << " "
<< cloudB.points[newPointIdxVector[i]].z <<" "<< endl;
}
file_name1, file_name2, differ.close();
return 0;
}
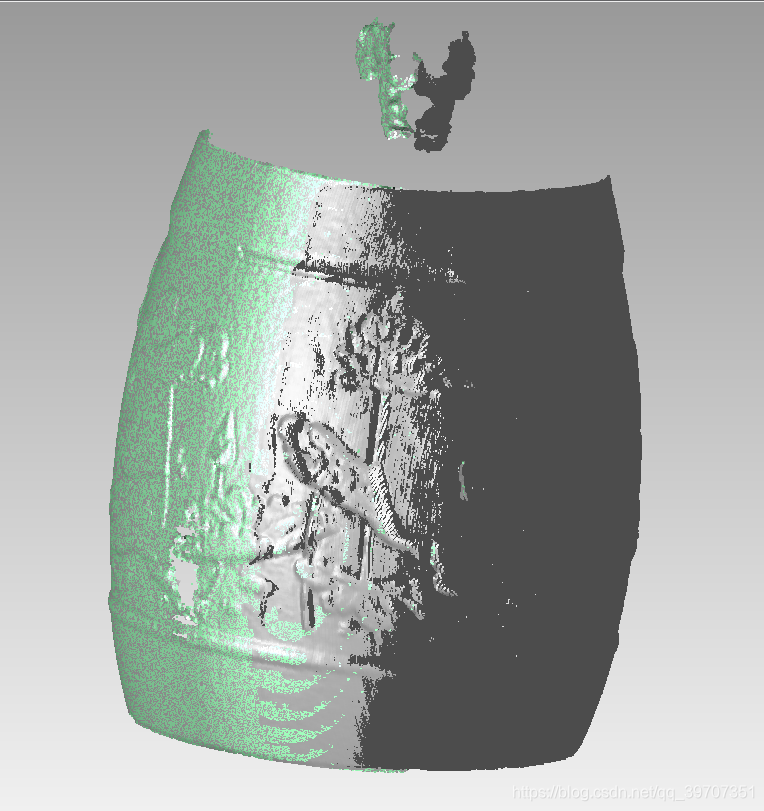
数据在Geomagic中的展示如下:
附:
银色是CloudB中的点,黑色是CloudA中的点,绿色部分是检测出来属于点云B但不属于点云A的所有点。














 6382
6382











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









